基于车路协同的短期交通规划系统设计
2022-08-03陈龙
陈 龙
(新疆交通规划勘察设计研究院有限公司,新疆 乌鲁木齐 830000)
引言
城市交通拥堵是影响城市面貌、城市发展水平和人们出行质量的重要因素[1-2]。交通规划有利于减少拥堵路段车辆的占用率,缓解交通拥堵。通过研究发现,解决交通拥堵问题的前提是分析交通拥堵的原因,即拥堵的时间、地点和客观规律,可以通过GPS 实时记录和相关地图数据获得[3-4]。解决拥堵问题的有效途径是结合车路合作模式,充分实现人车互联,提高交通效率。然而,国内外的相关数据大多是算法描述或理论方法,理论尚未应用到实际生活中[5-6]。因此,有必要开发基于车路协同的短期交通规划与预测系统。
传统上,动态路径规划以出行时间为交通拥挤指标,寻找最短路径规划。由于交通运行状态的实时性和可变性,交通拥挤指数波动较大。传统的交通拥挤指数预测方法通常是用一定时间段的平均值作为短期预测因子来表示交通拥挤指数。然而,区间的大小对预测结果有很大的影响。特别是对于城市道路,受交通信号、交叉口车辆合流等因素影响,使得传统的平均算法存在一定的误差。因此,有必要结合道路和车辆数据,总结拥堵传递的规律和特点,规划城市道路的进一步发展,使驾驶更安全、更高效。
1 车路协同系统分析
1.1 技术构建
车路协同系统基于车路协同的思想和KNN 聚类算法,对车速和交通流进行归类,定位交通瓶颈。同时,利用交叉口的交通信号和车辆合流数据,动态计算当前道路阻力值。利用BP 神经网络算法和ARIMA算法对每条路径的行程时间进行预测,并选择行程时间最小的路径作为最优路径,技术路线见图1。
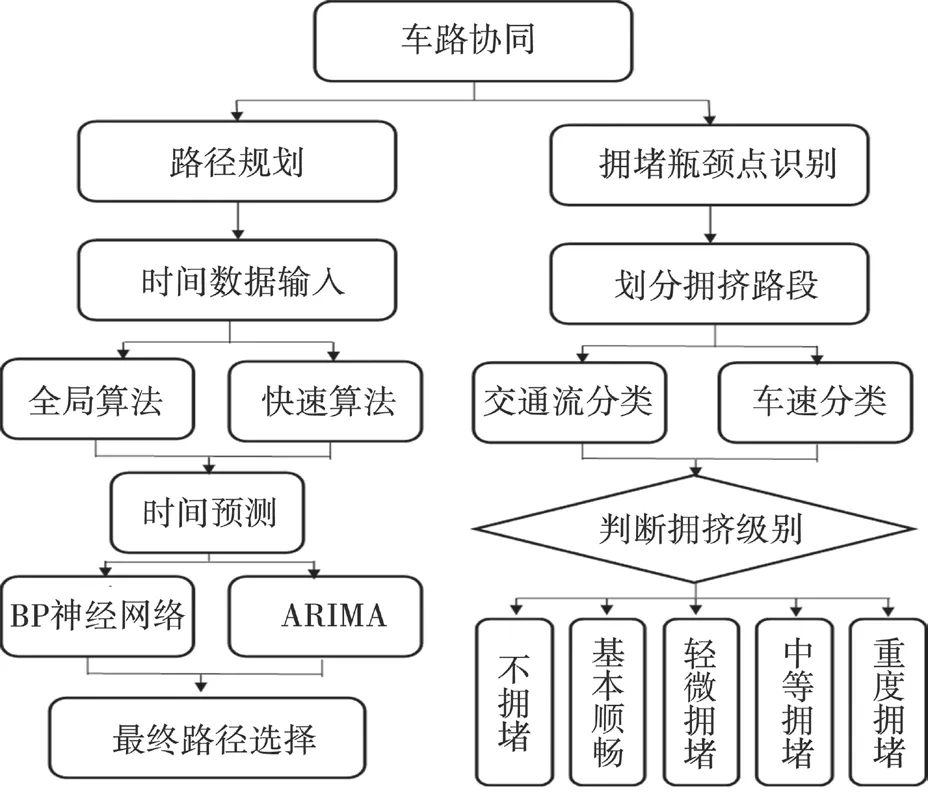
图1 系统构建技术路线
1.2 关键技术分析
车路协同功能系统是通过传感器检测、无线通信等技术获取道路信息见图2。可以实现车与车之间、车与路之间的信息共享,车与车之间的智能协作,从而可以更充分地利用系统资源,减少道路上多余车辆的占用,提高车辆在道路上行驶时的交通安全以缓解交通拥堵。智能侧路技术是路边系统将内置多种通讯模式,提供各种传感器接口(信号、探测器)和本地地图服务,并提供信号定时信息和周边移动目标信息服务。另外,拥塞瓶颈识别技术也是实现车路协同的重要关键技术之一。当交通流量增大时,在瓶颈点处开始出现交通拥堵。该路段的实际通行能力逐渐下降,拥堵向上游扩散。当出现交通瓶颈时,瓶颈与其下游之间存在明显的速度差。采用邻聚类算法对速度和交通流进行分类,并识别拥堵程度,从而可以获得交通瓶颈位置。当对路况分析完毕之后,需规划行车路线,可利用BP 神经网络模型和ARIMA 模型分别对出行时间进行预测,利用出行时间长短对路径进行判断,从而实现最优路径的选择。

图2 车路协同功能系统
2 车路协同功能分析
2.1 功能实现
2.1.1 确定拥堵点的位置
该功能主要使用邻聚类算法对实时车辆速度和交通进行分类,从而判断拥堵程度。首先,利用主成分分析法对原始数据进行线性变换进行降维,得到与路段拥堵情况相关的主要特征值。为了更好地描述路段的拥堵状态,可从主要特征值中选取该路段的实时交通流和车速并进行KNN 聚类。根据聚类结果,划分出五种交通状态:平稳、基本平稳、轻度拥堵、中度拥堵和严重拥堵。该系统检测瞬时交通状况,然后通过聚类得到实时重拥堵路段。可以快速判断路面、发生交通事故的路段或其他意外情况发生的路段的施工范围。无论是对于瓶颈的研究,还是对于交通事故的快速处理,都具有重要意义。
2.1.2 显示最佳行车路径
实现该功能需要3 个步骤:实时数据导入、出行时间预测和最优路径选择。通过GPS 定位技术,可以找到当前车辆位置,计算出行驶轨迹,导入前段各收费站的样本刷卡数据,采用每5 min 抽取10个刷卡样本的方法,刷卡数据主要包括车辆进出车流ID、车辆进出收费站时间。根据之前导入的数据,通过ARIMA 模型和BP 神经网络模型,分别预测通过每条路径所需的时间,并比较两种模型的预测结果以进行下一个最佳路径选择。
2.2 算法分析与比较
实现车路协同的主要算法包括ARIMA 模型和反向传播神经网络模型。ARIMA 模型主要是通过差分积分移动平均自回归模型以进行时间序列预测分析。在ARIMA(p,d,q)中,AR为自回归,p为自回归项的数量,MA为滑动平均,q为滑动平均项的个数,d为使其成为平稳序列的差异数。反向传播神经网络是用误差反向传播算法训练的一种多层前馈神经网络,它是目前应用最广泛的神经网络。在正向传输过程中,输入信号从输入层到输出层被逐层处理。每层神经元的状态只影响下一层神经元的状态。如果输出层不能得到期望的输出,就会变成反向传播,根据预测误差调整阈值和网络权值,使预测值不断接近期望值。
2.3 优化路径搜索
根据前一步预测的出行时间选择最优路径。(1)导入车辆实时驾驶数据。根据BP 神经网络模型,得到了不同路段的预测出行时间。结合交通信号配时和路线转向信息,考虑车辆通过交叉口可能遇到的非自由通行的通行情况,动态计算当前路段的道路阻力值。基于模糊综合评判法,在考虑通畅性和稳定性的情况下,确定了车辆与道路协调的指标,通过行车率和事故系数实时测量得到实际曲线。(2)将该曲线与现有道路类型的标准曲线进行比较,定量地描述标准曲线与实测曲线之间的归一化程度。在此基础上,对匹配度和事故率进行模糊化处理,并根据控制成本从实际情况到相应道路的最佳路径系数建立模糊逻辑。(3)给出车辆-道路协调指标作为控制策略生成的依据。根据现有的道路阻力统计数据和区域路网拓扑结构,实时预测各备选路线的出行时间。(4)选择出行时间最小的路径作为车辆的最优路径。
3 结语
车路协同为缓解城市道路交通拥堵提供了思路。提出了一种基于车路协调思想的短期交通规划与预测系统。利用车路协调的思想,浮动车辆GPS数据,KNN 聚类算法,ARIMA 模型和BP 神经网络模型,可以检测出当前的道路拥堵情况,为交通路线规划提供可行的解决方案,是交通数据挖掘在交通管理中的典型应用。车路协同技术还可以应用于各种应用程序场景。例如,无人驾驶汽车的车路联网安全距离实时评估车辆避障中超车、变道预警并根据实时路况等实现交通灯的提前中断或延长。这些应用可以建立长期有效的分析预警机制,为城市道路拥堵缓解工作提供稳定的技术支撑。
