基于空间光反馈的复合轴跟踪稳定特性研究*
2022-08-02张书哲杨兴昊于思源
陈 阳,张书哲,杨兴昊,于思源
基于空间光反馈的复合轴跟踪稳定特性研究*
陈 阳,张书哲,杨兴昊,于思源
(哈尔滨工业大学 哈尔滨 150001)
复合轴系统通过粗瞄结构和精瞄机构配合,解决了空间光通信大角度和高精度跟踪之间的矛盾,是实现高速率空间光通信的重要手段。但是粗瞄和精瞄配合工作也给复合轴系统带来了复杂的解耦问题,使整个系统的鲁棒性降低,在跟踪速率变化较快的目标时,容易出现振荡,甚至使系统处于不稳定状态。以复合轴系统为研究基础,通过伯德图对系统的跟踪带宽、精度和稳定性进行分析,得到解耦过程是影响复合轴系统稳定性的主要原因。提出了基于跟踪微分器的线性自抗扰复合轴控制解耦方案,在保证系统精度的情况下,抑制系统在解耦过程中可能出现的振荡发散现象。在卫星轨道模拟平台上进行复合轴跟踪实验,实验结果证明,在最大角加速度0.32°/s2的轨道运动和最大角加速度2.26°/s2的微振动情况下,改进复合轴控制有效地提高了系统跟踪的稳定性,最终跟踪精度优于1 μrad(3σ)。
空间光通信;PAT系统;复合轴控制;系统稳定性
引 言
与传统的微波通信相比,空间光通信具有体积小、重量轻、速率高等优点,因此,空间光通信对于构建空天地通信骨干网络、促进卫星组网等具有重要意义[1–3]。使用能量集中、束宽极窄的激光作为通信载体使空间光通信具有明显优势,但是这同时也对空间光通信的链路保持提出了严峻的挑战。为了实现空间光通信链路的稳定,高精度的瞄准、捕获和跟踪PAT(Process Analytical Technology)技术得以发展。为了实现高精度的光束指向,PAT系统通过粗瞄机构和精瞄机构复合的复合轴指向系统进行光束跟踪,其中,粗瞄机构用来保证大范围的光束粗略指向,精瞄机构保证小范围内光束的精确指向[4]。研究粗瞄机构和精瞄机构在PAT系统工作时的配合方法,即复合轴控制策略,是实现高精度指向跟踪的重要内容。
目前,激光通信终端朝着小型化、低成本发展,在PAT系统中往往也采用单探测器类型的复合轴控制方案。单探测器型复合轴控制技术作为空间光通信链路跟踪的重要手段,国内外对其控制策略进行了深入研究[5,6]。美国在光通信演示OCD(Optical Communication Demonstration)系统中通过精瞄机构补偿粗瞄机构跟踪残差的方式构建了复合轴控制系统,在此系统中探测器不接收经过精瞄机构偏转后的光信号,所以精瞄机构开环工作,具有稳定性隐患。但是在此计划中,采用了电荷耦合元件CCD(Charge Coupled Device)二开窗结构,提高了CCD探测器的采样频率[7]。欧空局在SILEX计划中采用QD作为光探测器与精瞄机构构成闭环,粗瞄机构并不直接接收光探测器的信号,而是通过对精瞄机构进行偏角检测,当精瞄机构的角度到达一定范围时对粗瞄机构发出卸载指令,保证精瞄机构在零位附近工作,同时可以进行较大角度的跟踪[8,9]。
与双探测器类型的复合轴系统相比,单探测器类型的复合轴系统具有体积小、结构简单、安装复杂性低、稳定性高等特点,但也由于粗瞄机构和精瞄结构共用一个探测器,会给控制系统带来复杂的解耦问题[10]。执行机构的输入耦合使系统的鲁棒性降低,容易出现发散振荡现象,不利于空间光通信链路长时间稳定工作,前期的卫星激光通信在轨试验中在角加速度较快时均出现了相关现象。
前期对于单探测器型复合轴控制的研究中,一般在动态范围下可以实现优于1 μrad~3 μrad(3σ)的跟踪效果[11–18]。但是由于复合轴控制系统十分复杂,研究内容多集中在其功能实现上,对于其解耦过程与稳定性内在关联的研究较少。本文结合组成复合轴的粗精瞄特性,基于跟踪微分器及线性自抗扰控制改进了复合轴跟踪解耦过程,其中跟踪微分器用于精瞄至粗瞄的解耦,线性自抗扰及线性扩张观测器LESO(Liner Extended State Observer)用于设计粗瞄带宽及扰动观测,通过此算法设计可以有效解决粗瞄、精瞄的解耦问题,并在一定程度上提高了系统的稳定性。通过搭建实验系统,模拟轨道及星上微振动情况进行了复合轴跟踪实验,实验结果表明其跟踪精度优于1 μrad(3σ),并有效抑制了复合轴系统在高变化速率时的振荡现象。
1 单探测器型复合轴控制系统
1.1 系统模型
单探测器型复合轴控制系统的粗瞄系统和精瞄系统之间具有很强的耦合性,一般由粗瞄机构控制主天线角度偏转,精瞄机构控制光束精确偏转实现入射光束的接收。其系统结构及控制如图1所示。

图1 单探测器型复合轴系统结构及控制框图
通过图1(b)可以得到系统的传递函数如下:



通过闭环传递函数分析,单探测器型复合轴系统闭环传递函数由精瞄系统主导,但是附带了粗瞄系统和精瞄系统乘积的耦合项,所以与单纯的精瞄系统或者粗瞄系统相比,复合轴系统复杂性显著提高。
1.2 系统带宽和稳定性分析
选取典型的粗瞄机构和精瞄机构构建单探测器型复合轴控制系统,伯德图如图2所示。

图2 单探测器型复合轴系统控制系统伯德图
通过伯德图可以看出,单探测器型复合轴控制系统的伯德图和精瞄系统的伯德图基本一致,但是在中低频段受到粗瞄机构的影响,使得系统的稳定裕度有所降低。所以粗瞄机构在低频段可以带来大角度的跟踪效果,但是其在中低频段产生的噪声干扰也会对整个复合轴控制系统带来负面影响,是复合轴系统在加速度较快时产生振荡乃至发散的主要原因。
通过单复合轴复合控制系统的控制框图可以得到其误差传递函数为:

同时也可以单独计算出精瞄系统的误差传递函数为:

根据误差函数绘制粗瞄系统、精瞄系统以及复合轴控制系统的传递函数绘制伯德图如图3所示。通过伯德图分析可得,与单纯的精瞄系统相比,粗瞄系统的加入,使系统在低频段对干扰的抑制能力增加,但是在中低频段抑制能力有所降低。这主要是由于粗瞄机构在中低频段时引入了噪声,所以传统的解耦办法会在解耦过程中加入低通滤波器使粗瞄机构运行在低频状态,去除或降低引起粗瞄机构产生噪声的中高频输入量。但是仅仅减少输入噪声不仅会使精瞄工作压力上升,而且无法解决粗瞄机构引出中低频噪声的问题。所以除了对精瞄机构和粗瞄机构进行精心设计之外,选取合适的解耦过程对于复合轴控制系统的跟踪精度有十分重要的影响。合适的解耦过程可以有效降低粗瞄机构在中低频段对于跟踪效果的负面影响,从而提升整个系统的跟踪精度。

图3 单探测器型复合轴系统误差伯德图
2 基于跟踪微分器的线性自抗扰复合轴控制方法
通过复合轴系统带宽及稳定性分析可以看出,影响系统跟踪精度及稳定性的主要因素是精瞄偏角发送给粗瞄过程中引入的控制信号噪声和粗瞄跟踪过程中产生的中低频噪声。跟踪微分器是韩京清研究员提出的一种非线性微分跟踪器[19],可以对输入信号进行滤波并求其微分信号,可以有效滤除输入信号的噪声。线性自抗扰控制是高志强教授在韩京清研究员提出的自抗扰控制基础上的改进形式[20,21],其扰动观测器可以对外部输入干扰噪声进行观测,同时可以采用带宽整定法对粗瞄机构带宽进行合理设计,使解耦过程对系统的稳定性产生的影响最小,提高整个复合轴系统的鲁棒性。
跟踪微分器基本形式如式(6)~式(8)所示。


本文采用跟踪微分器对精瞄机构的偏角反馈信号进行低通滤波,同时采用其微分输出作为前馈控制量控制粗瞄机构运动,则基于跟踪微分器的复合轴控制图如图4所示。

图4 基于TD过程的线性自抗扰复合轴控制框图
通过TD构成复合轴控制的解耦过程可以有效滤除精瞄机构位置偏角中的高频噪声,使粗瞄机构在运行的过程中不必产生额外的噪声干扰,同时减少因滤波带来的相位延迟。其微分输出作为前馈信号提高了粗瞄机构的动态能力。
在粗跟踪的位置环采用线性自抗扰控制方案,由于在解耦过程中已经采用了TD,所以不必再安排过渡过程。采用带宽整定的方式完成对于粗瞄机构位置环控制,可以将粗瞄机构产生的中频噪声进行合理安排,使其产生的影响最小。
其观测器带宽可以通过特征方程设计进行设计,特征方程如下:

而系统的控制设计为理想二阶系统的形式,则可以通过带宽法对系统闭环传递函数进行如下设计:

3 实验结果
在实验室搭建卫星平台模拟系统对基于空间光探测器的复合轴控制系统性能进行测试,实验验证系统如图5所示。通过平行光管构建远场光束模拟,通过模型模拟控制器控制二维转台和振动台实现对于卫星轨道、姿态以及微振动的模拟。PAT控制器则负责实现粗瞄机构和精瞄机构的指向以及复合轴控制算法等。
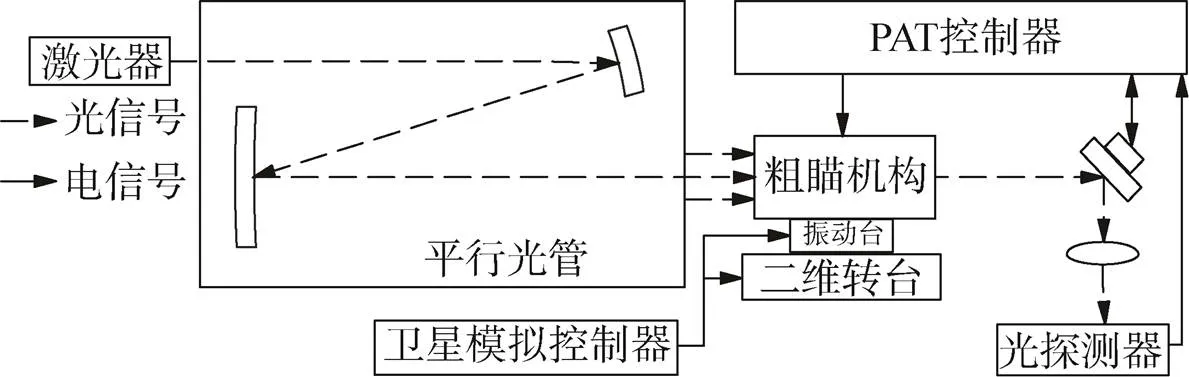
图5 单探测器复合轴系统实验结构图
在实验中通过卫星模拟控制器控制二维转台执行0.2°@0.2 Hz的正弦运动,实现对于卫星轨道的仿真,同时控制振动台做10 μrad@10 Hz的正弦运动,实现对于卫星平台微振动的仿真,其控制输出如图6所示。在卫星模拟平台上,分别采用传统复合轴控制方案和改进的复合轴控制方案进行跟踪实验,实验结果如图7所示。

图6 卫星轨道及微振动模拟曲线

图7 复合轴控制系统跟踪残差曲线
实验结果表明,仅使用低通滤波器的传统复合轴系统的跟踪能力误差在2 μrad(3σ)左右,改进复合轴系统的跟踪误差优于1μrad(3σ)。改进的复合轴控制系统首先通过TD过程实现了对于解耦信号的滤波,同时其微分输出作为前馈也提高了粗瞄机构的动态能力。其次通过带宽整定法整定的线性自抗扰控制方法使粗瞄结构的带宽安排在相对较低的频段,降低其输出噪声对精瞄机构跟踪的影响。通过实验结果分析,红框选中部分为轨道运动加速度最高的阶段,在此阶段传统的复合轴控制方案对轨道扰动的抑制效果较差,而改进的复合轴控制方案可以使跟踪精度保持和轨道匀缓过程的跟踪精度基本一致,有效地提高了系统的跟踪精度和稳定度。
4 结束语
本文对空间光反馈的复合轴系统稳定性进行研究,以复合轴控制系统的特点为基础,通过系统伯德图,对复合轴控制系统的带宽、精度以及其稳定性进行分析。通过理论分析得出影响复合轴系统稳定的主要原因是解耦过程中粗瞄产生的中低频噪声,这部分噪声部分来源于信号输入,另外一部分则是系统固有输出。基于上述分析,提出了基于TD过程的线性自抗扰解耦方案,在信号输入端通过TD过程实现对于输入信号的滤波处理,同时微分信号作为前馈,有效解决传统低通滤波带来的相位延迟问题,使复合轴系统对于输入端干扰具有更高的鲁棒性;选用线性自抗扰控制作为解耦控制输入,对粗瞄机构的带宽进行合理设计,使其输出噪声对系统影响最小,提高了整个复合轴系统的稳定性。通过卫星模拟平台进行了半实物模拟跟踪实验,实验结果表明,改进的单探测器型复合轴控制方案的最终跟踪精度为1 μrad(3σ),在角速度较快时,有效地保证了复合轴系统的稳定性。
[1] 高铎瑞, 谢壮, 马榕, 等. 卫星激光通信发展现状与趋势分析(特邀)[J]. 光子学报, 2021, 50(4): 9–29.
GAO Duorui, XIE Zhuang, MA Rong, et al. Development current status and trend analysis of satellite laser communication(Invited) [J].Acta Photonica Sinica, 2021, 50(4): 9–29.
[2] 刘向南, 李春才, 李晓亮, 等. 天地一体化信息网络空间激光通信新技术[J]. 遥测遥控, 2019, 40(1): 1–7.
LIU Xiangnan, LI Chuncai, LI Xiaoliang, et al. New technologies of space laser communication for the space-ground integrated information network[J]. Journal of Telemetry,Tracking and Command, 2019, 40(1): 1–7.
[3] 蔡凤福. 天地一体化信息网络空间激光通信新技术研究[J]. 通讯世界, 2020, 27(7): 57–58.
[4] XU S, HAN J. Design and analysis of ATP compound axis control system for intersatellite optical communication[C]//2018 IEEE 4th International Conference on Control Science and Systems Engineering (ICCSSE): 312–316.
[5] 闫爱民, 周煜, 孙建锋, 等. 卫星激光通信复合轴光跟瞄技术及发展[J]. 激光与光电子学进展, 2010, 47(4): 1–6.
YAN Aimin, ZHOU Yu, SUN Jianfeng, et al. Technology and progress of compound-axis pointing in satellite laser communication[J].Laser & Optoelectronics Progress, 2010, 47(4): 1–6.
[6] 马佳光, 唐涛. 复合轴精密跟踪技术的应用与发展[J]. 红外与激光工程, 2013, 42(1): 218–227.
MA Jiaguang, TANG Tao. Review of compound axis servomechanism tracking control technology[J].Infrared and Laser Engineering, 2013, 42(1): 218–227.
[7] RUSSELL D, ANSARI H, CHEN C C. Lasercom pointing, acquisition, and tracking control using a CCD-based tracker[C]//Free-Space Laser Communication Technologies VI. SPIE, 2123: 294–303.
[8] NIELSEN T T. Pointing, acquisition, and tracking system for the free-space laser communication system SILEX[C]//Free-Space Laser Communication Technologies VII. SPIE, 2381: 194–205.
[9] CALZOLAIO D, CURRELI F, DUNCAN J, et al. EDRS-C : The second node of the European data relay system is in orbit[J]. Acta Astronautica, 2020, 177: 537–544.
[10] 杨松涛, 和丽清. 单探测器型复合轴系统设计中的若干问题[J]. 激光与红外, 2020, 50(4): 457–462.
YANG Songtao, HE Liqing. Some problems of the design of compound-axis servomechanism using single detector[J]. Laser & Infrared, 2020, 50(4): 457–462.
[11] WU W, CHEN M, ZHANG Z, et al. Overview of deep space laser communication[J]. Science China Information Sciences, 2018, 61(4): 040301.
[12] ARAI K. Development and on-orbit experiment results of optical inter-orbit communications engineering test satellite (OICETS)“KIRARI”[J]. IEICE Communications Society Magazine, 2007, 2007(3): 54-63.
[13] 于思源, 高惠德, 王立松, 等. 卫星光通信复合轴跟瞄控制方法研究[J]. 激光技术, 2002(2): 114–116.
YU Siyuan, GAO Huide, WANG Lisun, et al. Multiple-axis pointing control in intersatellite optical communication[J].Laser Technology, 2002(2): 114–116.
[14] 王强, 傅承毓, 陈科, 等. 预测轨迹修正单检测型复合轴控制方法[J]. 光电工程, 2007(4): 17–21,38.
WANG Qiang, FU Chengyu, CHEN Ke, et al. Single detector compound axis control based on realtime predicted trajectory correcting method[J].Opto-Electronic Engineering, 2007(4): 17–21,38.
[15] 王伟, 刘云清, 董岩, 等. 空间激光通信中复合跟踪技术研究[J]. 激光与红外, 2020, 50(4): 403–406.
WANG Wei, LIU Yunqing, DONG Yan, et al. Research on composite tracking technology in space laser communication[J]. Laser & Infrared, 2020, 50(4): 403–406.
[16] 姜晓明, 王旭烽, 张伟芳, 等. 激光跟瞄系统粗精复合轴协同控制策略优化研究[J]. 空天防御, 2019, 2(3): 31–37.
JIANG Xiaoming, WANG Xufeng, ZHANG Weifang, et al. Coarse-fine compound axis cooperative control strategy optimization for laser tracking & aiming system[J].Air&Space Defense,2019, 2(3): 31–37.
[17] 宋延嵩, 佟首峰, 董岩, 等. 基于现场可编程门阵列单探测器复合轴控制技术[J]. 光子学报, 2014, 43(4): 28–34.
SONG Yansong, TONG Shoufeng, DONG Yan, et al. Technique of compound axis control using single detector based on field programmable gata array[J].Acta Photonica Sinica, 2014, 43(4): 28–34.
[18] 蔡美华, 孔德聪, 佟鑫刚. 单探测型复合轴系统粗精指向对准的研究与实现[J]. 光电技术应用, 2019, 34(1): 63–66.
CAI Meihua, KONG Decong, TONG Xingang.Research and implementation of coarse fine pointing alignment for single composite shaft detection system[J].Electro-Optic Technology Application, 2019, 34(1): 63–66.
[19] HAN J. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900–906.
[20] GAO Zhiqiang. Scaling and bandwidth-parameterization based controller tuning[C]// IEEE Proceedings of the 2003 American Control Conference, 2003: 4989–4996.
[21] GAO Z. Active disturbance rejection control: a paradigm shift in feedback control system design[C]//2006 American Control Conference,2006.
Research on tracking stability characteristics of compound-axis based on space light feedback
CHEN Yang, ZHANG Shuzhe, YANG Xinghao, YU Siyuan
(Harbin Institute of Technology, Harbin 150001, China)
Through the cooperation of coarse pointing assemble and fine pointing assemble, the compound-axis system solves the contradiction between large angle and high precision tracking in space optical communication and is an important means to realize high-speed space optical communication. However, the coordination of coarse pointing assemble and fine pointing assemble also brings complex decoupling problems to the compound-axis system, which reduces the robustness of the whole system. When tracking targets with fast-changing speed, it is easy to oscillate, and even make the system in an unstable state. In this paper, the tracking bandwidth, accuracy, and stability of the system are analyzed based on the compound axis system by Byrd diagram, and it is concluded that the decoupling process is the main reason that affects the stability of the compound axis system. A linear auto-disturbance rejection compound axis control decoupling scheme based on tracking differentiator is proposed to restrain the oscillation divergence that may occur in the process of decoupling while ensuring the accuracy of the system. The compound axis tracking experiment is carried out on the satellite orbit simulation platform. The experimental results show that in the case of orbit motion with a maximum angular acceleration of 0.32°/s2and micro-vibration of the maximum angular acceleration of 2.26°/s2, the improved compound axis control can effectively improve the tracking stability of the system, and the final tracking accuracy is better than 1 μrad(3σ).
Space optical communication; PAT system; Compound-axis control; System stability
TN929.1;V443+.1
A
CN11-1780(2022)04-0025-06
10.12347/j.ycyk.20210120002
陈阳, 张书哲, 杨兴昊, 等.基于空间光反馈的复合轴跟踪稳定特性研究[J]. 遥测遥控, 2022, 43(4): 25–30.
10.12347/j.ycyk.20210120002
: CHEN Yang, ZHANG Shuzhe, YANG Xinghao, et al. Research on tracking stability characteristics of compound-axis based on space light feedback[J]. Journal of Telemetry, Tracking and Command, 2022, 43(4): 25–30.
国家自然科学基金“面向空间平台的激光传输系统”(91838302)
于思源(yusiyuan@hit.edu.cn)
2022-01-20
2022-02-21
Website: ycyk.brit.com.cn Email: ycyk704@163.com
陈 阳 1996年生,博士研究生,主要研究方向为卫星光通信捕获跟踪控制技术。
张书哲 1998年生,博士研究生,主要研究方向为卫星光通信编码译码技术。
杨兴昊 1999年生,硕士研究生,主要研究方向为卫星光通信光学设计。
于思源 1974年生,博士,教授,主要研究方向为卫星光通信技术。
(本文编辑:杨秀丽)
