振动式松果采摘机的设计及振动特性分析
2022-08-02谷庆阳李树森
谷庆阳, 李树森*, 杨 非, 陈 群, 南 方
(1.东北林业大学机电工程学院,黑龙江 哈尔滨 150040;2.国家林业和草原局哈尔滨林业机械研究所,黑龙江 哈尔滨 150086)
与人工采摘相比,机械采摘的经济优势显而易见,林业发达国家自20世纪中旬就开始了采摘机械的研究[1]。Gil和Ortiz在2009年计算了不同农业物种的收获频率范围,得出柑橘与杏的最佳振动频率在15 Hz附近,黄荆浆果的有效频率值在15~20 Hz之间,密集性橄榄园的收获频率为28~30 Hz。通过分析得知,树木的动态特性决定了树的其他部分对树干振动的响应以及在此过程中所需要的功率[2-6]。Castro等发现,当使用树干振动的采摘方式时,树木的固有频率会与采摘机的激振频率发生共振现象,从而对树体本身造成损伤。在设计振动采摘机时,一定要考虑树体本身的固有频率[7-10]。刘子龙等针对Y型果树的振动采摘进行了分析,选择了质量-弹性元件系统作为模型,利用MATLAB对模型进行仿真,得出果树在振动时的情况和最适合的采摘频率。其选择的果树三自由度模型能很好地将树的实际情况展现出来,具有一定的参考意义。
本文对红松树的振动特性进行分析,并根据最佳采摘效果的研究结果,设计适合红松松果采摘的振动式采摘机。
1 红松树体三维建模与分析
1.1 红松三维模型网格划分与边界条件设置
利用合理的建模方法将红松树简化为一个单一自由度的圆锥体模型,并根据对红松参数的测量结果建立三维实体模型。35年树龄的红松树高在10~12.5 m,树干直径在150 mm左右,枝干最低高度在6 m左右,红松的物理性能参数如表1所示。

表1 红松树体物理性能参数
松果果梗直径平均为3 mm,其力学性能参数如表2所示。

表2 松果力学性能参数
红松树本身是一个非常不规则的形状,有着较为复杂的结构,为了使分析结果更加精确,在对红松树进行三维实体模型网格划分时,采用了混合四面体与六面体的划分方式,网格精度设置为50 mm,红松树在网格划分后的三维实体模型如图1所示。红松树生长的过程中根系扎进土里较深,所以将红松树的根部视为固定端,而树的上方则视为自由端。红松参数设置如图2所示。

图1 网格划分
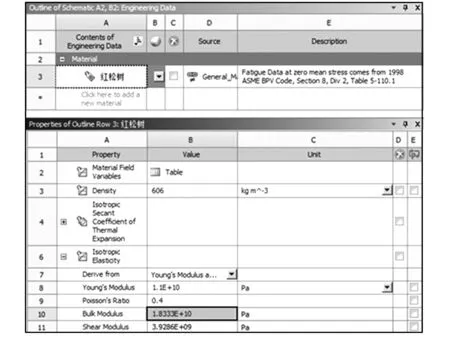
图2 模态分析参数设置
2 红松树体模态特性分析与谐响应分析
2.1 红松树体的模态分析
当采摘机产生振动时,若红松的固有频率与采摘机的频率重合,红松树体便会受到损伤,为了防止这一情况发生,利用模态分析探究红松自身的频率,并观察其振型特征。由于在七阶模态之后红松的固有频率基本不变,所以,在前七阶中筛选出较为明显的三个不同阶数的模态分析结果图,如图3所示。

图3 红松树体的各阶模态图
通过对各阶模态的分析可以发现,红松树体的各阶固有频率分别为8 Hz、15 Hz、17 Hz,并得出在8 Hz时,红松下侧一、二级枝干发生摆动;在15 Hz时,红松上侧的二级枝干发生左右摆动;在17 Hz时,红松果梗处发生摆动。
2.2 红松树体的谐响应分析
为了使采摘机既能有好的采摘效果,又能对树木造成较小的损伤,本文通过对红松树进行谐响应分析,设置不同大小的力与不同的夹持高度来观察红松树的变形情况,并分析红松果实的拉断力,找到最佳夹持位置、力和频率,谐响应分析项目图如图4所示。

图4 谐响应分析项目图
本文将夹持高度范围设置为4 000~6 000 mm,激振力大小设置在2 000~4 000 N,针对不同激振高度以及不同激振载荷对红松树振动特性的影响进行分析,得到不同激振高度与激振频率时树体的变形图,夹持高度为5m时的变形图如图5所示。

图5 夹持高度为5 m处时红松变形图
通过对研究结果的分析,松果果梗所受的应力达到峰值时的频率为18 Hz,如图6所示。所以,需对频率为18 Hz时的夹持高度与振动载荷进行研究。

图6 应力变化关系图
根据对果梗特性的分析得知,红松果梗的平均直径为3 mm,其拉断力范围在120~130 N之间。
为了使采摘效果更好,需找到满足条件的激振力与激振高度,本文对能满足拉断应力条件下的夹持高度与载荷进行了分析,结果如图7所示。
通过对图7的分析发现,夹持高度在4 500~5 500 mm,激振载荷在2 500~3 500 N之间时,采摘效果较好,自然生长的红松各个枝干的物理参数均不相同,不同红松之间也存在着差异。本文对树龄35年的红松进行研究,此时的松树趋于成熟,其特性差距不明显,虽然有一定的数据偏差,但基本可以忽略不计,因此具有代表意义,可以作为大多数红松的参考对象。

图7 激振频率18 Hz的应力关系图
综上所述,通过对红松的谐响应分析,确定了采摘机所需激振频率为18 Hz,采摘机夹持高度范围在4 500~5 500 mm之间,采摘机激振力大小在2 500~3 500 N之间时,振动采摘机可以达到较好的采摘效果。
3 红松果实脱落条件分析
对松果振落的条件进行分析有利于采摘机的设计。本文利用一个具有质量的椭球模型替代松果,并将松果在红松振动时所做的运动视为单摆运动,果梗作为其单摆线,其与枝干的连接视为柔性连接,从而建立果实动力学模型进行研究,振动过程中松果受力示意图如图8所示。

图8 果实动力学模型
其中,果梗与枝干之间的结合力为F,果梗与枝干的夹角为θ,松果受到的法向惯性力为Fn、切向惯性力Fr,果梗长度为l。
根据图8中松果的动力学模型,对松果法向惯性力与切向惯性力进行计算,得到公式:
(1)
(2)
式中:an为振动过程中松果的法向加速度;ar为振动过程中松果的切向加速度。
松果与果梗之间的结合力相比于果梗与枝干之间的力大很多,所以松果在被振落时,主要是果梗与枝干之间发生断裂,因此这里主要对松果所受的法向惯性力进行研究,当松果掉落时,松果所受到的法线方向的力应满足:
Fn+Gn>F
(3)
式中:Gn为松果沿法线方向的重力分力,N。
红松果实的重量相对与振动所产生的力来说很小,因此其重力在法线方向的分量可以忽略不计,松果发生脱落的公式可以简化为:
Fn>F
(4)
通过对松果脱落条件的分析发现:松果运动过程中Fn>F时,松果便会脱落,而角速度将影响法线方向惯性力的数值。利用激振装置产生振动的振幅与频率增加松果运动的角速度,便能更好地完成采摘。根据已有文献可知:在振幅为10 mm时松果的采摘效果最好[11]。
由此可得出结论,振动产生的振幅与频率将直接影响松果的采摘,采摘机的激振机构要提供将松果振落的振幅与频率才能完成采摘工作。这一结论为采摘机的合理设计提供理论支撑。
4 振动式松果采摘机结构设计
本文针对红松树的生长情况,设计了便于在多种复杂路况行走的振动式红松松果采摘机,主要由移动装置、升降装置、激振装置、夹持装置等组成,采摘机整体结构如图9所示。

图9 采摘机结构示意图1.车体;2.回转装置;3.支撑液压杆;4.回转圆盘;5.升降液压杆;6连接座;7.支撑架;8.铁链;9.支撑轴;10.偏心轮;11.液压缸;12.采摘夹手;13.固定支座;14.激振框架;15.汽油机
其中,松果采摘机的移动装置由履带车1和回转装置2构成,为采摘机提供所需的动力同时,回转机构能带动升降装置旋转,具有更好的灵活性;升降装置由支撑液压杆3、回转圆盘4、升降液压杆5、连接座6、支撑架7、铁链8构成,主要负责将执行机构安放到指定位置;激振装置主要由支撑轴9、偏心轮10、激振框架14、汽油机15构成,负责产生振动并将果实振落完成采摘;夹持装置由液压缸11、采摘夹手12、固定支座13构成,夹持装置的主要作用为夹紧树干不发生移动,并尽可能保护树木不受损坏,本文设计的夹爪环抱树干,与树干具有更大的接触面积,能在夹紧树干的同时减少对树的损伤。
根据红松树振动特性分析可得到采摘机的设计参数,由计算得知:偏心轮圆弧半径为81 mm、轴径为18 mm;夹持装置可对80~180 mm直径的树干进行夹持,液压缸行程为15~340 mm;升降装置的升降范围在3~6 m。
5 结论
(1)通过对红松树模型的模态分析,得到了红松树的固有频率与不同频率的振型特征。
(2)通过对红松树谐响应分析得知:红松树的最佳激振频率为18 Hz、夹持高度在4 500~5 500 mm之间,激振力的大小在2 500~3 500 N之间。
(3)根据对红松树振动特性的分析,设计了振动式松果采摘机,振动机构偏心轮圆弧半径为81 mm、轴的轴径为18 mm;夹持装置可对直径为80~180 mm的树干进行夹持,液压缸行程为15~340 mm;升降装置升降范围在3~6 m,最佳激振频率为18 Hz,夹持高度在4 500~5 500 mm之间,激振力在2 500~3 500 N之间。