H型直流脉宽调速系统的设计与研究
2022-08-02马勇陈由锋杨槐谢承希罗雪芳
马勇,陈由锋,杨槐,谢承希,罗雪芳
(1.重庆交通建设(集团)有限责任公司,重庆,400000;2.新疆兵团水利水电工程集团有限公司,新疆乌鲁木齐,830000)
0 引言
在的H型直流脉宽调速系统当中,通过使用H型双极式的可逆脉宽调制变换器,得到调速系统中直流电动机的电枢端的电压。这是与常见的双闭环直流调速系统的不同之处,但是H型直流脉宽调速系统与常见的双闭环直流调速系统的共性是作为外环的ASR和作为内环的ACR在工作过程与普通双闭环直流调速系统是相同的。其中,作为外环的转速调节器为了保证系统的转速精度和转速恒定,能有效的消除转速误差。而内环的电流调节器是为了限制过大的启动电流和过载电流,保证电动机能快速启动。
在普通的双闭环直流调速系统中,电动机的电枢电压通常采用全控型的晶闸管构成的整流桥经过整流获得或者使用脉冲触发器获得,而在的H型直流脉宽调速系统当中,通过使用H型双极式的可逆脉宽调制变换器,得到调速系统中直流电动机的电枢端的电压,以此来实现调速系统的平滑调速。
1 H型双极式的可逆脉宽调制变换器的组成及工作原理
1.1 H型双极式的可逆脉宽调制变换器的组成
H型脉宽调制变换器电路构成是4个全控型器件和4个不可的控续流二极管。H型可逆变换器按照控制方式的差异和不同,通常可以分为受限单极式、单极式、双极式等多种类型。文章中仿真中使用到的双极式H型可逆脉宽调制变换器,是普遍常见到的一种,也是使用最广泛的一种。电路是由4个全控型器件的基极驱动,使得电压被分为两组,电路整体看上去呈现为中心对称结构。其基本电路如图1所示。
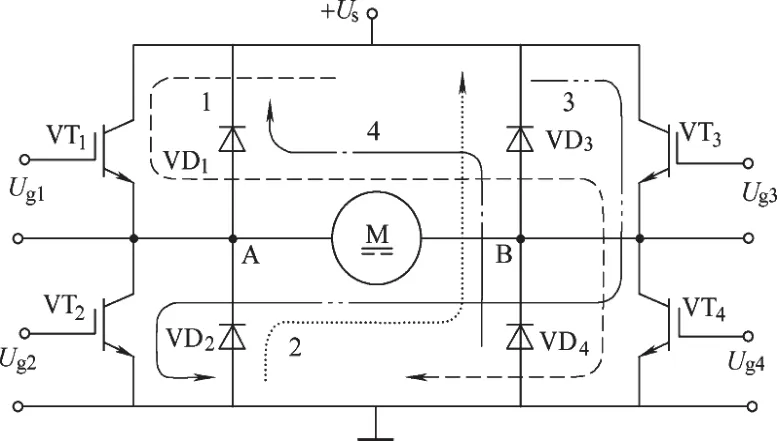
图1
1.2 H型双极式的可逆脉宽调制变换器的工作原理
如图2所示,ton为可控型器件的开通时间,在一个完整开关周期T内,当0≤t≤ton时,由图2可以看出,全控型器件VT1、VT4饱和开通,此时全控型器件VT2、VT3截止,这时电枢两端的电压UAB等于电源电压US,电枢电流id沿着回路:+US→VT1→电动机电枢→VT4→-US流通;当ton≤t≤T时,驱动电压相反,全控型器件VT1、VT4截止关断,但此时全控型器件VT2、VT3不能立刻导通,电枢电流id沿着回路2,经续流二极管VD2和VD3进行续流,这时电枢两端的电压UAB等于负的电源电压-US。在一个周期T内,电枢电压UAB具有正、负交替的脉冲波形,这也是双极式脉宽调制变换器电路工作时的都有特性。其电压、电流波形如上图2所示。

图2
电动机的旋转方向是由驱动电压的正、负脉冲的宽和窄来决定的。当正脉冲较为宽时,即ton>T/2,则电动机电枢电压UAB的平均值为正,此时电动机正向旋转。同理,当正脉冲较为窄时,即ton<T/2,则电动机反向旋转。如果正、负脉冲大小一样时,即ton=T/2,电压的平均输出值为零,此时电动机停止转动。
2 系统设计
2.1 H型双闭环直流脉调速系统结构图
如图3所示,UR为整流器、UPEM为桥式可逆电力电子变换装置、UPW为PWM波生成环节、ASR为转速调节环、ACR为电流调节环、GD为驱动电路、TG测速发电机。
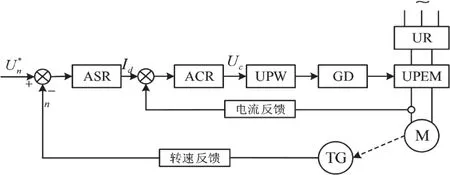
图3 H型双闭环直流脉调速系统结构图
2.2 H型双闭环直流脉调速系统设计框图
如图4为H型双闭环直流脉调速系统动态结构图,按图依次为:转速延迟环节、ASR、电流延迟环节、电流调节器、脉宽调制环节、转速反馈环节、电流反馈环节。其中延时环节作用是,让给定的输入信号和经反馈电路反馈后的信号经过相同的延时,使两者在时间的利用上得到很好的配合。而转速调节器、电流调节器的功能同普通双闭环调速系统一致。
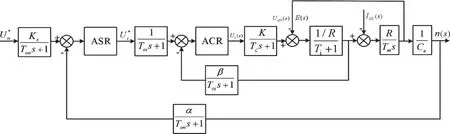
图4 H型双闭环直流脉调速系统设计框图
3 H型双闭环直流脉宽调速系统仿真参数设定及模型建立
3.1 H型双闭环直流脉宽调速系统仿真模型的组成
H型双闭环脉宽调制直流调速系统的组成为:给定阶跃信号Step模块、转速延迟模块、转速调节器模块、电流调节器模块、电流延迟模块、脉宽调制发生器、Universal Bridge模块、直流电动机模块、负载模块、电源模块、转速反馈系数模块、电流反馈系数参数模块、示波器模块等。
3.2 H型双闭环直流脉宽调速系统模块介绍
3.2.1 脉宽调制变换器模型
如图5所示,脉宽调制变换器模型采用两个PWM Generator模块经电气封装后得到。
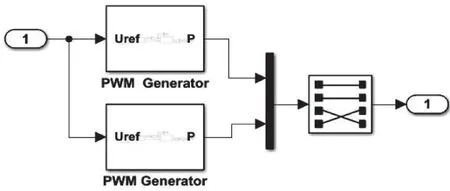
图5 脉宽调制变换器模型
3.2.2 桥式模块
H桥模块选用Universal Bridge模块(见图6),该模块于直流电机串联使用。
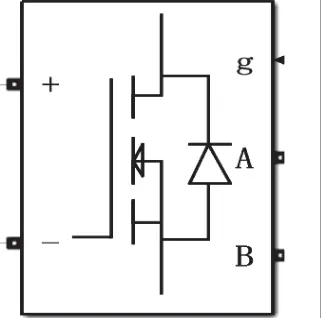
图6 Universal Bridge H桥式模块
3.2.3 直流电动机模块
图7为直流电机模块,总共有6个电气接线端子,其中TL是负载转矩的电气接线端子、m为电动机输出接线端子、F+和F-是连接电动机励磁绕组的电气连接端子,A+和A-是电枢连接的电气端子。其中输出端子m可以输出电机内部的一系列信号。

图7 直流电机模块
3.3 H型双闭环直流脉宽调速系统模型重要参数的设定
Step模块参数设置分别为2.5和5;转速调节器ASR模块的Kp=5.4,Kn=1/0.04;电流调节器ACR的Kp=4.63,Ki=1/0.015s;PWM发生器采用两个PWM Generator模块;模块的载波Frequency设置为1kHz;Selector模块输入信号的指定元素Index Option 设置为[1 2 4 3];H桥模块选用Universal Bridge模块,该模块于直流电机串联使用,其参数设置为:Number of bridge arms为2,Power Electronic device为MOSFET/Diodes,其他参数为模型的默认值;转速反馈模块参数为:分子(Numerator)数值为[0.05],分母(Denominator)数值为[0.005 1];电流反馈模块参数设置: 分子(Numerator)数值为[1.35],分母(Denominator)数值为[0.001 1];直流电机模块参数设置为:PN=1000W,UN=48V,IN=3.7A,nN=200r/min,允许电流过载倍数λ=2;电磁时间常数为Ti=0.015s,电常数为:Tm=0.2sCe=0.12,If=0.92A,Iaf=1.246其他参数为模块默认值;直流电源参数为48V;仿真中,算法设置为:ode23tb(stiff/TR-BDF2),Start time到Stop time设置为0~12s。
■ 3.4 H型双闭环直流脉宽调速系统仿真模型
H型双闭环直流脉宽调速系统仿真模型如图8所示。
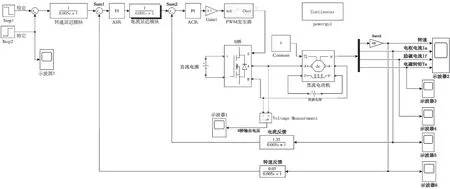
图8 H型双闭环直流脉宽调速系统仿真模型
■ 3.5 H型双闭环直流脉宽调速系统仿真波形
当step time的值为2.5和5时,脉宽调制发生器波形、桥式电路输出电压波形、以及直流电机转速波形、电枢电流波形、电磁转矩波形分别如图9~图13所示。
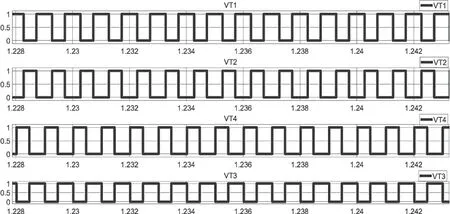
图9 脉宽调制发生器波形

图10 桥式电路输出电压波形

图13 双闭环直流脉宽调速系统电磁转矩曲线
4 结论
在H型的双闭环直流脉宽调速系统当中,根据图11转速波形和图12电流波形可以分析得出,当给定信号为10V时,在启动过程受到ACR的影响,电动机电枢电流接近最大值6A,使得电动机的转速快速上升,其中最高转速205r/min,当系统稳定时转速为200r/min;电流为3.5A。2.5s后给定信号变成-10V时,电动机速度逐渐下降。当转速过零后,电动机开始反向运转,达到稳定状态时的转速为-200r/min(负号表示转动方向)。从设计的H型双闭环直流脉宽系统可以看出,在启动过程中转速是稳步上升的,转速达到稳定状态后,转速一直为恒定值并没有突变的情况出现,系统在工作过程中表现为转速上升快,动态响应快。设计的系统基本和给定的直流电机的转速和电流参数一致,说明了该系统设计的合理性、正确性。
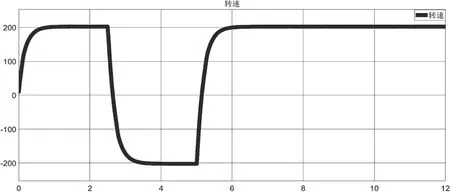
图11 双闭环直流脉宽调速系统转速曲线

图12 双闭环直流脉宽调速系统电枢电流曲线