航空发动机FADEC系统的喘振自动标定技术
2022-08-02吴远盛郑斐华
0 引言
随着航空产业的迅速发展,对航空发动机的安全性和可靠性要求越来越高。发动机喘振故障作为一种多发故障,是航空发动机的一种不稳定工作状态,是气流沿压气机轴线方向发生的低频率、高振幅的振荡现象。它会导致发动机机件的强烈机械振动和热端超温,并在很短的时间内造成机件的严重损坏,严重危及飞行安全
。因此近年来已日渐成熟的全权限数字电子控制系统(Full Authority Digital Electronic Control,FADEC)
都通过数字化电路在发动机即将出现喘振或喘振初期,及时准确的识别出喘振,进而采取相应的消喘措施,避免发动机由于喘振处理不及时导致出现严重故障。
FADEC数控系统中的数字电子控制器通过获取喘振传感器的采集值进行发动机喘振状态的判断。要保证控数字电子控制器能及时准则的判断出发动机的喘振状态,要求喘振传感器具有较高的测量精度。但随着喘振传感器使用时间的增加,其测量值会发生漂移,且漂移程度会随着时间的增加而增大
,导致数字电子控制器无法及时准则的判断发动机喘振状态。如果喘振传感器出现了一定的漂移,传统的方法是对喘振传感器重新标定,但该方法存在维护成本高且无法精确判断何时对喘振传感器重新标定的缺点。
步骤1:初始化候选断点集,令CUT={Caj︱j=1,2,…,m},其中Caj为条件属性aj的候选断点集。
本文描述了已交付外场大量使用的某型发动机,在外场使用过程中,由于喘振传感器的漂移导致数字电子控制器无法准确的判断发动机喘振状态。根据数字电子控制器喘振电路电路以及喘振传感器标定原理,设计了喘振标定电路模型,并根据模型设计了喘振自动标定方法,通过模型仿真和硬件在回路仿真验证了该自动标定算法的有效性,将该自动标定算法落实到了控制软件正式技术状态中,并随发动机在外场使用,使用结果表明,通过数字电子控制器上电后的喘振传感器的自动标定技术,可以解决喘振传感器的自动漂移问题,降低了由于喘振传感器漂移导致无法及时准确判断发动机喘振的风险。
1 喘振处理电路原理
本文描述的FADEC系统的喘振电路原理图见图1。喘振反馈信号经过整流和方向放大滤波调理为含有直流和交流分量的信号V△Pck,V△Pck信号经过反向滤波处理为只有直流分量的V△PckDC,V△Pck信号经过高通滤波处理只有交流分量的V△PckAC。直流分量信号V△PckDC和交流分量信号V△PckAC经过A值判断比较电路进行喘振判断,通过对A值判断产生的脉宽时间进行延时扩展,形成喘振K1。该喘振K1信号可通过控制软件采集,当控制软件采集到喘振K1信号后,在允许消喘条件满足时,会进行相应的消喘控制。消喘控制期间,FADEC发出主燃油切油指令,并对风扇导叶角度、压气机导叶角度以及喷口喉道面积进行偏关或放大调整,同时向飞机发出喘振告警。
自动标定过程中,满足a且b,认为任务拐点标定值已经找到,停止查找:
直流分量信号V△PckDC经过分压电路处理为PckDC_G并通过AD电路采集,PckDC_G信号用于喘振的零点和拐点标定,反应了喘振传感器测量的压差平均值。
交流分量信号V△PckAC经过低通滤波和放大电路处理为PckAC并通过AD电路采集,PckAC信号用于表征喘振传感器测量的压差波动值。
2 喘振标定过程
由于喘振传感器在静态无压差状态下,传感器输出有个小电压,喘振传感器是通过将感受的压力差转化为电压信号输出。为了消除在零压差状态下,传感器的输出小电压,需要通过零点标定的方式,将传感器在零压差状态下,把测量电路中对应压差的直流分量V△PckDC值调为零电压。

3 喘振自动标定设计与仿真
3.1 喘振自动标定模型设计
随着喘振传感器的长时间使用,喘振传感器反馈输出会存在一定的漂移。传感器反馈输出幅值减小漂移时对应的V△PckDC、V△Pck变化关系见图3,当传感器反馈输出幅值减小漂移时(图中虚线),与未发生漂移时(图中实线)相比,压差平均值(V△PckDC)减小了,但是压差平均值的变化不影响压力波动值(VΔPckAC), V△PckAC的幅值大小并没有变化,由于电路的判喘A值阈值是固定的,波动值V△PckAC幅值不变,因此当压差平均值(V△PckDC)减小,此时A值会增大,超出A值阈值,容易达到喘振发生判别条件。
(1)加强施工质量管理。公路工程管理部门应当和施工单位、技术单位、测量单位和质检单位加强合作,在施工现场围绕公路施工质量进行监督,成立质量监管部门进行施工检验,一旦在施工过程中发现质量问题,应当立即指出并要求施工人员进行整改,对于不按要求整改的施工人员进行适当处罚。
在这种情况下,基于喘振传感器反馈值判断发动机发生喘振时,发动机可能实际并未真正发生喘振,导致控制器误判发动机喘振。随着传感器反馈输出减小幅度增加,误判发动机喘振的可能性愈大。为防止喘振传感器漂移导致误判喘振,需要根据传感器以及喘振电路特性,设计自动喘振标定功能,每次数字电子控制器上电后自动完成喘振标定,并将标定值写入数字电子控制器中,避免误判喘振。根据喘振电路原理以及喘振标定原理,可以设计喘振自动标定技术,原理是利用PID通过反馈PckDC_G来修正拐点标定值DA(Pck_DAG),从而快速找到标定值,原理图如图4所示。
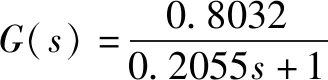
按图1喘振电路原理及元器件特性,Pck_DAG至PckDC_G采集传递函数:
“爱丁堡蚀刻剂”①则是一种更为环保的方法,它通过在硫酸铜溶液中加入柠檬酸来调节PH值,酸化溶液,释放三价铁离子,强化腐蚀力度。柠檬酸是人工合成的食品添加剂,对人体无害,家居常作除水垢等用途。加入柠檬酸后,还可抑制副反应,减少氧化铁等沉淀物的生成,更可让版子面朝上放入扁平的盆中腐蚀。加入柠檬酸使溶液腐蚀速度非常快,接近稀硝酸的效率,因此,爱丁堡蚀刻剂可成为铜版画腐蚀制版的主要方法。腐蚀铜与锌的差异主要是溶液浓度比例不同,如铜版蚀刻的配比约为:氯化铁30%、柠檬酸10%、水60%,锌版则按此比例减半。

Pck_DAG至PckDC_G采集的拐点标定传递函数容差范围:

最小值:

其一阶等效传递函数分别为:
同理,零点自动标定算法具体实现如下:

零点标定完后,控制器内的0.97V直流分量对应某一喘振压差点,为了调整0.97V直流分量对应的喘振压差点,需要对喘振电路进行拐点标定,拐点标定过程是将喘振直流分量中叠加0.3V电压。喘振标定过程见图2。
拐点标定理论及容差范围与等效阶跃响应对比仿真分析如图5所示。
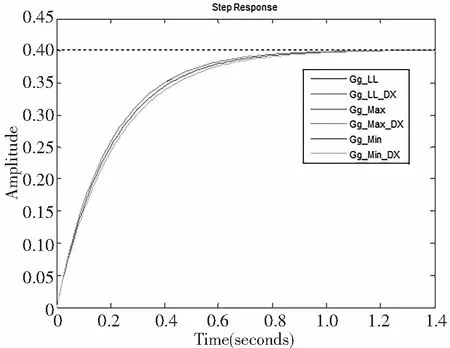
通过电路理论分析可知,喘振拐点标定电路上下容差范围接近,硬件特性变化很小,在容差范围内不存在积分饱和及输出范围超限问题,因此采用传统的
算法,不进行抗积分饱和及输出限制保护即可实现喘振拐点自动标定。
控制软件中拐点自动标定算法具体实现如下:
拐点标定值(Pck_DAG)=400bit-2.5×(拐点标定值偏差+0.18×拐点标定值偏差累加值);
V△Pck信号经过方向放大、叠加偏置电压和低通滤波处理为PckDC_L并通过AD电路采集,PckDC_L信号用于喘振传感器断线检测,当传感器发生断线时,V△Pck≥0.78V,表征PckDC_L采集值小于600bit,可根据该采集值变化来判断传感器断线情况。
“如果能够尽量在一天内把所有的检查完成,患者不用跑来跑去,付出的成本更少;宣教也可以集中,宣教服务人员时间一长也会越来越专业。”黄东胜院长指出。
a)当前拐点标定值偏差-前4个周期的拐点标定值偏差的绝对值均小于3bit;
b)当前拐点标定值偏差小于3bit且持续时间≥75ms;
注:拐点标定值偏差=PckDC_G采集值-326bit。
爬上那道梁,我站在路边那棵孤单的乌桕树下,焦心地眺望着暮色迷茫的远方。时间像蛇一样悄没声儿地溜走,月亮从王家山那边爬上来,明晃晃地挂在半空。路上早断了行人,我不敢往前去,那年在王家山脚下遭狼,到如今我还后怕。想到这里,我又祈愿大梁莫走夜路,晚就晚个天把吧,那年桂生就是这样咬成了狼剩儿的,你可不许遭了狼啊。我在树下走来走去,像个烦躁的困兽,不时扯起脖颈儿,向四周张望。
文中充分利用Qt平台的优势,实现了ROV用户操作软件的设计;同时不再单纯考虑水下运动和实时监控功能,而是从多方面处理ROV的协作关系。虽然在细节方面仍有待完善,但是,通过泳池环境测试,验证了设计方案的可行性。
因此,鱼粉中钙含量的高低也是区分鱼排粉与全鱼鱼粉的一个较为有效的指标。钙含量小于5.0%的可以视为全鱼鱼粉。
在支付宝二维码中的内容实际含了商品各种信息,其形式为一连串定义好的字符串,其中XXXXX为开发者所要填写的商户信息,商户调用第三方库生成二维码图片。
a)当前零点标定值偏差-前4个周期的零点标定值偏差的绝对值均小于3bit;
自动标定过程中,满足a且b,认为任务零点标定值已经找到,停止查找:
零点标定值(Pck_DAL)=500bit0.45×(零点标定值偏差+0.18×零点标定值偏差累加值);
由于大部分农产品含有的基质比较复杂(见表1)。有很多成分如有机酸类、脂类等对有机磷检测的影响很显著,叶宇飞[3]等人研究了果蔬中农残的基质效应,发现部分有机磷农药会产生基质干扰效应,其中辛硫磷的基质效应最强。有机磷农药残留分析主要包括样前处理和仪器分析两个部分。而前处理的好坏直接影响到分析结果的准确性[4]。
b)当前零点标定值偏差小于3bit且持续时间≥75ms;
注:零点标定值偏差=PckDC_G采集值-20bit。
3.2 喘振自动标定模型仿真
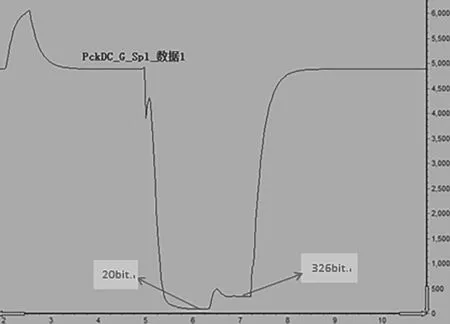
根据3.1节喘振拐点标定的理论模型和最大、最小容差模型,按照图4的原理图和自动标定算法搭建simulink模型,见图6,喘振标定拐点采集值PckDC_G仿真结果见图7。
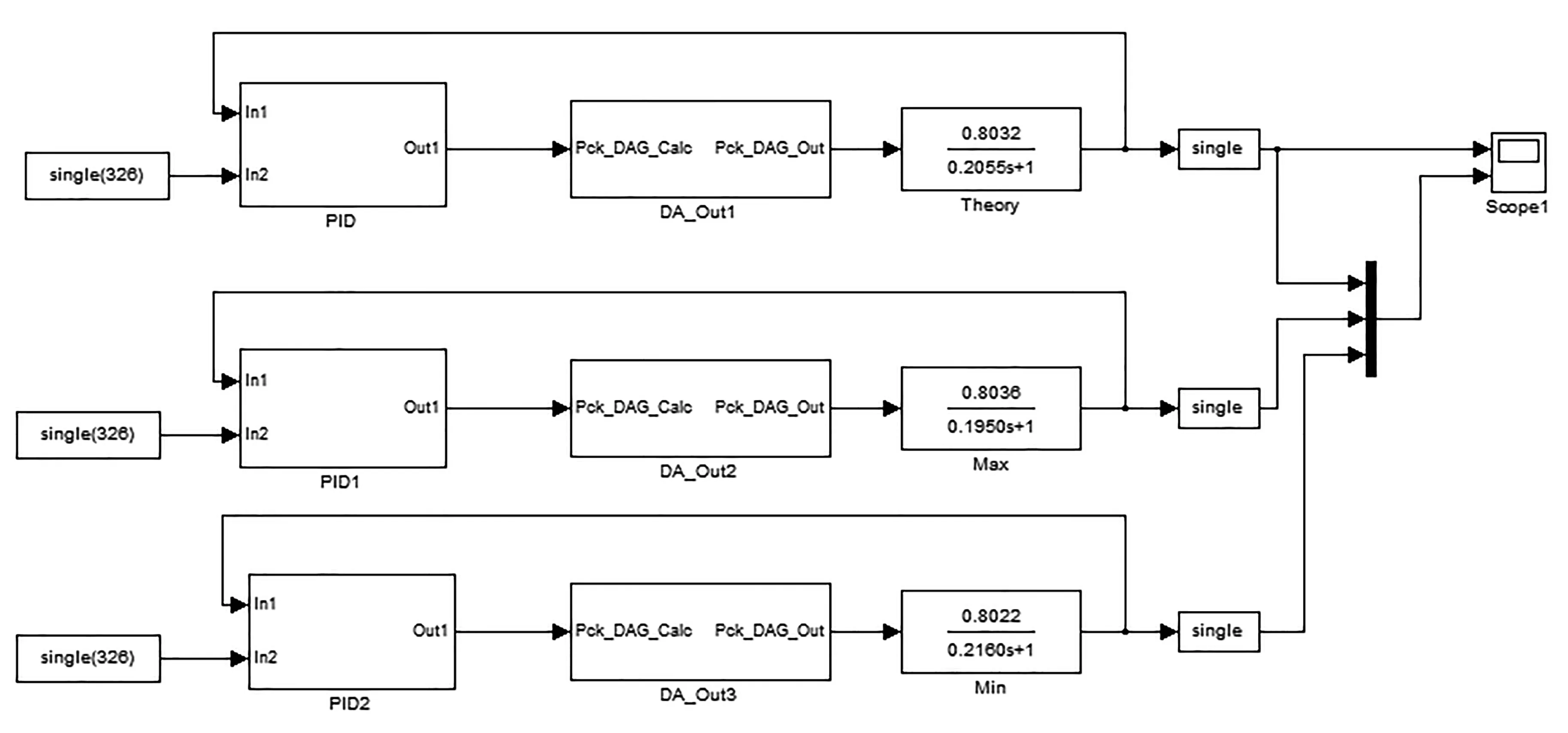
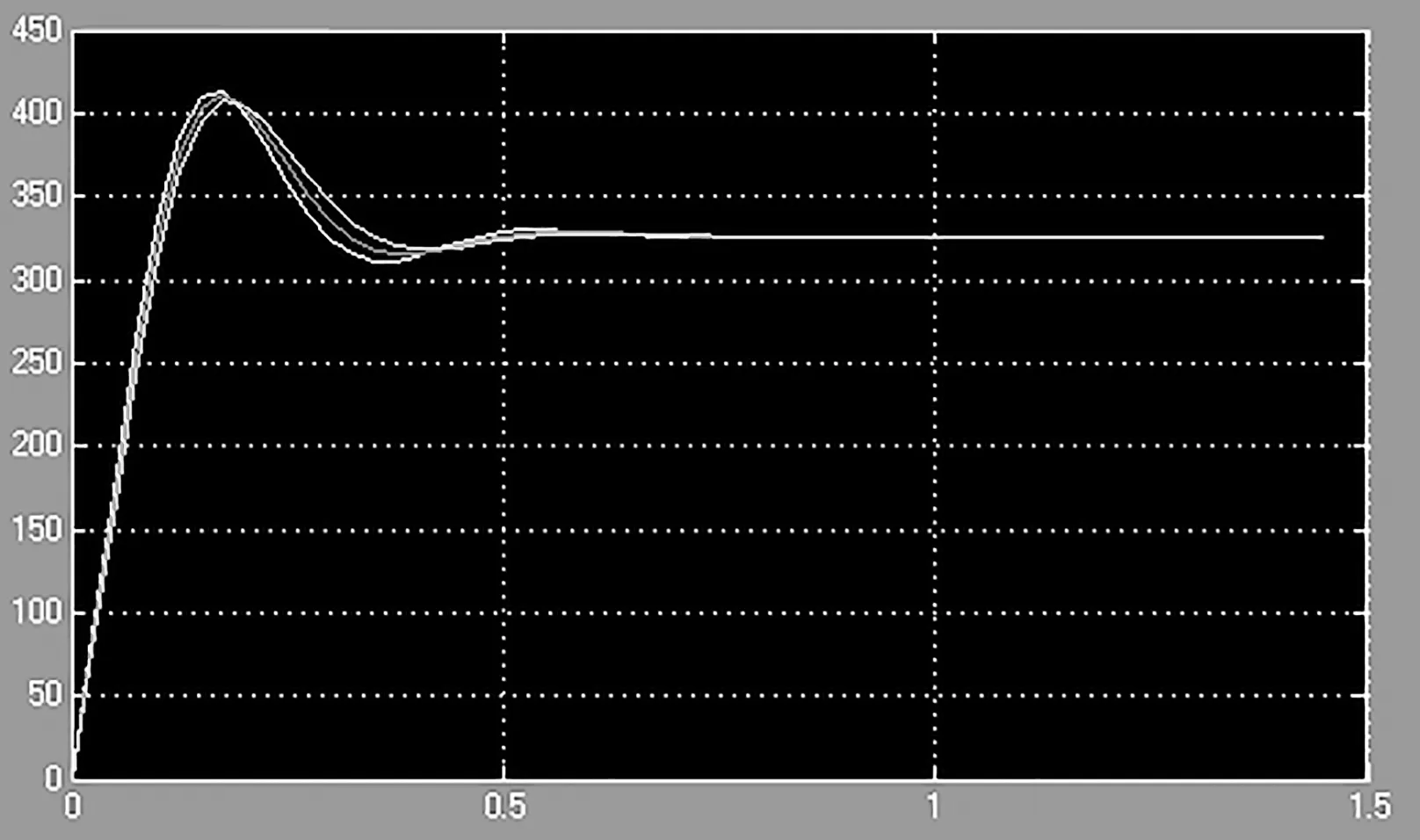
从仿真结果可见,在容差范围内,无论是最大容差模型,还是最小容差模型,喘振标定过程PckDC_G曲线均经过一次波动后达到稳态,稳定时间约0.5s,满足飞行前自检(自检时间要求≤20s)中快速自动标定的要求,因此自动标定PID控制参数参数可以适应喘振标定电路特性在容差范围内的变化。
4 硬件在回路验证
FADEC控制软件落实第3节的喘振标定模型的理论分析与仿真结果,并将控制软件下载到FADEC目标机中进行硬件在回路验证。图8是硬件在回路仿真环境图
。
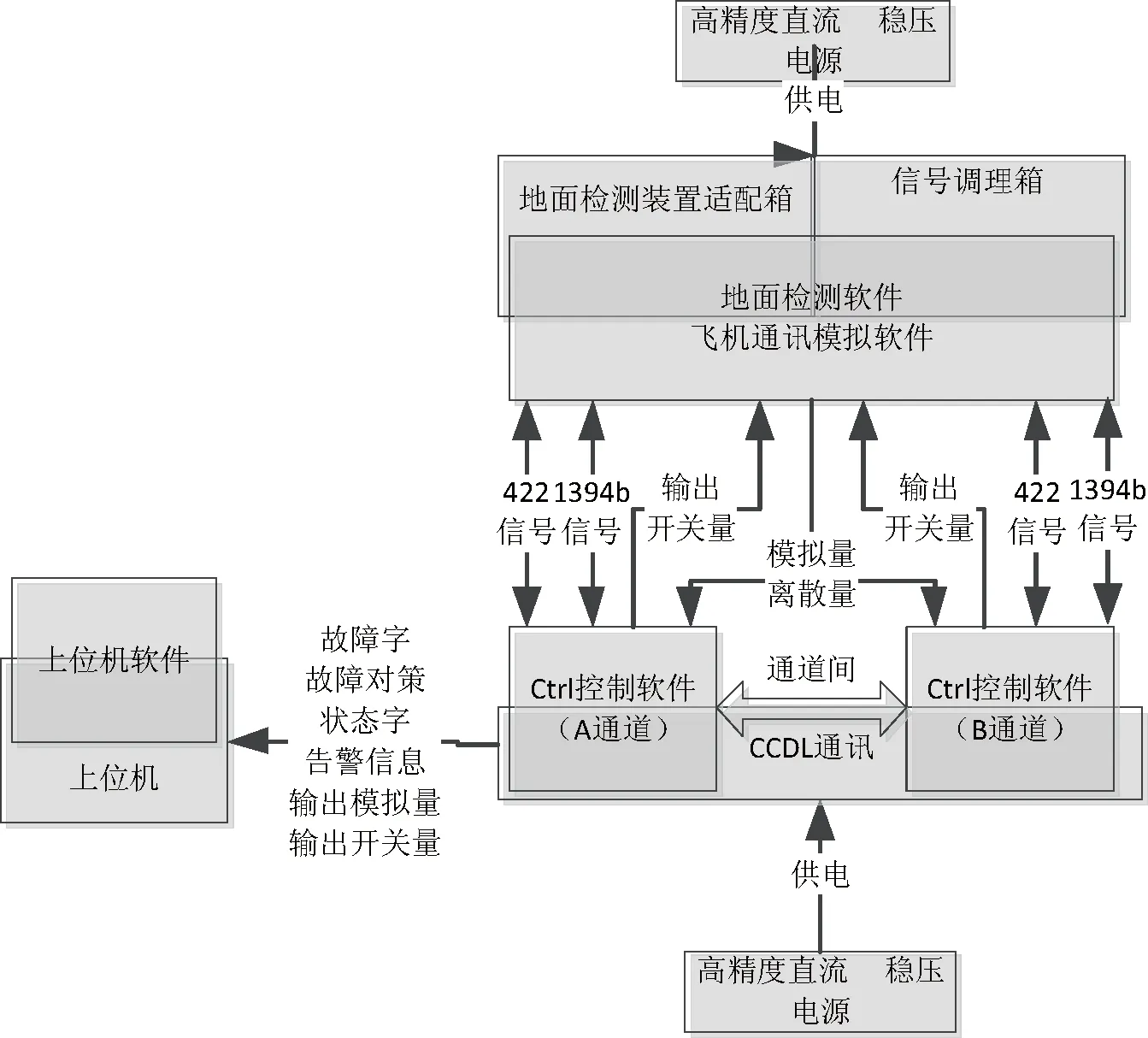
试验过程:控制器上电后,控制软件自动进入飞行前自检过程,在飞行前自检过程中自动完成喘振传感器的零点和拐点标定。
从硬件在回路的仿真结果看,控制软件完成飞行前自检后进入喘振自动标定,自动完成喘振零点和拐点标定的时间约0.5s。验证结果表明,该喘振自动标定技术可以作为正式技术状态落实到FADEC控制软件中,交付外场进行喘振自动标定,减少喘振传感器漂移导致误报喘振的风险。
1.进一步发挥财务职能作用的重要通道。现代企业财务管理职能有了很大拓展,已由传统的核算会计向管理会计迈进。管理会计强调为企业进行最优决策、改善经营管理、提高经济效益服务。为此,管理会计需要记录和分析经济业务,“捕捉”和呈报管理信息,并直接参与决策控制过程。财务报表分析正好对接、满足管理会计需要,为企业提供有价值的分析,为企业决策提供信息服务。以笔者所在集团公司为例,财务管理部门都要定期报送财务报表分析报告,包括月度、季度和年报财务报表分析报告,通过对财务数据加工,挖掘数据背后所能呈现的生产经营状况,服务集团决策层、管理层。
5 结束语
发动机喘振故障作为一种多发故障,是航空发动机的一种不稳定工作状态,并在很短的时间内造成机件的严重损坏,严重危及飞行安全。本文根据某型航空发动机外场出现的喘振传感器漂移导致无法及时准确的判断发动机喘振的问题,开展了用于喘振判断的喘振电路分析和喘振标定原理分析。并根据喘振电路建立了喘振标定数学模型,并根据数学模型设计了喘振自动标定控制参数。桌面仿真和硬件在回路仿真结果表明,喘振自动标定数学模型可以应用在外场技术状态中,有效减少喘振传感器漂移导致误报喘振的风险。
[1]李应红,李军,姜涛. 某型发动机喘振综合治理及扩稳试验[J]. 推进技术,2002,23(3):213-215.
[2]詹洪飞,黄帅. 某型涡轴发动机喘振攻关与验证[J]. 海军航空工程学院学报,2017,32(3):295-301.
[3]WalshP P, Fletcher P. Gas turbine performance [M]. Oxford, UK: Blackwell Science Ltd. , 2004.
[4]屈霁云,马明明,王小峰,马燕荣. 某型发动机喘振特征分析及消喘系统验证试验[J]. 航空动力学报,2010,25(6):1291-1296.
[5]Schobeiri M T. Active Areodynamic Control of Mult i-Stage Axial Compressor Instability and Surge by Dynamically Adjusting the Stator Blades[R].ASME Paper GT-0479,2001.
[6]Gysling D L. Dynamic Control of Rotating Stall in Axial Flow Compressors Using Aeromechanical Feedback[ J]. ASME J.Turbomach. 1995,117:307~319.
[7]吴虎,蒋建军.加力涡扇发动机喘振与消喘模拟[J]. 航空动力学报,2006,2(21): 275-279.
[8]张绍基,刘世官. 航空发动机消喘控制系统设计与试验[J]. 航空动力学报,2012,27(1): 204-210.
[9]任士彬,孟庆明. 中国发展航空发动机FADEC技术的途径[J]. 航空发动机,2010,36(3):53-56.
[10]Skira C.A., etc. Design Evaluation and Test of an Electronic, Multivariable Control for the F100Turbofan Engine, N 80-0205.
[11]Hackney R.D. Propulsion Controls a look into the Future, N 81-12095.
[12]Seemann R.J., etc. Integrated of Fire Control, Flight Control & Propulsion Control Systems, A/DA 135166.
[13]石斌. 航空发动机高可靠性FADEC软件系统技术研究[M].西北工业大学硕士学位论文,2004:15-16.
[14]沈文炜,施惠昌. 基于循环神经网络的传感器漂移补偿方法[J]. 计算机工程与科学,2005,27(12):95-100.
[15]刘斌,徐正国. 一种新的非线性系统传感器漂移性能退化实时监测方法[J]. 系统科学与数学,2012(6):791-798.
[16]刘 涛,黄智勇. 用于气敏传感器漂移补偿的数据选择方法[J]. 重庆大学学报,2013(4):75-79.
[17]吴远盛,陈超,朱帅琦. 基于MBD的某型发动机控制软件开发[J]. 航空兵器,2018(4):73-77.
