用于水凝器焊接的变位机结构设计
2022-08-02田刚
1 引言
制冷器中的水凝器制造已经由传统手工焊接方式焊接逐步转向焊接机器人工作站或者自动焊接流水线焊接
。采用自动焊接可以较大程度的保证工件的焊接质量,提高生产效率,同时减少焊接对生产者的身体伤害。水冷式冷水机用的冷凝器常用的是壳管式冷凝器,其主要结构由分子筛、干燥包、和堵头组成。外壳采用5mm以上厚度之不锈钢管制成,经防锈处理,耐压可以达到30kg/cm
以上。因不同水凝器的尺寸、结构有差异,设计一款适用于自动焊接机器人工作站的变位机具有很重要的实际应用价值
。
模型小鼠淋巴细胞转化反应明显下降,与对照组比较,PI值明显下降,差异显著(P<0.01)。ig给予金钗石斛破壁粉及阳性对照左旋咪唑后,均能促进小鼠脾淋巴细胞转化反应,与模型组比较,PI值明显上升,差异显著(P<0.05、0.01)。结果见图2。
2 变位机结构设计方案
2.1 工作站总体布局设计
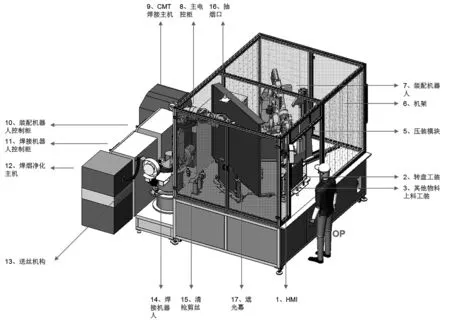
目前市面上适合连续作业的精密焊接机器人极限臂展不超过2.4m,冷凝器的尺寸为500mm x 400mm x 20mm,尺寸较小,常规的焊接机器人能够满足其焊接范围需求,但焊接直接需要将冷凝器的堵头压装、涂胶再进行焊接,为了实现全流程的自动化操作,在该工作站中配置一台装配机器人。因此,本变位机搭配双机器人的焊接站,其中一台机器人为上料机器人,另一台机器人为焊接机器人,该焊接工作站的主要组成有:上料工装、机器人上料夹具、人机交互、变位机、压装机构、机架、装配机器人、主控柜、焊接主机、装配机器人控制柜、焊接机器人控制柜、净化除尘装置、送丝机构、焊接机器人、清枪剪丝机构、遮光慕,其基本布局如图1所示。
焊接机器人与装配机器人的选型要考虑通用性,性价比较高,且具备较好的焊接工艺性
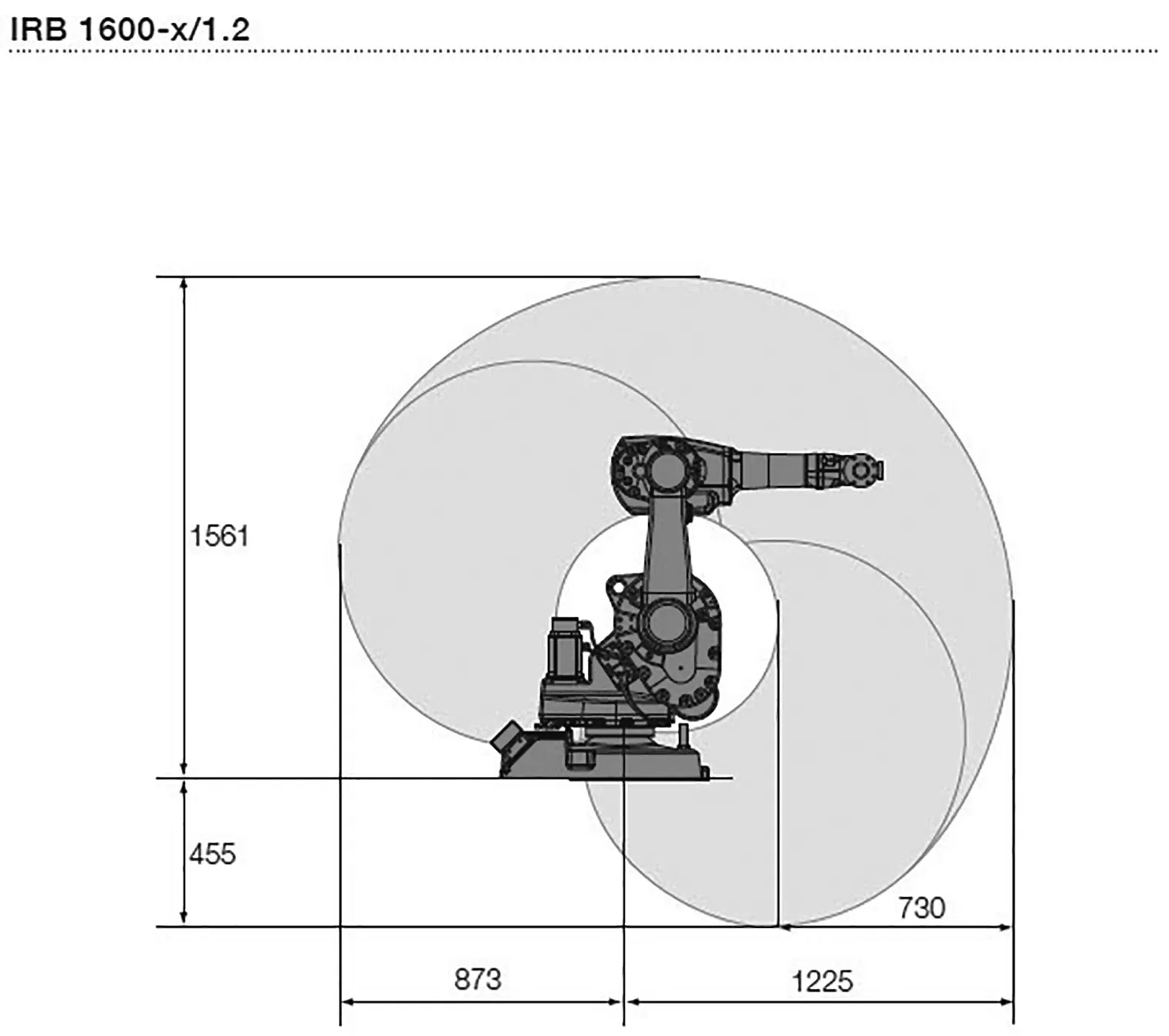
。本工作站选用ABB的IRB1600作为焊接机器人,该机器人为6轴机器人,工作半径为1.2m,有效载荷10kg,配置CMT焊接主机、焊丝机构和清枪机构,其焊接机器人的工作半径图如图2所示。
2.2 变位机设计
变位机的功能主要是满足水凝器的装配和焊接中不同工位的转换
。变位机分为三个工位,分别是人工上下料工位、自动装配工位、焊接工位。不同的工位之间步进旋转,依靠一组凸轮机构实现定位,定位精度高。其结构如图3所示。在变位机底盘安装步进电机和减速机,三个工位之间成120度布局,每个工位带有定位夹具和放料板。
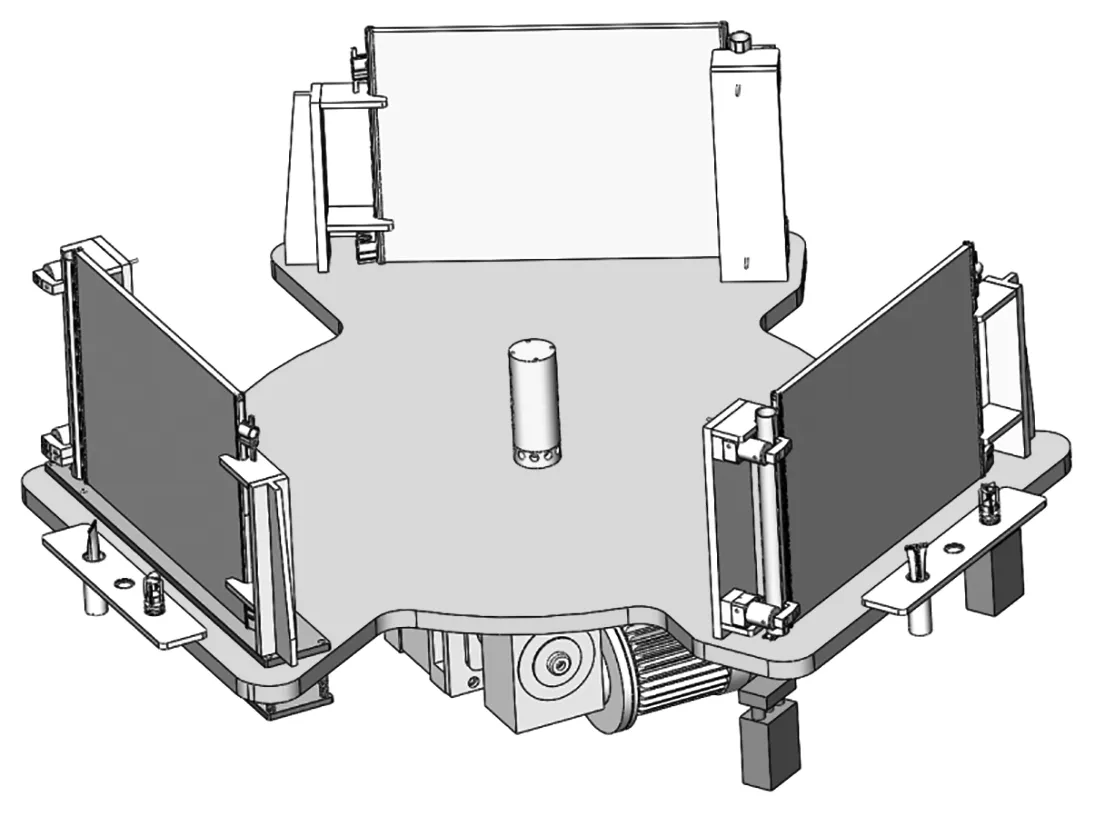
在每个工位都配有本体夹持机构,该机构有一组气缸安装手指定位销组成,当PLC发出定位信号后,手指气缸推出到变位机底板的定位槽内,实现定位锁紧
。工件的压装和焊接分为两个不同工位,两个工位均带有直线轴承能够承受部分径向力,能够保证压装过程中工件能平稳直线移动。同时拉紧弹簧在变位机启动时能保证压装模组快速复位。
对工件冷凝器进行装配之前,首先需要将配件摆放到托盘内的固定位置,装配机器人才能将配件依次抓取安装到冷凝器的安装位置,因此需要设计配件上料模组。该模组随着转盘转动,但与工位之间位置固定,模组内有三个放置孔,分别放置干燥包、堵盖、分子筛三种配件。机器人抓料机构实为装配机器人末端法兰盘安装的夹具,该抓料机构分等边三角形盘形机构,三角盘的三个角分别安装两个夹爪机构和一个真空吸盘,分别用螺钉固定。两个夹爪机构有小型气缸和夹爪组成,分别用以抓取干燥包和分子筛,而真空吸盘用以吸住堵盖顶端。该机构的三角盘中心处设计为机器人末端法兰盘相同的结构,可以采用气动快换头设计,来与机器人末端法兰盘联结。
在PPP项目中,当建设项目的不同主体在确定股权比例之后,还要对负债水平进行合理的确定。通常表现为股权比例高,债务比例就会低,所带来的经济效益就会多,因此,在对大规模的建设项目进行投资时,都会选择较高的债本比例。
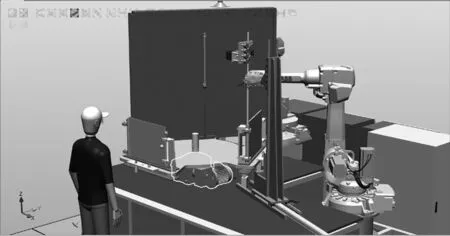
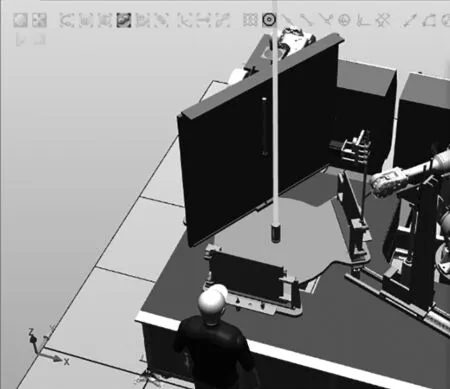
为验证优化变位机设计和验证设计的合理性,将变位机配合焊接机器人工作站导入RobotStudio中进行整体仿真
。首先,将变位机创建为机械装置,方便在控制器中添加逻辑指令,才能通过编辑程序加以控制。
2.3 气动设计
水凝器焊接工作站的变位机的主要作用是配合双机器人的装配与焊接,其工作流程如图6所示。

(1)
(2)将整个上部组件设为L2;
肿瘤边缘相对清晰的有8例,边界全部或部分不清的有9例患者肿瘤周围脂肪间隙消失。肿瘤累及肠系静脉、动脉、胰腺的有4例。胃肠道间质瘤附近呈线性增厚的有1例,CT增强扫描表现为明显强化。
本文通过动力学仿真软件Workbench对某型号移动式筛分站采用的新型半内藏式液压马达驱动滚筒建立虚拟样机模型,对其工作状态进行仿真静力学分析和疲劳分析,用理论计算得到应力的值和仿真分析计算的值比较,证明了虚拟样机的准确性。同时,验证了机构的可行性和合理性,为采用半内藏式液压马达驱动滚筒的设计提供了参考依据。

(2)
其中
为活塞杆直径(mm),一般取
=0
3
1997年,一场广为人知的人机大战打响。加里·卡斯帕罗夫试图卫冕国际象棋冠军。虽然他曾打败过IBM的象棋程序深蓝,但在复赛中被打败了,这立刻成为头条。人们疑虑的是:机器脑的逻辑思维能够比肩人类?甚至还超过人类?当时有专家打赌:在国际象棋比赛中战胜人类的机器,在围棋比赛中未必能获胜。因为围棋对弈需要战略思维,需要全局观念。然而,历史又开了一个大玩笑。
(1)从原组部件中选中变位机底部电机,创建为L1,将底部电机组件设为BaseLink;
气缸的实际拉力为:
3 仿真设计
3.1 工序要求
变位机压装工位下面带有两个气缸,当使用空气压力为0.5MPa时,气缸理论输出力
=10.1N。已知变位机的质量为60kg,气缸与表面的摩擦力
为0.5,气缸行程
=40mm,气缸的响应时间
=0.2s。气缸的理论推力为:
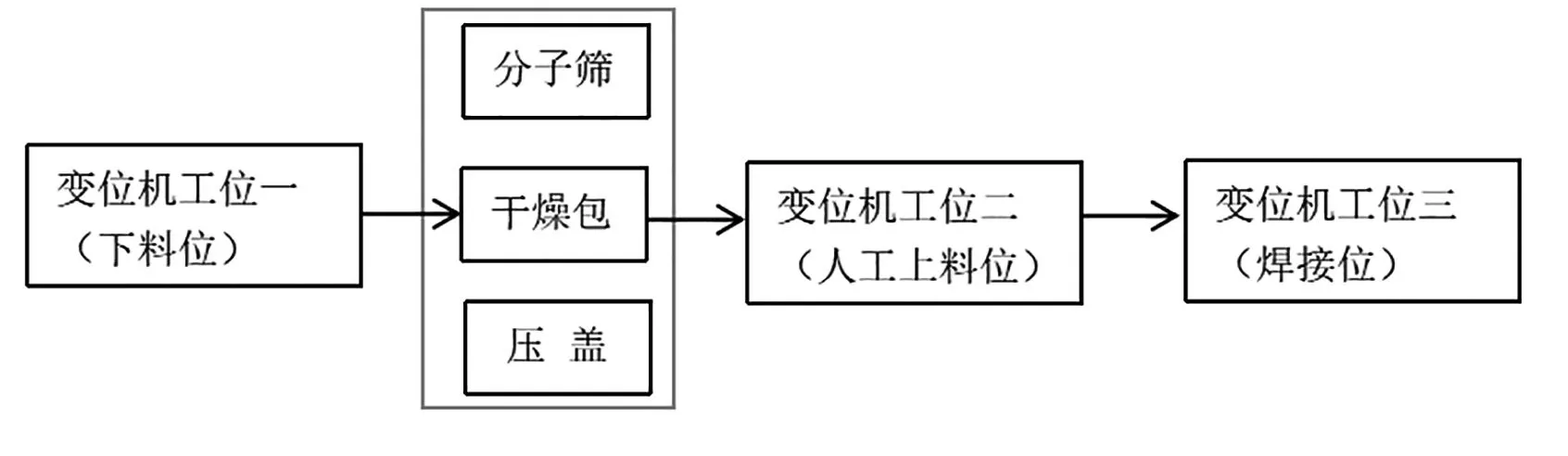
人工将其他三种物料放入相应的工装后;人工双手启动,变位机变位一;变位后,装配机器人和压装机构将各个部件装配到一起;变位二,后焊接机器人对压盖进行焊接;再次变位后人工对完成的产品下料。
3.2 仿真设置
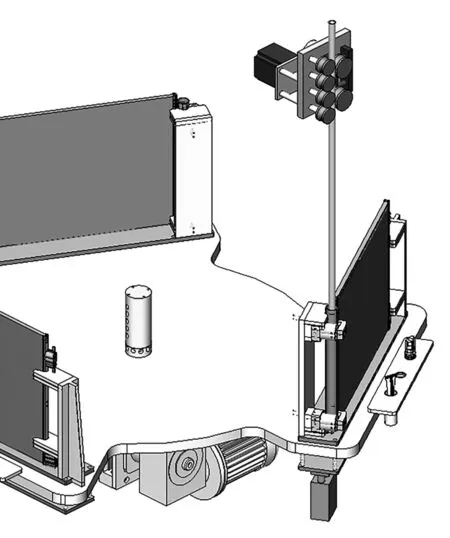
通过压装模组将干燥包压入冷凝管中(如图4),压装模组的主体机构为一个电机驱动夹送轮来夹持一根压杆进入冷凝管孔内,夹送轮采用两排共六个辊轮设置,保障夹送轮正反转不卡顿。此时,转盘机构与压装模组的位置对应精度要求高,压杆的移动速度要求快,故电机选用伺服电机,保证速度快且压装精度稳定。压装机构安装在一个水平方向移动的模组上,模组支座用螺栓固定在工作站的工作台上面。模组采用伺服驱动,全闭环控制,能保证水平方向移动精度控制在0.02mm以内,压装机构上下移动同样采用伺服电机驱动。模组内采用两组双导轨设计,保证压装机构移动的稳定性。
对照组方法---于常规治疗的基础上给予口服氯吡格雷(国药准字J20130007、赛诺菲(杭州)制药有限公司、2017080711)治疗,剂量为75mg,一天一次,疗程为1年。
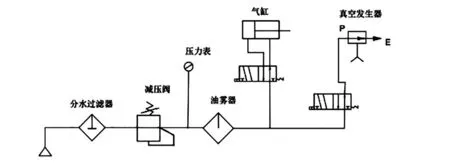
因此,阻挡定位装置选用的锁紧气缸型号为MXS16-40AS,缸径为16mm,行程为40mm。其锁紧气缸的气动系统由真空发生器、减压阀、油雾器、压力表、分水过滤器,储气罐,空压机组成,其原理如图5所示。
其中
为缸径(mm),
为气缸的工作压力(MPa)
(3)设置旋转接点,旋转轴设为圆盘中心轴,最后编译机械装置,完成变位机机械设置。
其操作过程如图7至9所示。
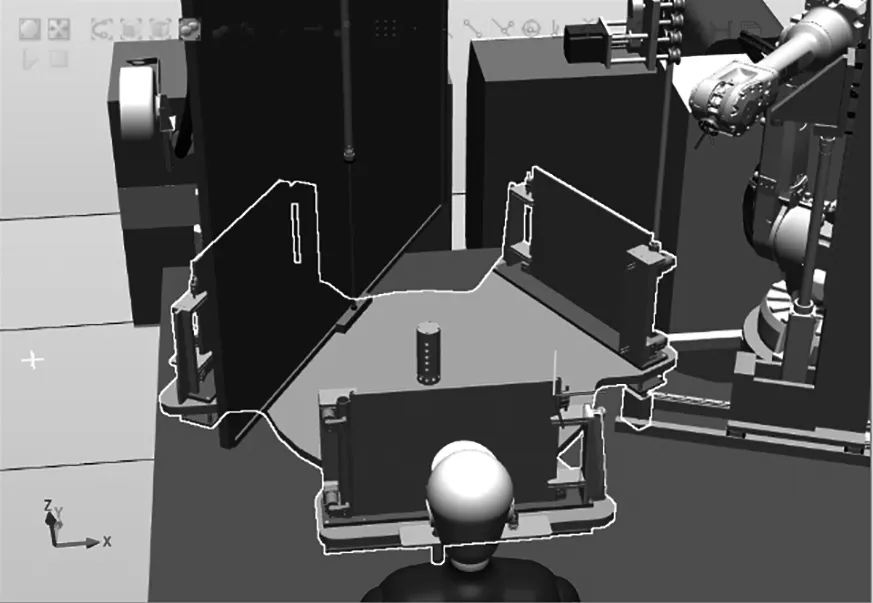
对变位机创建机械装置后,再对工作站整体设置Smart组件,对机器人示教,Rapid程序编辑,仿真设置,完成余下仿真工作。通过仿真验证,结果显示变位机在三个不同工位可以顺利步进,其过程与工作站本体、双机器人之间无干涉,说明该变位机结构设计合理。
3.3 Smart组件设置
在变位机的机械装置设置后,需要对焊接工作站的两个机器人进行Smart组件设置。仿真需要创建的Smart组件有:装配机器人Smart设置(IRB 2600)、焊接机器人Smart设置(IRB 1600ID)。首先,装配机器人吸盘夹具能够将产品主体吸起、放下(主要使用模块安装Attacher和拆除模块Detacher);将线传感器(LineSensor)安装在吸盘处,用来检测产品信息,并为后续安装,拆除提供对象信息;使用PosMover模块对机械装置的位置进行控制;用Source模块在产品本体左侧管口生成分子筛和干燥包,模拟工具在此处放置分子筛和干燥包的动画效果。其次,在焊接机器人的Smart设置中,使用PoseMover模块使变位机工件移动到相应姿态,从而配合转盘机的焊接工位切换。所以为了方便控制,添加了2个输入信号create1和create2,分别控制生成干燥包和生成分子筛。下面以生成分子筛为例,说明信号连接设计流程。连接如下,输入create2信号与Source模块生成分子筛的Execute相连接,达到给create2信号,系统自动在Source指定地点生成分子筛模块的效果。后将Source模块生成分子筛的Copy端,即Source模块复制生成的物体与Attacher的child端相连,将LineSensor的SensedPart端,即之前用线传感器检测的对象(产品主体)与Attacher模块的Parent端相连,作为“父”对象。从而达到将Source生成的对象安装到LineSensor检测到的对象上的效果。同时给Attacher模块的Execute端接上creat2信号。
同理可将create1信号控制生成的物体按此方法安装到产品本体上。在生成干燥包的Soruce模块中的物理特性选项选为Dynamic,生成的干燥包会自动掉到管道底部不会停留在设定的生成位置。另外需要对焊接机器人和装配机器人分别示教目标点,根据目标点插入运动指令,合理规划机器人轨迹路径,插入逻辑指令,完成机器人运动路径的设计。对路径进行自动配置,沿着路径运动后,同步到Rapid程序,至此,焊接机器人工作站的离线仿真设计全部完成,点击仿真选项卡,进入main程序,对工作站进行仿真。
4 结论
本文通过三维设计软件对水凝器焊接机器人工作站变位机的结构设计,采用RobotStudio机器人仿真软件对变位机进行仿真,验证了设计的合理性,方便后期对变位机的进一步优化。本设计也作为高校实训教学用的焊接机器人工作站的优化设计的一种尝试,同时,由于作者技术水平有限,设计内容难免有不完善之处,还望业内同仁不吝赐教。
[1]潘文联,成楠,郑黎明,富巍.焊接机器人自动化焊接的实现与探索[J].焊接技术,2022,51(01):72-75.
[2]张成桥,鲁效平,刘玲,邓友良.自动化焊接技术的研究与思考[J].焊接技术,2021,50(12):1-6+129.
[3]田学华,张志毅,吴向阳,湛红晖.转向架焊接机器人智能集控系统及关键技术[J].智能制造,2021(06):34-39.
[4]潘登,任建强,吴广宇.焊接机器人在机电安装施工中的应用[J].现代工业经济和信息化,2021,11(11):161-162.
[5]杨杰,李志强.滚筒焊接机器人系统的研发建设[J].焊接技术,2021,50(06):70-73+108.
[6]夏中坚.工业机器人的虚拟仿真技术在信息化课程教学中的有效应用[J].南方农机,2021,52(10):148-149.
[7]陈琢,刘艳.以机器人创新实践活动促进人工智能教育开展[J].教育教学论坛,2020(53):262-264.
[8]张骥丰,郑卫刚,张琦.挖掘机斗杆焊接机器人工作站的设计及应用[J]. 热加工工艺,2012, 31(7):200-201.
[9]李西洋,成斌,李成松,等.播种机机架焊接机器人柔性工作站设计[J].组合机床与自动化加工技术, 2016(1):49-58.
[10]侯霞,许燕玲,黄色吉,等.视觉传感技术在机器人焊接中的应用[J].上海交通大学学报,2016,50(A1):55-58.
