一种考虑多方向线性结构的灰度图像椒盐脉冲噪声滤波方法
2022-08-01石宝
石宝
内蒙古工业大学信息工程学院 内蒙古呼和浩特 010051
1 概述
在图像信号的传送或获取过程中,因为受到外部因素的干扰而产生噪声,使得图像的质量受到影响。噪声根据其产生的因素可以分为随机噪声和系统噪声。随机噪声有高斯噪声、白色噪声、脉冲噪声等。本论文中的研究对象为脉冲噪声的一种噪声,即椒盐噪声。
Sun首次将噪声去除过程分为噪声检测和滤波两个步骤[1]。首先,通过噪声检测方法将噪声像素检出之后做成噪声地图。其次,利用滤波方法对噪声像素进行滤波处理。检测方法的好坏影响噪声能否被正确检出。经典的脉冲噪声检测方法有边界判别噪声检测器(BDND)[2]。BDND能够将大部分的噪声像素检出并且几乎没有漏检。本论文主要围绕滤波方法进行研究。
典型的不考虑线性结构特征的滤波方法有中值滤波(MF)方法[3],是由Tukey提出的方法。在MF中,将滤波窗口内的像素按像素值的由小到大进行排序,之后将排在正中间的像素值作为输出值输出。MF是典型的不考虑结构特征的滤波方法。除了MF以外,不考虑线性结构特征方法还有很多[4-7]。考虑线性结构特征的方法有最小最大互斥内插滤波器(MMEIF)[8]、线性结构滤波方法(LSF)[9]、局部线性结构滤波方法(LLSF)[10]等。在MMEIF中,考虑3×3的滤波窗口中通过中心像素的横向、纵向、45°方向以及-45°四个方向。在这四个方向上,求非噪声像素的绝对差,并将绝对差最小的方向视为线性结构的方向,最后将该方向上非噪声像素的平均值当作输出值。在LSF中,考虑5×5滤波窗口中的横向、纵向、45°以及-45°四个方向。对某一个方向而言,考虑中央线及与中央线相邻的共三条线。当两条以上线上的非噪声像素的个数都大于阈值时求这些线上像素的方差,并将平均方差当作该方向的方差。其次,将平均方差最小的方向视为线性结构的方向。最后,将该方向的中央线上非噪声像素的中值当作输出值。LLSF在LSF的基础上做了改进,LLSF中,考虑3×3窗口中横向和纵向两个方向的线性结构。与LLSF不同的是:首先,LSF对线性结构进行判断时只考虑与中央线相邻的两条线;其次,只考虑横向和纵向。
本论文中提出一种考虑多方向线性结构的椒盐脉冲噪声滤波方法。相比较以往的方法,首先,所提方法中增加了考虑的线性结构的方向,考虑的线性结构方向共有12个方向。其次,针对像素值的分布不同所采用的滤波方法不同:针对平坦区域采用MF进行滤波,针对具有线性结构的区域采用考虑线性结构的滤波方法。
2 所提方法
所提方法的流程图如图1所示。图1中的x(i,j)表示噪声图像中像素值,f(i,j)表示噪声检测后的结果。当f(i,j)=0时表示该像素为噪声像素,当f(i,j)=1时表示该像素为非噪声像素。滤波时,将滤波后的像素当作非噪声像素使用。
所提方法中考虑的线性结构的方向d如是从0°(d=1)至165°(d=12)的以15°为间隔的12个方向。方向d=1和d=5的样例如图2所示。
2.1 判断平坦区域
以像素(i,j)为中心的局部区域Qρ(i,j)中,区域的方差vi,j被定义为:
(1)
其中,
(2)
(g,h)表示输入图像中像素的原始坐标。Qρ(i,j)表示离像素(i,j)的棋盘距离为ρ以下并且f(k,l)=1的像素的集合,|Qρ(i,j)|表示该集合的要素数。
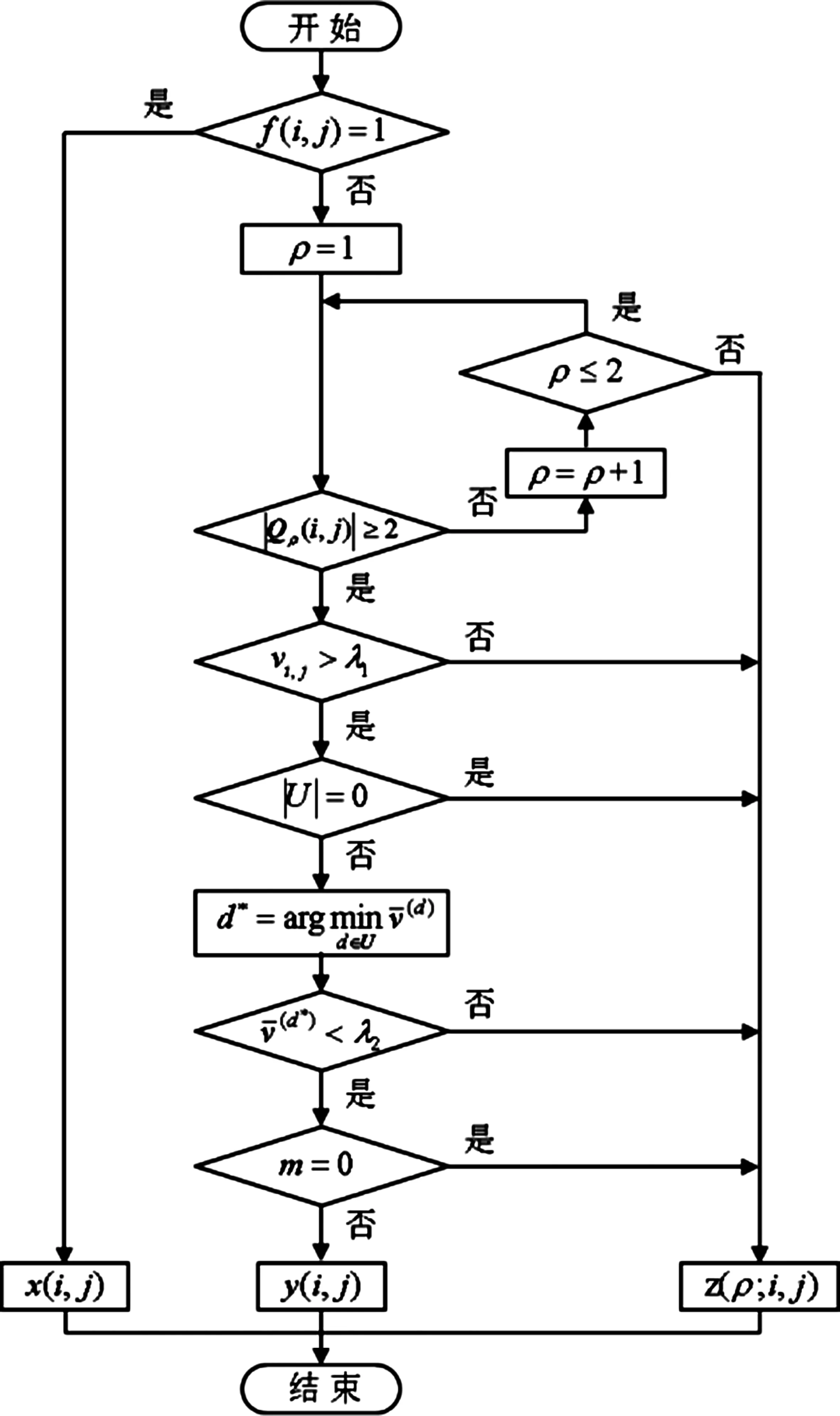
图1 所提方法的流程图
当vi,j小于阈值λ1时,将该区域视为平坦区域;否则,视为细节区域。其中λ1为参数。针对平坦区域,采用MF进行滤波处理。针对细节区域,判断该区域是否有线性结构。
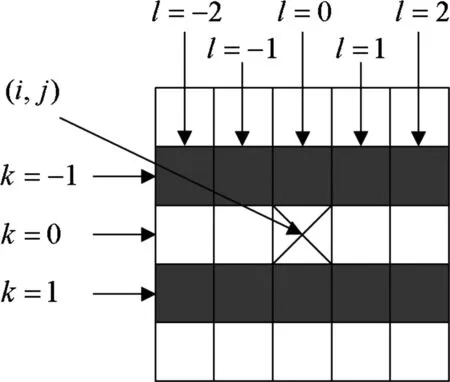
(a)d=1
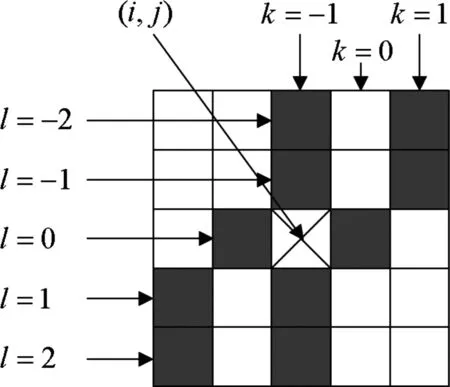
(b)d=5图2 方向d的像素分布实例
2.2 所提方法的MF
所提方法的MF的输出z(ρ;i,j)被定义为:
z(ρ;i,j)=Median{Qρ(i,j)}。
(3)
Median表示中值滤波。当|Qρ(i,j)|为偶数时,将中间两个像素值的平均值当作Median的输出。
2.3 线性结构的可判断条件
所提方法中,方向d的可使用的像素组D(d)被定义为:
(4)
(5)
U={d|D(d)=12}.
(6)
(k,l)表示各方向的线性结构中像素的相对坐标。C表示与中央线相邻的各线上的像素的集合。
2.4 线性结构的判断
(7)
其中:
(8)
(9)
(10)

(11)
2.5 线性结构的输出
线性结构的输出y(i,j)被定义为:
(12)
其中:
(13)
是权重,其被定义为:
(14)

3 实验
实验中使用的灰度图像为Barbara、Boat、Lena、Pepper,图像尺寸为512像素×512像素。实验中,噪声检测器使用了BDND[6]。所提方法中的参数λ1和λ2分别设置为50和2000。
比较方法采用了MF[1]、AMF[2]、MMEIF[8]、EAMF[4]、LSF[9]、UWMF[5]、AWMF[6]、AFMF[7]等方法。
各方法的结果图像的峰值信噪比(peak signal to noise ratio,PSNR)如表1所示。能够看出,除了p=0.05和p=0.10以外,其他噪声密度下所提方法的PSNR的平均值都是最高。p=0.05和p=0.10两种情况下,所提方法的PSNR中,LLSF的平均值最高,所提方法的平均值是第二高。
表1 PSNRTable 1 PSNR
结语
本论文中提出了一种考虑多方向线性结构的灰度图像椒盐脉冲噪声滤波方法。在滤波过程中,针对平坦区域和线性结构区域分别采用不同的滤波方法。通过实验验证了所提方法在修复线性结构方面大部分情况下优于其他方法。
