基于CarSim的电动助力转向系统仿真研究
2022-08-01杨小刚王慧华
杨小刚 王慧华
(天津中德应用技术大学,天津 300350)
0 引言
为了提高汽车转向的稳定性和安全性,提升驾驶舒适度,电动助力转向(EPS)系统已成为现代汽车的标配电子设备。汽车的转向轻便性和灵敏性之间存在着矛盾。电动助力系统依靠助力电机提供转向辅助,采取不同的转向控制策略,能有效解决转向的轻便性和灵敏性之间的矛盾[1]。
1 EPS系统的结构和工作原理
EPS系统由电控部件和机械传动部件组成[2],包括助力控制ECU、转矩传感器、前轮速度传感器、直流电动机、减速器以及齿轮齿条转向器(见图1)。

图1 EPS系统结构图
当汽车转向时,转矩传感器和前轮速度传感器分别把转向柱扭矩转角信号、车速信号发送给助力控制ECU,根据预先存储的助力数据,从而使助力电机发出适度辅助扭矩,通过减速机构减速增扭后传送给机械转向单元,助力驾驶员扭矩,抵消轮胎受到的转向阻力,从而实现助力转向功能。
2 EPS系统模型分析
电动助力转向系统是一个复杂系统。为了便于研究,本研究将整个EPS 系统简化为转向盘及转向柱、直流电动机、齿轮齿条转向器、转向轴,列出各部分的动力学微分方程,见式(1)至式(4)。
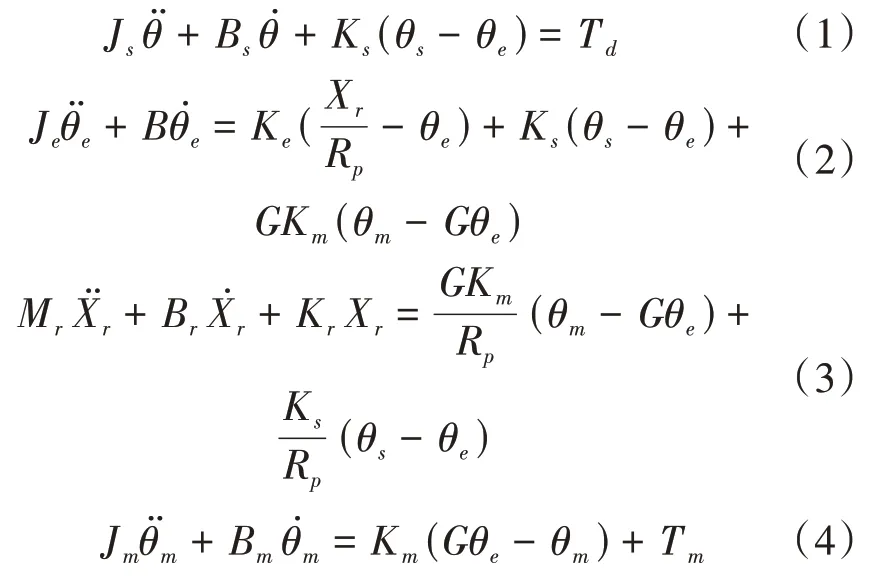
式中:Js、Bs、Ks、θs分别为转向盘及转向柱的转动惯量、阻尼系数、扭转刚度和转角;Td为转向盘的输入力矩;Je、Be、Ke、θe分别为下转向柱的转动惯量、阻尼系数、扭转刚度和转角;Mr、Br、Kr、Xr分别为齿条质量、阻尼系数、刚度和移动量;Rp为小齿轮分度圆半径;Jm、Bm、Km、θm分别为电机转动惯量、阻尼系数、轴扭转刚度和转角;G为减速机构减速比;Tm为助力电机助力矩[3]。
3 EPS系统助力特性曲线
随着车速的增大,转向阻力矩则减小,助力电机的输出力矩也随之降低。本研究选取扭矩传感器的扭矩信号和车速信号为输入信号,利用Matlab软件中的Fuzzy工具,经过模糊化、模糊推理和反模糊化过程(见图2),选取目标电流为输出变量来优化设计助力特性曲线。

图2 模糊PID控制框图
模糊自适应PID控制是利用模糊规则对PID控制参数进行实时调整,从而实现良好的动态性和真实的操纵性相结合。本研究根据驾驶环境和转向工况的变化,对PID 控制的原始参数KP0、Ki0和Kd0进行实时调整,设计一款基于模糊自适应的PID 控制器,实现对动态控制参数K′P、K′i和Kd0输出的动态调整。PID 控制器的3 个实控参数经过整定后分别用KP、Ki和Kd来表示[4]。3 个参数之间的关系见式(5)至式(7)。

目标电流论域设定为(0,20),车速论域设定为(0,80),扭矩论域设定为(1,8),模糊语言可设定为{Z(零),QS(相当小),S(小),M(中等),B(大),QB(相当大),GB(最大)}(见表1)。

表1 助力特性曲线模糊规则
4 CarSim与Simulink联合仿真建模
在对模糊自适应PID 控制研究的基础上,确定模糊自适应PID 的控制器模型。在助力特性曲线上选定合适的目标电流I0和直流电机实际工作电流I作为模型输入,对PID 的3 个实控参数KP0、Ki0和Kd0进行初始化,输出的是直流电机的端电压Uzl[4]。整合EPS 系统各模块后建立Simulink 模型,比较PID控制和模糊自适应PID控制两种方法的目标电流与实际电流之间的动态差别。
CarSim 采用输入特性参数来代替实体建模和结构分析,并结合Simulink 模型建立整车联合仿真模型。Simulink 接收CarSim 模块传来的前轮转角、侧向力、车速等信息,计算回正力矩和转向盘转角,反向传递给CarSim 模块(见图3)。结合回正和转向两种工况的要求,不断改变转向盘上的转矩,验证设计出的EPS系统控制策略是否合理。

图3 EPS系统Simulink与CarSim仿真模型
5 EPS系统控制策略仿真分析
5.1 转向轻便性仿真分析
按照《汽车操纵稳定性试验方法》(GB/T 6323—2014)的要求,设定双纽线行驶路线,通过记录转向盘转矩和转角的数据来验证助力控制策略及控制算法的有效性。将车速设为10 km/h,输入不同的正弦角来对模糊自适应PID 控制、PID 控制和没有转向助力控制下转向盘转矩与转角的关系进行分析(见图4),验证其转向轻便性能的优劣。

图4 转向轻便性对比
由图4 可知,转向盘的扭矩值在转向盘转角为450°时最大。采用助力控制后,转向盘扭矩值明显减小:PID 控制降低46.2%,模糊自适应PID 控制降低54.9%。
5.2 回正性能仿真分析
按照《汽车操纵稳定性试验方法》(GB/T 6323—2014)中的要求,在车速为20 km/h、50 km/h和80 km/h时(见图5、图6、图7),分别加载阶跃扭矩到转向盘上,调整转向盘角度为120°,稳定3 s后松开转向盘,通过转向盘转角随时间的变化来验证不同车速工况下EPS的回正能力。

图5 20 km/h时的转向盘转角响应和电流曲线

图6 50 km/h时的转向盘转角响应和电流曲线

图7 80 km/h时的转向盘转角响应和电流曲线
仿真结果表明,在中低速回正时,EPS 系统在收到扭矩响应信号后3 s 内电流突变,系统处于助力控制过程,随后转向盘的转角趋于稳定,电流也逐渐稳定。3 s 后,转向盘进入回正过程,转向扭矩突变为零,回正电流迅速增大到最大值。在高速回正时,采用PD 回正控制,没有出现超调现象。在转向时,驾驶员施加在转向盘最大扭矩值在无助力控制、PID 控制和模糊自适应PID 控制下依次减小,这说明在采用转向控制后,转向盘输入扭矩明显降低,实现了对转向轻便性的改善。
6 结语
本研究对EPS 系统各部分模块进行整合,使用PID 控制和模糊自适应PID 控制方法,设计了助力电机电流控制器的模型,建立EPS 系统的Simulink与CarSim 仿真模型,仿真分析EPS系统在回正和转向状态下的转向轻便性和回正性能,对控制策略的合理性进行分析和验证。仿真结果表明,设计的控制策略满足EPS 系统的要求,实现了转向盘快速回正,没有回正超调现象,在提升回正性能的同时,也满足了转向轻便性的要求。
