单相有源前端级联H桥逆变器故障容错控制
2022-08-01孙熙晨林旭梅张明鹏
孙熙晨,林旭梅,张明鹏
(1.中共山东省委机关政务保障中心,济南 250001;2.青岛理工大学信息与控制工程学院,青岛 266520)
级联H桥逆变器具有模块化和谐波含量低等优点,广泛用于中压系统[1-3]。而H桥模块故障类型主要有:直流过电压或欠电压故障、功率开关器件结温过高故障和桥臂短路等故障。这些故障可以通过电压传感器、热敏电阻传感器或功率开关器件驱动进行辨识[4-5],并封锁控制脉冲信号,实现故障H桥模块隔离。与此同时,对剩余非故障模块可施加容错控制算法完成降额运行,文献[6]给出了H桥模块故障下级联H桥逆变器的调制策略,可保持三相平衡的输出线电压。
另一方面,在诸如传送带、轧钢机或固态变压器等工业应用场景,需要系统具备能量双向流动的能力[7-9]。此时通常配置三相有源前端整流器和多绕组变压器。为了进一步降低系统复杂度和成本,文献[10]引入了单相有源前端,单相有源前端级联H桥拓扑的输出结构与常规拓扑完全相同,故常规控制算法可直接应用。当H桥模块故障时,旁路掉故障模块后,逆变器输出侧仍可施加常规的容错控制算法,但配置单相有源前端则无法施加。因此,文献[11]设计了一种单相有源前端级联H桥逆变器新型控制方法,该方案将系统分为多级,并分别在各级电路中执行输入功率和直流侧电压控制。但当前端H桥模块故障且被隔离后,则可能出现一些非故障的模块无法与之配对运行的情况。此时,若采用文献[12]中单相H桥逆变器的输入功率控制策略,则可使得系统中所有非故障H桥单元得以运行。但与传统的三相二极管整流前端或三相有源前端级联H桥逆变器不同,对单个H桥模块输入功率的独立控制将导致并网电流中出现大量负序电流,不符合电网相关标准[13]。另一种思路是将故障的前端H桥模块及其对应的后端H桥模块一并隔离,保持每相模块数相同,使系统可施加常规控制策略,并不会带来并网电流谐波污染,但弊端是系统无法合成最大输出电压,同时降低了系统容量。
综上,本文提出了一种新型的单相有源前端级联H桥模块在前端H桥模块故障下的故障容错控制策略。新方案可完成输入功率和直流电压的控制,并确保在模块故障的情况下输出最大电压和功率。此外,新型容错控制策略还可实现模块故障下每个模块的直流电压和并网电流较好地调节。
1 前端模块故障和系统重构策略
图1 (a)和图1(b)分别为三相有源前端配置和单相有源前端的级联H桥逆变器。其中三相有源前端整流器需要接入单独的变压器副边绕组,故电网侧变压器需配置为多绕组变压器,与此对应,整流器需配置为三相整流器,以输出独立直流电至级联H桥逆变器,逆变器输出带电机或其他中压负载。而单相有源前端则直接规避多绕组变压器的使用,且整流器采用H桥拓扑即可,从而简化了系统,降低了成本,可将输入变压器次级绕组数量减少为原来的1/3,同时每个单元的桥臂数量减少到4/5。
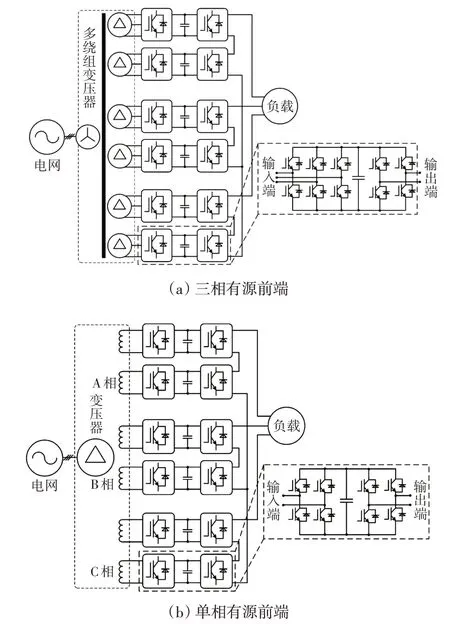
图1 级联H桥逆变器两种不同有源前端配置Fig.1 Two different active front-end configurations for cascaded H-bridge inverter
为简化分析,假设级联H桥逆变器为单级,如图2所示,同时变压器为理想变压器,无励磁电流、漏磁和损耗,且三相绕组平衡。图2中,变压器初级△绕组电流iab1,ibc1和ica1分别与整流器电流ia2、ib2和ic2耦合,电网三相电压为usa、usb和usc,并网电流为ia1、ib1和ic1。
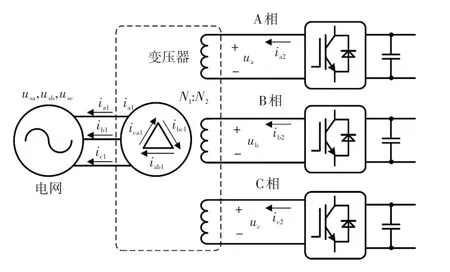
图2 单相有源前端拓扑Fig.2 Single-phase active front-end topology
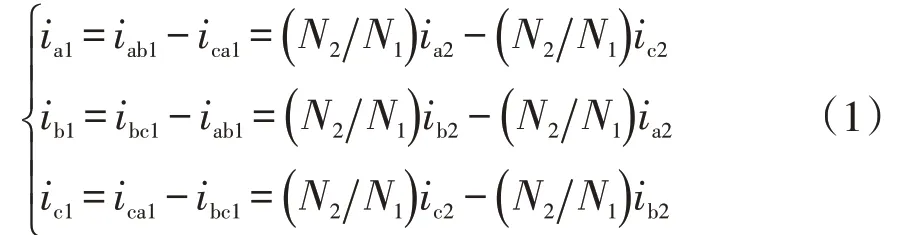
初级绕组和次级绕组的匝数分别为N1和N2,则在理想变压器假设下,各电流之间的关系为
变压器△绕组的环流i circ可表示为

如果将整流器电流控制为三相平衡,则环流icirc将保持为零。另一方面,H桥模块故障可分为单模块故障和双模块故障两类,如图3所示。
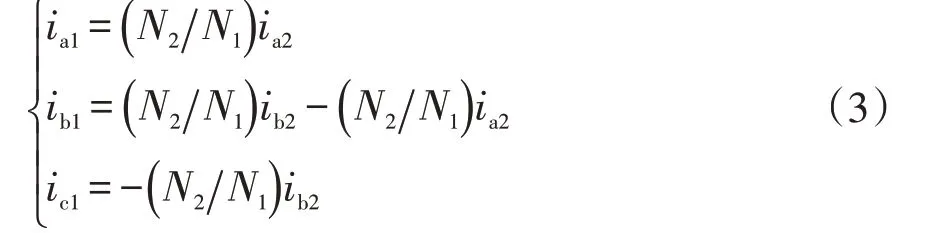
图3(a)为单H桥模块故障(假设为C相),故障模块隔离后ic2变为零,故式(1)改写为

图3 单相有源前端故障类型Fig.3 Fault types of single-phase active front-end
此时,将余下非零电流ia2和ib2调节为

式中:Im为电流幅值;ω为角频率;φ为相角。将式(4)代入式(3),可将ia1、ib1和ic1表示为
上述分析表明,按照式(4)控制余下两个非故障H桥模块的电流,则可将并网三相电流调节为平衡。
图3(b)为2个H桥模块故障(BC相),此时故障模块的输入端和电网脱开,ib2和ic2变为零,故式(1)改写为

在这种情况下,不可能仅通过余下的次级侧电流ia2来使得三相并网电流平衡。因此,只能将非故障的A相断开,以免在电网侧产生负序电流,从而后续仅考虑图3(a)中单模块故障的工况,式(4)代入式(2)可得

如果单相有源前端中的故障模块数量为N,则可使用叠加定律将环流icirc及其幅值 |icirc|表示为
考虑到双模块故障时,不可避免地要断开非故障模块,故要尽最大可能保留非故障模块的使用,避免大量H桥模块闲置,依照此原则,可根据分类讨论的思想,设计重构策略如下。
(1)当存在1个H桥模块故障时,如A相存在1个前端模块故障单元,则无闲置H桥模块,无需重构可直接容错运行。
(2)当存在2个H桥模块故障时,在同相时,也无需重构可直接容错运行。当不在同相时,需进行重构,例如对于5个H桥模块级联拓扑,若B相存在2个前端模块故障单元,则表示为“5-4-4”,此时需非故障模块组合(A2,B2,C2)、(A3,B3,C3)、(A4,B4,C4)和(A5,B5,C5),可完成输入功率和直流电压控制,但A1模块需断开。故对“5-4-4”进行重构,即C4块与A1模块组合,则A1模块无需隔离,仍可继续使用,保留了系统最大功率。
(3)当存在3个H桥模块故障时,若在同相,则无需重构,若完全在不同相,也无需重构,但是当2个位于同相,则需进行重构。例如对于5个H桥模块级联拓扑,若B相存在1个前端模块故障单元,C相存在2个故障单元,如图4(a)所示,则表示为“5-4-3”,此时非故障模块组合(A3,B3,C3)、(A4,B4,C4)和(A5,B5,C5),以及单模块故障容错组合(A2,B2)可完成输入功率和直流电压控制,并基于式(4)实现并网电流的三相平衡,但A1模块需断开。但若对“5-4-3”进行重构,即C3模块与A1模块组合,则可得到如图4(b)所示拓扑,此时A1模块无需隔离,仍可继续使用。由于H桥模块的输入之间无电联接,而只是通过变压器实现磁性连接,故系统重构较为方便,从而最大化可使用H桥模块数量,进而增大系统容错运行时的容量。
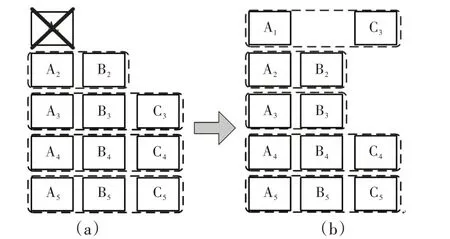
图4 H桥模块故障后系统重构示例Fig.4 Example of system reconfiguration with H-bridge cells failure
(4)依次类推,当有n个H桥模块故障时,根据不同模块所在相,当可以进行进行两两组合配对时,就进行系统重构,从而实现容错运行,增大系统容错运行时的容量,反之则无需重构,直接可容错运行,此时便已是系统最大容量。
2 容错运行控制策略
单相有源前端级联H桥逆变器系统容错运行时,将存在功耗不均的现象,若没有适当的直流电压控制,诸如图4中单模块故障组合(A2,B2)中的直流电压差将增大,可引起直流过电压故障。因此,系统容错运行控制策略中需增加基于输入电流调节的直流电压控制。
2.1 有功电流和无功电流
电网电压平衡时,usa、usb和usc的相角可表示为0、-2π/3和2π/3。此外,基于式(4)进行ia2和ib2调节,可确保并网电流三相平衡。式(4)中ia2和ib2可描述为由2个正交分量构成,即
式中:ia2F和ib2F为所定义的有功电流;ImP为有功电流幅值;ia2R和ib2R为所定义的无功电流,ImQ为无功电流幅值。当有功电流通过式(5)转换到电网侧时,将感应出与电网电压同相的三相平衡电流,故有功电流可从电网获取有功功率。而无功电流通过式(5)转换到电网侧时,感应出与电网电压正交的三相平衡电流,故无功电流可从电网获取无功功率。由式(10)可反推ImP和ImQ的表达式为

将上式定义为有功和无功坐标变换,即AR变换,各电流之间的变换关系如图5所示,其中i d1e和i q1e分别为并网电流d、q轴分量,且和,即AR轴分量和dq轴分量是匹配的。

图5 电流变换关系Fig.5 Relationship of current transformation
有功和无功电流与电压的相位关系如图6所示。电网线电压usab和usbc以A相电压ua和B相电压ub的形式转换到变压器次级侧,与图3(a)对应。ua和ub的相角与usab和usbc的相角相同,为π/6和-π/2。设电网相电压幅值为Usm,则usab和usbc的幅值为1.732Usm,ua和ub的幅值为1.732。由图6可计算模块有功和无功功率为
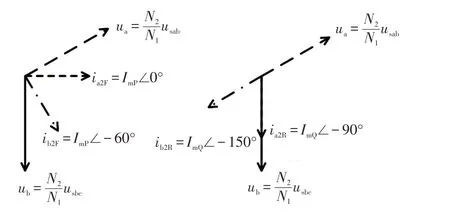
图6 有功和无功电流与电压的相位Fig.6 Phase of active and reactive currents and voltages
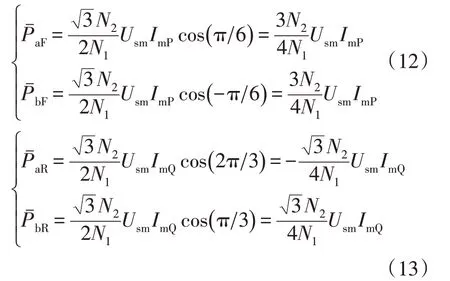
式中:、、和分别为AB相有功和无功电流对应的平均功率。考虑到=,故有功电流可控制直流电压平均值。同时和之和为零,即幅值相同且符号相反,故可将其用于控制模块间直流电压差异。因此,通过调节有功和无功电流,可独立控制故障容错运行时的H桥模块直流电压,同时保持并网电流三相平衡。
2.2 直流电压控制
直流电压控制的目标为:在任意负载条件下,将系统容错运行时的直流电压调节至设定值。故直流电压控制器包含两部分:一是平均直流电压控制器;二是直流电压平衡控制器。其中平均直流电压控制器结构如图7所示。
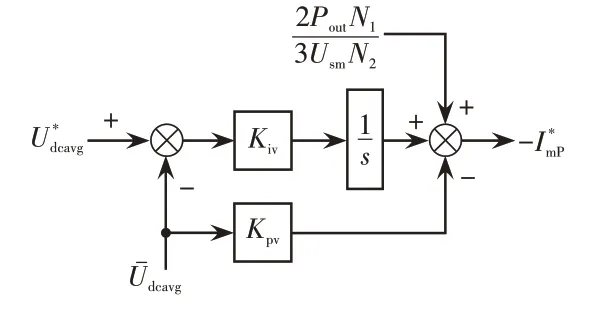
图7 平均直流电压控制器结构Fig.7 Average DC voltage controller
闭环控制方程为

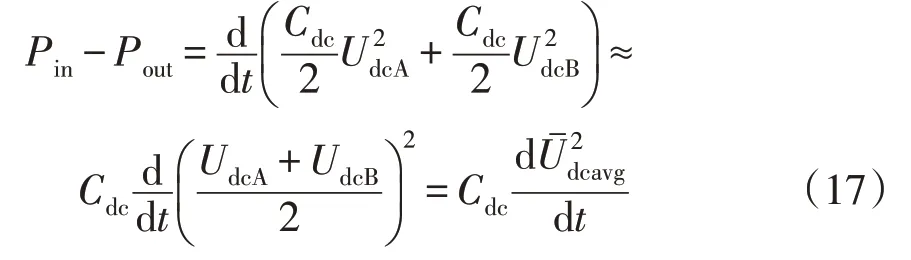
式中:Kpv和Kiv为比例和积分增益;和为直流电压平均值和设定值;Usm为电网相电压幅值;为输出功率计算值;为有功电流参考幅值。直流电容储能的微分为

式中:Cdc为直流电容容值;UdcA和UdcB分别为A相和B相H桥模块的直流电压;Pin和Pout分别为电网输入功率和负载侧输出功率,其中Pin的计算式为。若UdcA和UdcB得到较好调节,则有

然后,式(15)可重写为
如果在稳态值Udc0附近变化,则在小信号分析下,控制闭环方程可推导为

进一步,平均直流电压控制器的传递函数可表示为二阶低通滤波器的形式,即
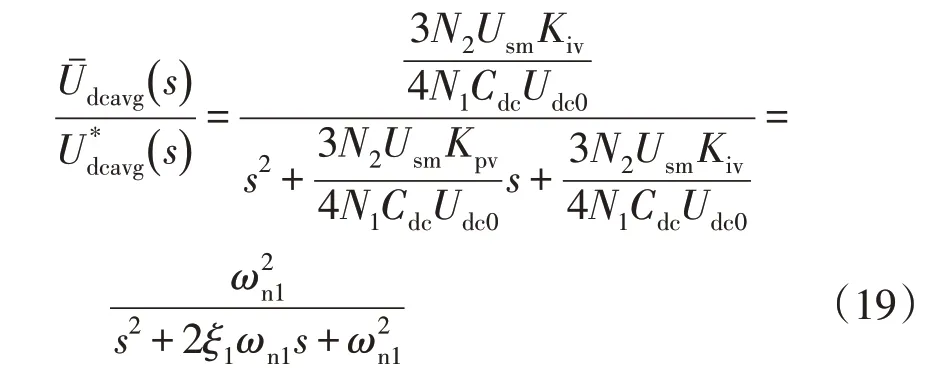
式中,ξ1、ωn1分别为滤波器阻尼因子和固有频率。Kpv和Kiv可由ξ1和ωn1描述为

平均直流电压控制器的带宽为

直流电压平衡控制器结构如图8所示。
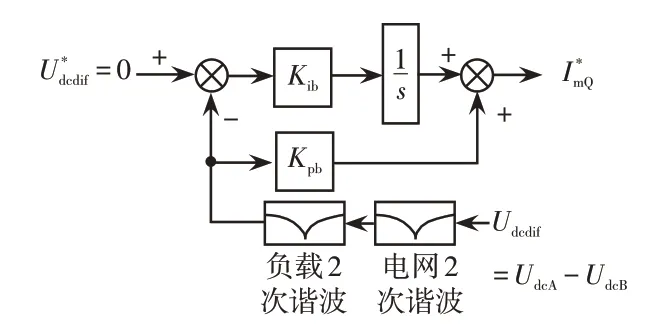
图8 直流电压平衡控制器结构Fig.8 DC voltage balance controller
如前所述,配置直流电压平衡控制器是为了抑制直流电压差Udcdif=UdcA-UdcB,考虑到电网和负载2次谐波,直流电压的波动都会均有不可控的扰动,而2次谐波扰动属于单相H桥拓扑结构固有的功率振荡,分析如下,设单相整流器输入电压ua和输入电流ia2分别为

式中:Us和Is分别为ua和ia2有效值;ωs为供电频率;ξ为电压ua超前电流ia2的相角。依据积化和差变换原理,整流器输入功率PinF可表示为

整流器输出功率PoutF包含直流分量及脉动分量,可表示为

式中,uh为整流器输出电压脉动分量,由能量守恒,联立式(24)和式(25)可推导uh为

可见,整流器输出电压的脉动频率2倍于电网网电压频率,例如当电网频率为50 Hz,负载侧频率为45 Hz,则单相有源前端级联H桥逆变器系统中所有模块的直流电压均存在100 Hz和90 Hz的纹波。2次谐波分量较难通过控制算法来控制的,故考虑配置2个对应频率点的陷波滤波器在闭环控制器中,见图8。陷波滤波器不在平均直流电压控制器中使用,因为计算时,2次谐波纹波会被抵消。
直流电压平衡控制器闭环控制方程为

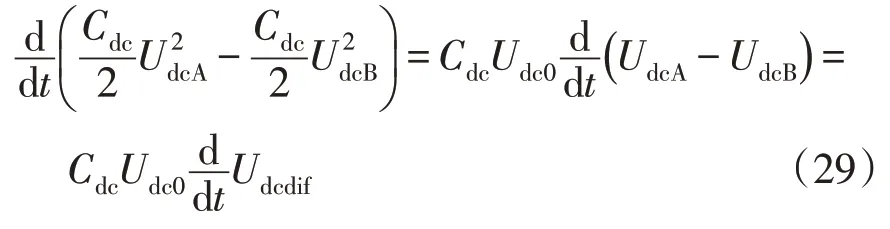
式中,Kpb和Kib为比例和积分增益。直流电容储能的微分为
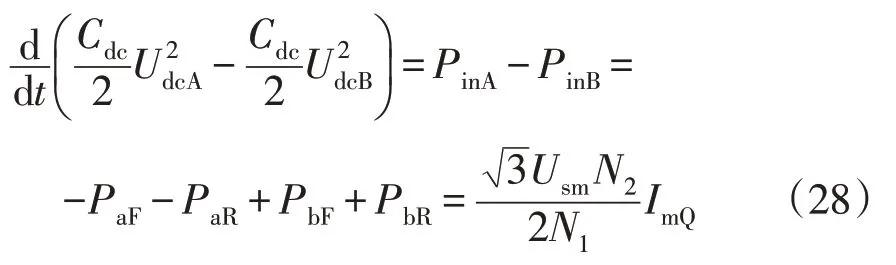
式中,PinA、PinB分别为A、B相的输入功率。假设UdcA和UdcB在Udc0附近变化,则由小信号分析可得
式中,Udcdif为UdcA和UdcB之差。联立式(28)和式(29)可得:

若ImQ较好地跟踪I*mQ,则联立式(27)和(30)得
类似地,直流电压平衡控制器的传递函数也可表示为二阶低通滤波器的形式,即
式中,ξ2、ωn2分别为直流电压平衡控制器对应滤波器阻尼因子和固有频率。Kpb和Kib可由ξ2和ωn2描述为

2.3 基于AR坐标变换的电流控制
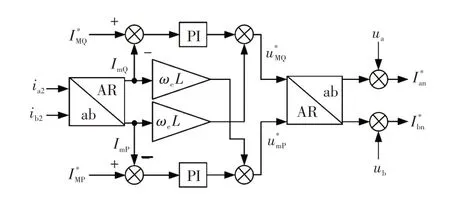
图9 电流控制器结构Fig.9 Current controller
变压器次级电压ua通过数字延迟采样后才能得到前馈项uaff,两者间存在差值uaerr,而uaerr为具有采样频率谐波分量的工频正弦波形。类似的,BC相也具有误差uberr和ucerr。uaerr、uberr和ucerr将被表示为正序电压,这会产生额外的正序电流,从而闭环电流控制器可抑制这些误差电压。然而,故障容错运行时,uaerr和uberr会感应出幅值相等相差为2π/3的电流ia2err和ib2err,即
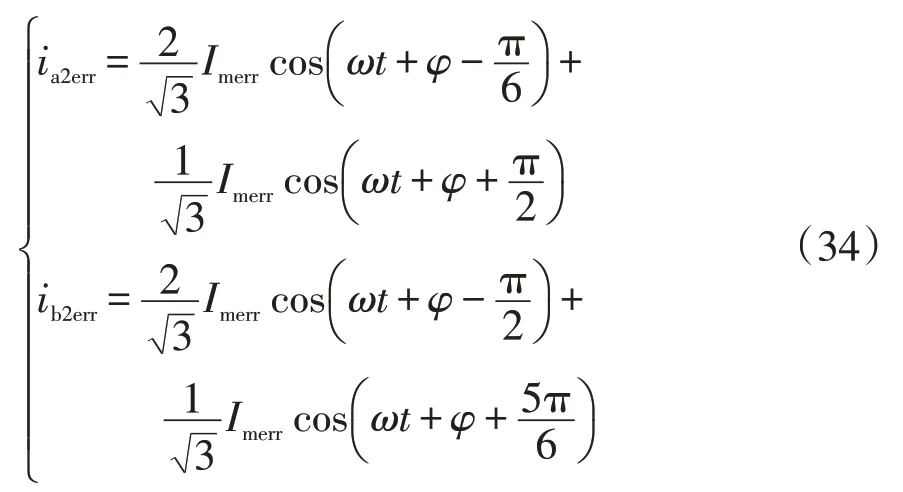
式中,Imerr为ia2err和ib2err的幅值。ia2err和ib2err的表达式右侧第一项均将在电网侧转换为正序电流,而第二项则均成为负序电流,且无法进行AR变换。将ia2和ib2表示为正负序分量组合的形式,即
式中:ia2p和ia2n分别为ia2的正序和负序分量;ib2p和ib2n分别为ib2的正序和负序分量;Imp和φp分别为电流正序分量的幅值和相角;Imn和φn分别为电流负序分量的幅值和相角。为迫使负序电流为零,增设了负序电流控制模块在电流控制器中,如图10所示,通过使用二阶广义积分器[14-15],可以从ia2和ib2中提取出负序电流ia2n和ib2n,然后通过AR变换得到ImQn和ImPn,进行电流PI调节后得到负序电流控制输出和。最后,将和与图9中正序电流控制器的输出和叠加得到作为电流控制器最终的控制输出。
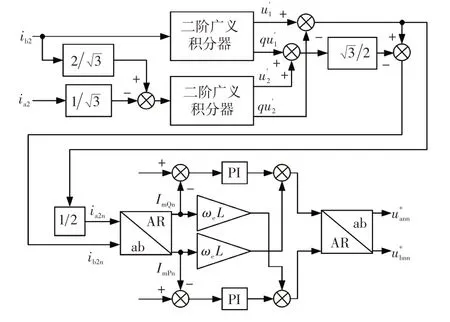
图10 负序电流控制器结构Fig.10 Negative-sequence current controller
3 负载对电网功率因数的影响
在常规背靠背系统中,尽管负载侧存在负序电流、谐波电流或无功功率,但均会被直流电容滤除。因此,负载侧谐波不能反馈至电网侧。但单相有源前端级联H桥逆变器系统在故障容错运行下,负载侧功率因数会影响到电网侧功率因数,下面以“2-2-1”模式故障容错运行为例进行分析,如图11所示。
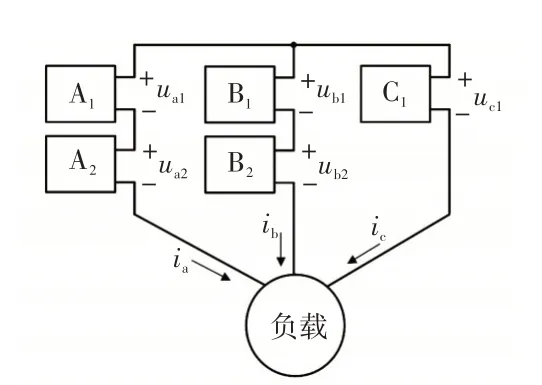
图11 “2-2-1”模式故障容错运行示意Fig.11 Schematic of fault-tolerant operation in“2-2-1”mode
考虑负载功率因数角后的相位关系,当模块故障时,三相线电压保持平衡,如图12所示。
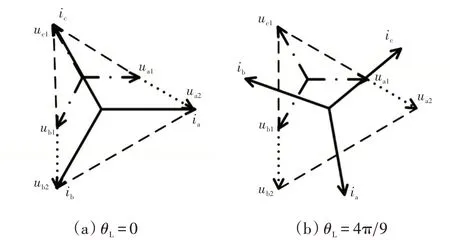
图12 “2-2-1”模式故障容错运行相位Fig.12 Phase of fault-tolerant operation in“2-2-1”mode
点划线对应模块A1、B1和C1的输出电压ua1、ub1和uc1,幅值相同且具有120°的相移。若负载电流ia、ib和ic平衡,则不管负载功率因数如何,每个模块始终具有相同的功率因数,并可用负载功率因数角θL表示为

式中:θua1、θub1和θuc1分别为ua1、ub1和uc1的相角;θia1、θib1和θic1分别为ia、ib和ic的相角。图11中模块A2和B2产生蓝色实线矢量ua2和ub2,幅值相同,相位差为π/3。模块A2和B2的功率因数PFA2和PFB2将随负载变化如下:

式中,θua2和θub2分别为ua2和ub2的相角。当负载功率因数角θL为0或π时,有PFA2=PFB2,但其他情况下则彼此不匹配,例如图12(b),θL=4π9滞后,则PFA2=0.643和PFB2=0.342,对应模块A2为负载供电,而模块B2则从负载处吸收能量。此时,需较大无功电流来平衡A2和B2的直流电压。故系统容错运行时,负载对电网侧功率因数有影响。但工程上,逆变器所带负载功率因数接近1,因此可由正常运行时设计的系统电流裕量包容,即可通过正常运行模块组合来补偿来自容错运行模块引起的d轴电流,故电网侧功率因数仍可被调节为1。
4 实验验证
为验证所设计的单相有源前端级联H桥逆变器系统前端H桥模块下的故障容错控制策略,进行了实验验证,实验系统如图13所示,其主体为三相感应电机驱动系统,其通过单相有源前端供电,整个系统并入了电网。实验系统可进行“2-2-1”故障模式容错运行测试,其中故障模块为C2,故障后即被系统旁路。通过将输入H桥模块划分为故障容错组合和非故障组合来实现系统输入功率控制。负载设置为感应电机,即单相有源前端级联H桥逆变器驱动感应电机系统,实验系统参数如表1所示。表1中的符号基本上公式中没有出现,是实验装置的实际参数,比如电机的参数。考虑到系统在“2-2-1”故障模式容错运行下,最大线电压为额定值的78.8%,故感应电机转速控制在额定值的75%较为合适。由于实验系统容量较小,不配置额外的输入滤波器来降低并网电流谐波。
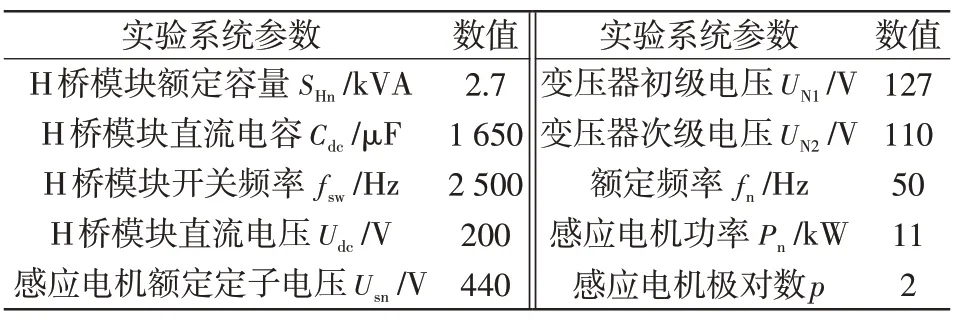
表1 实验系统参数Tab.1 Parameters of experimental system
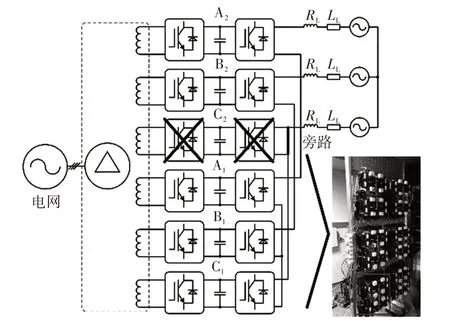
图13 实验系统Fig.13 Experimental system
系统检测H桥模块C2故障后,完成“2-2-1”故障模式重构后的启动运行波形如图14所示,其中图14(a)为故障容错组合中H桥模块直流电压实验波形,图14(b)为故障容错组合前端输入电流波形。图中所示,t<80 s,系统处于故障后停机状态,续流二极管对直流侧电容充电,H桥模块A2直流电压UdcA2和H桥模块B2直流电压UdcB2初始为155 V,t=80 s,系统启动,此后故障容错控制算法与直流电压控制配合使用,动态在80 s<t<200 s持续,t>200 s后直流电压被调节为200 V,动态时间约120 s左右,超调量小于10 V,故障容错组合H桥模块A2和B2对应前端输入电流ia22和ib22均增加,动态过程中瞬态电流最大值约为15 A,ia22和ib22间的相位差很好地控制为60°。
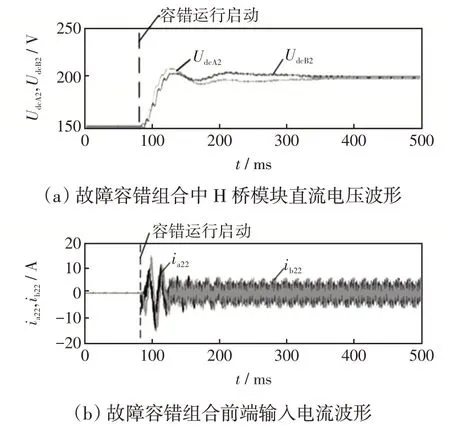
图14 故障容错启动运行实验结果Fig.14 Experimental results of fault-tolerant startup
系统在“2-2-1”故障模式容错运行下故障容错H桥模块组合A2和B2对应直流电压UdcA2和UdcB2波形如图15(a)所示,系统在“2-2-1”故障模式容错运行下正常H桥模块组合A1、B1和C1中直流电压UdcA1、UdcB1和UdcC1波形如图15(b)所示,图15中所有系统非故障运行的H桥模块在直流电压稳压控制下,均保持在200 V附近,最大纹波小于25 V,主要纹波频率为负载和电网频率的2倍频(100 Hz和90 Hz)。
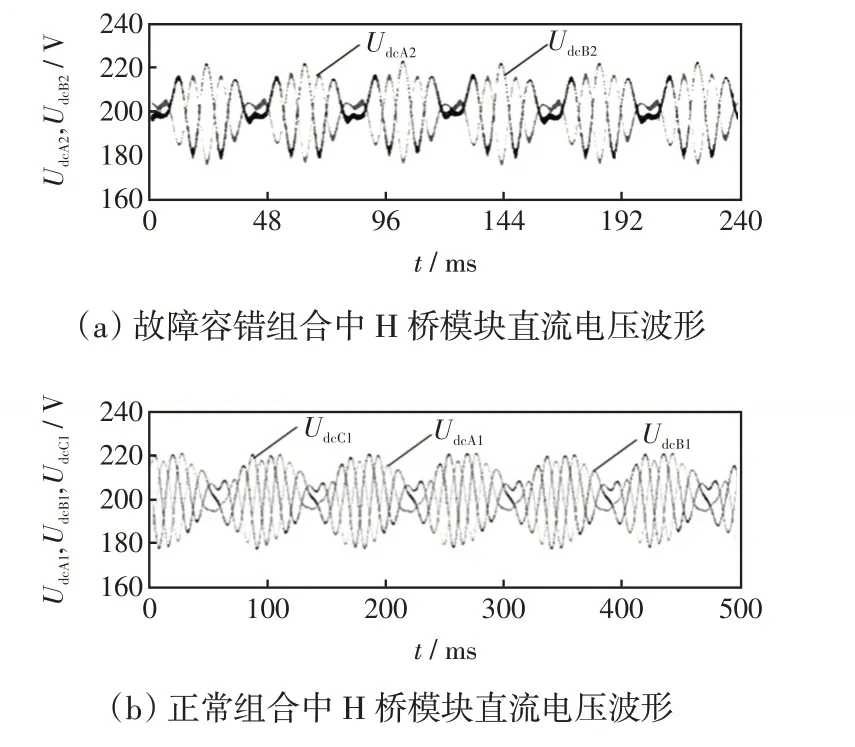
图15 容错运行下H桥模块直流电压波形Fig.15 DC voltage waveforms of H-bridge module under fault-tolerant operation
容错运行稳态时,感应电机以45 Hz的频率驱动,定子相电压uan、ubn和ucn的波形见图16(a),其中ucn为五电平,因为在C相中存在H模块故障,而uan和ubn为九电平,因为余下两相中无H模块故障,故保持正常输出电压电平数。图16(b)为定子线电压uab、ubc和uca的波形,三相幅值相同为600 V,和预期额定值的75%接近,相差恒为2π/3。
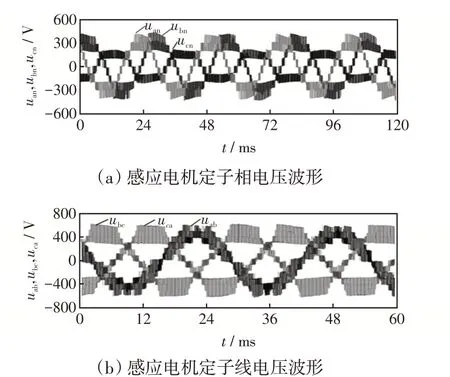
图16 感应电机电压波形Fig.16 Voltage waveforms of induction motor
故障容错组合和正常组合前端输入电流ia22、ib22和ia21、ib21及ic21波形如图17(a)和图17(b)所示,前者在容错控制下保持两相输入电流为等幅值,且相差为π/3,而后者则仍保持三相对称输入电流。
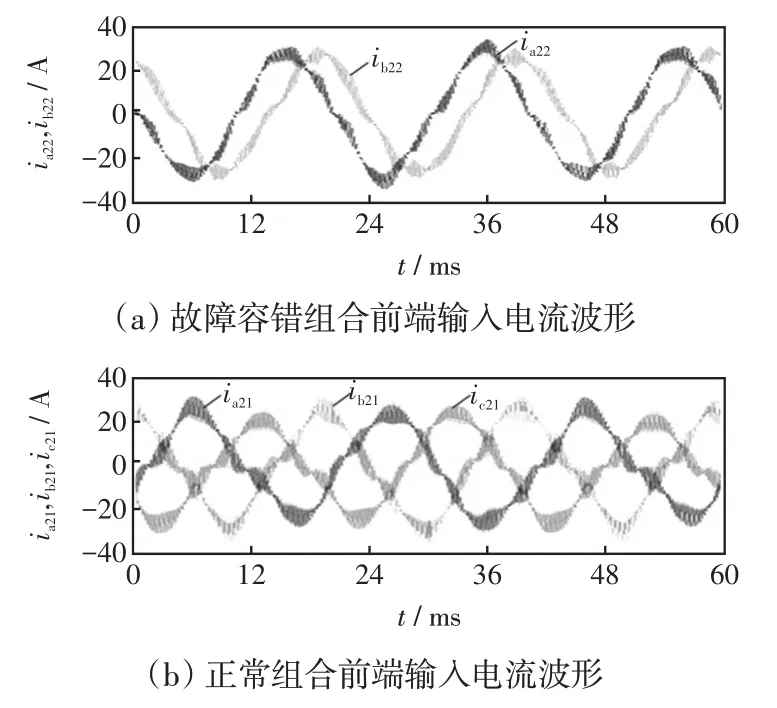
图17 前端输入电流波形Fig.17 Waveforms of front-end input current
变压器初级△绕组三相电流iab1、ibc1及ica1和环流icirc实验波形如图18(a)和(b)所示,其中环流波形验证了其计算式,即式(8)。并网电流ia1、ib1和ic1波形如图18(c)所示,可以看出即使在前端H桥故障情况下,并网电流仍被调节为三相平衡,且THD小于4%。
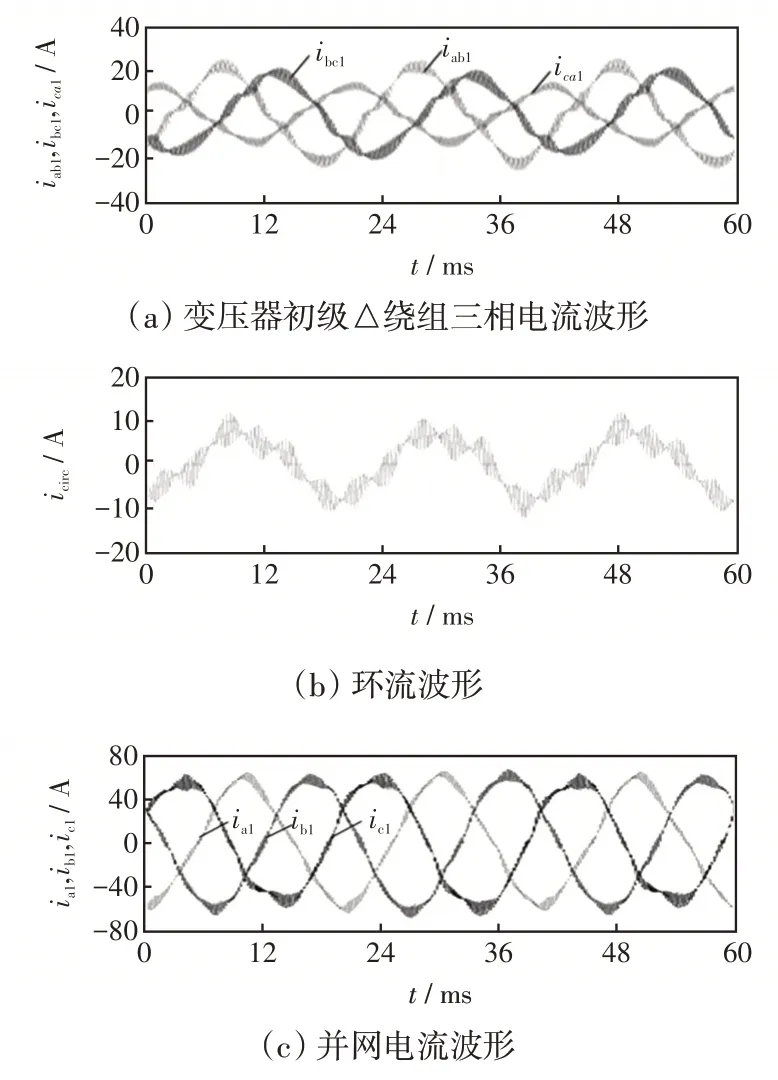
图18 网侧实验波形Fig.18 Experimental waveforms on grid-side
5 结论
本文设计了单相有源前端级联H桥逆变器系统在前端H桥模块故障时的容错运行控制方案,总结全文可得如下结论:
(1)通过分析各电流之间的关系,得到了并网电流三相平衡下的变换器电流规律,并据此设计了系统故障重构配置方案;
(2)重构系统可最大程度地保留原系统容量,将最多数量的H桥模块参与系统运行;
(3)提出了基于AR坐标变换的容错运行电流控制策略,可保持并网电流平衡且少谐波;
(4)实验结果表明,在前端H桥模块故障时,所设计的容错控制方案可较好地控制直流电压和平衡并网电流,并提升系统容错运行容量。
