基于MMOAFSA蒸汽压缩式制冷机组的双参数前馈解耦PID控制策略研究
2022-08-01阴志杰李绍勇李东升
阴志杰 李绍勇 李东升 杨 睿
(兰州理工大学土木工程学院 兰州 730050)
0 引言
蒸汽压缩式制冷机组(Vapor Compression Refrigerating Unit,VCRU)一般由压缩机、冷凝器、热力或电子膨胀阀和蒸发器构成,其中蒸发器在制冷循环中发挥着关键作用,即将低温低压的液态制冷剂进行气化,释放制冷量给空调冷冻水,从而对夏季的空调房间进行降温[1],满足室温Tn等于其设定值Tn,set的空调设计需求。蒸发器的热工性能可通过两个重要参数-蒸发温度Te和过热度Dsh来表征,而Te和Dsh测量值是否满足制冷工艺所要求的相应设定值Te,set和Dsh,set,对于实际运行中的蒸发器和VCRU 具有重要意义[2]。因此,对Te和Dsh施加恰当的控制方式,确保Te≈Te,set和Dsh≈Dsh,set,可满足蒸发器及其VCRU 的安全、稳定与节能运行需求。
从控制角度来看,关联Te和Dsh的蒸发器这个被控对象具有结构参数时变、惯性大和时延等特性,采用传统PID 控制策略,往往导致Te和Dsh的稳态误差和超调量较大、调节时间较长等问题[3],会影响蒸发器运行的稳定性。同时,Te和Dsh的控制回路之间还存在耦合效应,该耦合效应会使得Te=Te,set和Dsh=Dsh,set的预期控制效果下降。此外,蒸发器这个被控对象还存在较大的时滞τ,该时滞会使得Te和Dsh的控制系统稳定性下降。这些均导致蒸发器及其VCRU 运行性能降低和Te和Dsh动态响应变差[4]。因此,Te和Dsh控制问题及其VCRU运行模式的研究,成为当前空调与制冷装置自动化领域的一个研究热点。
针对复杂非线性的双输入双输出的VCRU,尚羽佳等[5]将无模型控制方法应用其节能控制方案中。仿真结果表明,过热度和蒸发温度的控制效果稳定,且动态响应得到了改善。张腾飞等[6]将PID控制器与改进型Smith 预估器相结合,实现了制冷系统中过热度与蒸发温度的双回路Smith预估解耦PID 控制。设计扰动观测器对系统的集中扰动进行估计并进行前馈补偿。结果表明,该系统的抗干扰能力和跟踪性能均得到了提升。文献[7]采用自适应PID 控制器来控制冷凝器与蒸发器之间的电子膨胀阀开度OEEV。这样PID 控制器的3 个参数(KP,KI,KD)是连续整定的,可适应室温被控对象的结构参数变化。既动态改变OEEV和调控进入蒸发器的液态制冷剂流量qr,又满足快速调节室温Tn需求。
PID 控制方式由于其结构简单、鲁棒性强和可靠性高等特点因而在工业过程参数的控制中得到了广泛的应用。其控制效果主要取决于相应PID 控制器参数的整定[8],所以不少学者关注PID 控制器参数的整定算法研究。为了对光电伺服系统中的光束进行高精度,稳定的跟踪,肖冰冰等[9]引入一种改进的萤火虫算法(Improved Firefly Algorithm,IFA)对PID 控制器的参数进行优化整定。结果表明:对于该光电伺服系统(Photoelectric Servo System,PSS)相比Z−N 法,改进的萤火虫算法对PID 控制器参数进行优化整定后,光束控制系统的响应速度、带宽和跟踪精度分别提高了40%,33.3%和25%。Chen 等[10]采用粒子群优化算法(Particle Swarm Optimiz-ation Algorithm,PSOA)对电机伺服驱动系统(Motor Servo System,MSS)的PID 控制器参数进行整定,结果表明该控制方法使得系统的动态性能和稳态性能得到了显著的提高,其超调量、响应速度和ITAE 都有着显著改善。
然而,衡量PID 控制系统质量的指标,如稳定性、快速性以及准确性等是一个相互制约的关系,同时满足这些指标很困难[11]。Gilberto 等[12]将多目标优化方法应用于制冷压缩过程中的Te与Dsh控制问题。将评价指标:积分绝对误差(Integral Absolute Error,IAE)、控制量的总变化量(Total Variation,TV)和闭环对数模量(Closed loop Log Modulus,LCM)作为Te和Dsh的PID 控制器参数整定算法的目标函数,实现了对6 个控制器参数连续、多目标优化的整定,并取得了预期的Te和Dsh控制效果。文献[13]采用改进多目标粒子群算法,以轨迹跟踪偏差(Trajectory Tracking Error,TTE)和控制器输出力矩(Controller Output Torque,COT)作为目标函数,对机器人轨迹跟踪模糊PID 控制器中的162个参数进行优化整定。仿真结果表明了该方法对机器人轨迹跟踪控制的有效性和优越性。
综上,考虑密切Te和Dsh的蒸发器这个被控对象具有结构参数时变、惯性大和时延等特性及其Te和Dsh的控制回路之间存在耦合效应,为进一步提高Te和Dsh控制质量,本文提出蒸发温度与过热度前馈解耦PID 控制策略的设计理念,即VCRU双参数前馈解耦PID 控制系统(Two-Parameter Feed-forward Decoupled PID Control System for VCRU−TPFDPIDCS),构建前馈解耦补偿器的传递函数矩阵,消除这两个控制回路之间的耦合效应。同时,对于Te和Dsh的PID 控制器参数整定问题,依据基本型单目标人工鱼群算法,对人工鱼的视野V和步长S进行指数递减变化,构建MSOAFSA。再将多目标优化的混沌局部搜索策略引入MSOAFSA,得到MMOAFSA。以min(ITAE,tc,Ess)作为它的3 个目标适应度函数,设计出Te和Dsh的PID 控制器参数整定算法MMOAFSA,来获取相应的参数最佳值和3 个目标函数的Pareto 最优解。仿真结果表明,该MMOAFSA 是可行的,能求解出两个PID 控制器参数的最佳值和ITAE、tc和Ess的Pareto 最优解。同时本文提出的VCRU−TPFDPIDCS 可消除两个控制回路之间耦合效应,Te和Dsh的调节品质得到明显提升。
1 VCRU 的蒸发温度与过热度控制
1.1 单级制冷循环工艺
如上所述,VCRU 包括压缩机、冷凝器、热力或电子膨胀阀和蒸发器。蒸发器发挥着将低温低压的液态制冷剂进行气化,释放制冷量给空调冷冻水的作用,实现对夏季的空调房间进行降温,满足室温Tn≈Tn,set的空调设计需求。采用电子膨胀阀的VCRU 单级制冷循环工艺[2],相应的测控流程图如图1所示。
分析图1:由蒸发器排出的低温低压制冷剂蒸汽被压缩机吸入,再经过压缩机的做功,使其变成高温高压的制冷剂蒸汽后排入冷凝器。在冷凝器中与空调冷却循环水进行热量交换,而被冷凝为高压高温的液态制冷剂。该高压高温的液体制冷剂再经电子膨胀阀节流降压后,变成低压低温的液态制冷剂进入蒸发器。低压低温的液态制冷剂在此吸收空调循环冷冻水的热量,使得空调循环冷冻水的温度由12℃降低为7℃;同时变成低压低温的制冷剂蒸汽,被压缩机吸入。这样,经过压缩、冷凝、节流和蒸发四个热力过程的循环,制冷剂将从低温物体吸收的热量不断地传递到高温热源中去,从而达到制冷与降温的目的[1]。
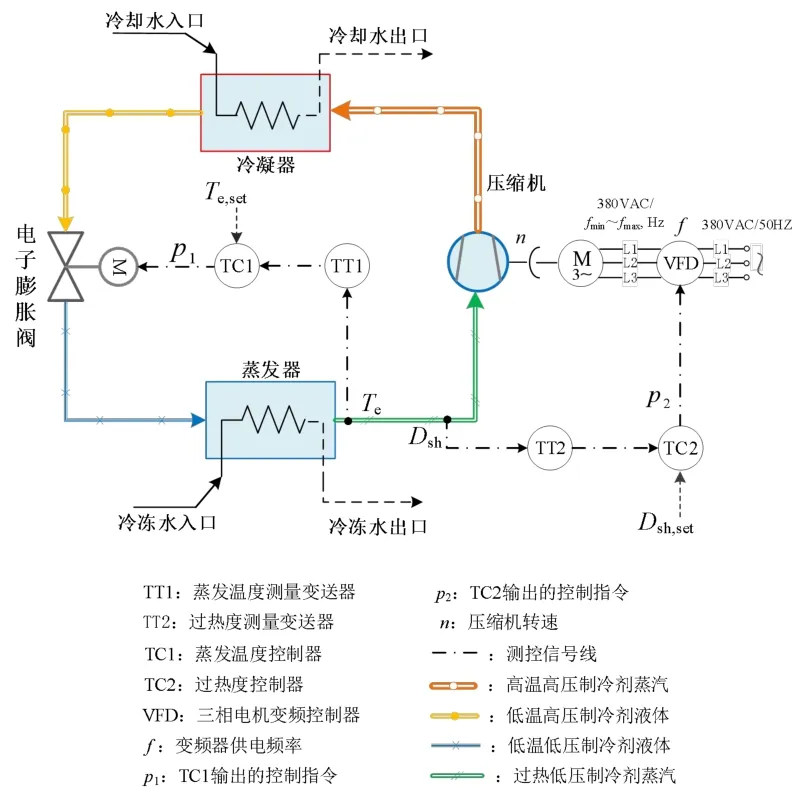
图1 VCRU 单级制冷循环工艺的测控流程图Fig.1 Flowchart of measurement and control for VCRU with one stage refrigeration circulating process
这里,存在关联Te和Dsh的两个测量、控制环路1 和2。测量、控制环路1:TT1 将反映蒸发温度大小的标准电流信号Te传递给TC1,进行求偏差ΔTe=Te,set-Te,对ΔTe进行PID 运算后,输出控制指令p1给电子膨胀阀EEV。改变其开度OEEV,动态调节流入蒸发器的液态制冷剂流量qr,使得Te≈Te,set。测量、控制环路2:TT2 将反映过热度大小的标准电流信号Dsh传送给TC2,先进行ΔDsh=Dsh,set-Dsh运算,然后将ΔDsh也进行PID 运算后,输出控制指令p2给变频器VFD。VFD 则输出变化的供电频率信号f,使得压缩机的转速n动态改变,确保Dsh≈Dsh,set。
1.2 蒸发器中的两个控制回路的耦合作用
如上所述,表征蒸发器性能的2 个参数Te和Dsh,对应两个控制环路:电子膨胀阀开度OEEV—蒸发温度Te和压缩机驱动电机的供电频率f—过热度Dsh。相应的被控参数Te和Dsh,记为y1和y2;相应的调节参数OEEV和f,记为u1和u2。用矩阵表示,即调节参数U=[u1u2]T,被控参数Y=[y1y2]T
由于存在耦合效应。可借助矩阵分析法,建立这两个控制回路的耦合传递函数矩阵。故两个控制回路的耦合传递函数关系可表示为Y=Gi,j(s)U。这里,Gi,j(s)(i=1,2;j=1,2)表示第j个调节参数uj与第i个被控参数yi之间的传递函数,如Gi,1(s)(i=1,2)表示第1 个控制回路中的调节参数u1(OEEV)分别对两个控制回路中的被控参数y1(Te)与y2(Dsh)造成的影响。故,蒸发器中的Te和Dsh控制回路之间的耦合传递函数矩阵,如下式所示:

由文献[3]中的相关数据,式(1)可改写为:

分析上式,可知第1个控制回路中的调节参数VEEV变化除了对该回路的被控参数Te产生作用外,还会影响到第2个控制回路中的被控参数Dsh。同时,第2个控制回路中的调节参数f变化除了对该回路的Dsh产生作用外,也会对第1个控制回路中的Te存在着影响。因此该耦合效应会使得Te=Te,set和Dsh=Dsh,set的预期控制效果下降。
1.3 双参数前馈解耦PID 控制系统
针对上述2个控制回路之间出现的相互影响,本研究采用前馈补偿控制的方式对该2个控制回路进行解耦,使之成为两个独立的无相互影响的参数PID控制系统。基于不变性原理[14],考虑Te和Dsh控制回路之间控制量U与被控量Y的相互作用,相应的蒸发器双参数前馈解耦补偿器的传递函数Fij(s)(i=1,2;j=2,1),如式(3)所示。

将式(3)所示的前馈解耦补偿器Fij(s)与蒸发温度和过热度的PID控制回路相综合,本文提出的双参数前馈解耦PID控制系统,如图2所示。
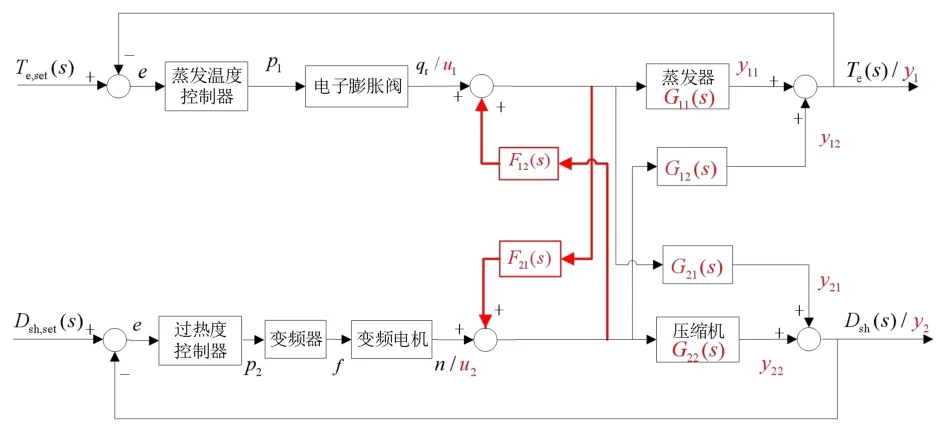
图2 双参数前馈解耦PID 控制系统方框图Fig.2 Block diagram of two-parameter feedforward decoupling PID control system
这样,通过解耦补偿器F12与F21的添加,可消除一个控制回路中的控制量uj(j=1,2)对另一个控制回路中的被控量yi(i,j=12)的耦合影响,使之成为两个独立的控制回路。即,蒸发温度PID控制系统通过操纵电子膨胀阀开度OEEV,改变进入蒸发器的液态制冷剂流量qr,实现Te=Te,set的制冷工艺目的;而不会对Dsh产生影响。过热度PID控制系统通过操纵压缩机驱动电机的供电频率f,改变压缩机转速n,满足Dsh=Dsh,set的制冷工艺需要;同样不会对Te产生影响。
2 改进的多目标人工鱼群算法及其PID控制器参数的整定
2.1 多目标优化原理
多目标优化是对多个所设计的目标函数同时进行优化,获取这些目标函数的最佳值。然而,这些被同时优化的目标函数之间往往是相互冲突的,不能同时达到最优,因此在多目标优化过程中会在多个目标问题之间寻求一个平衡值,从而得出这些目标函数的Pareto最优解[15]。
一般而言,具有r个目标的多目标问题优化,相应的最小化求解,如式(4)所示[12]:
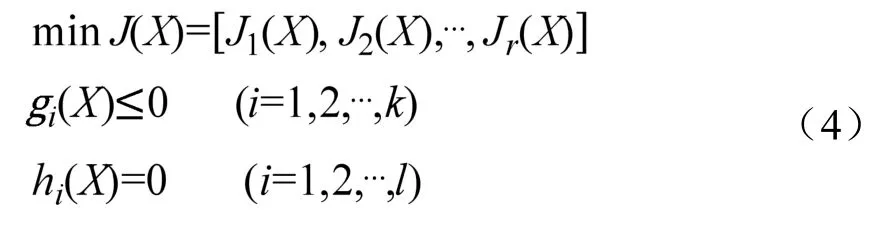
式中,X=(x1,x2,…,xn)为决策向量,其中n为决策变量数;gi(X)≤0为不等式约束;hj(X)=0为等式约束;r为目标数量;i为约束个数;J为目标函数。
2.2 改进多目标人工鱼群算法
(1)改进单目标人工鱼群算法
人工鱼群算法是一种基于模拟鱼群行为的优化算法,基本型单目标人工鱼群算法BSO AFSA随机、觅食、聚群、追尾行为如式(5a)—(5d)所示[16]:

式中:i为迭代次数;n为人工鱼;为人工鱼的当前状态;为执行行为后状态、Random(V)为随机视野;Random(S)为随机步长;Xj为执行觅食行为:随机视野范围内搜索的任意状态;Xc为聚群行为:领域中人工鱼的中心位置状态;Xm为追尾行为:领域中人工鱼的最优状态。
由于视野V和步长S是人工鱼群算法中是两个重要参数,直接影响着鱼群的活动行为选择。然而,固定的V和S会导致BSOAFSA 的求解易陷入局部最优,且收敛速度和寻优精度降低[16]。故本文对BSOAFSA 中的V和S进行适当改变,即V和S随着i的增加,而指数递减;其他参数不变,构建改进单目标人工鱼群算法(Modified Single Objective Artificial Fish Swarm Algorithm,MSOAFSA)。修正的V和S表达式如下:

式中,V0、Vmin为视野的初始值与最小值,V∈[0.01,10][17];S0、Smin为步长的初始值与最小值,S∈[0.002,2][17];i为当前迭代次数;imax为最大迭代次数,一般imax≥100[17]。
所以,基于BSOAFSA 和式(6),本文重构的MSOAFSA 流程如下:
Step 1:MSOAFSA 的适应度函数f(X)设为minf(X),相关参数初始化设置,包括人工鱼规模N、人工鱼维度D、V0与Vmin、S0与Smin、当前迭代次数i、最大迭代次数imax、拥挤度因子δ、尝试次数T、变量变量Variable;
Step 2:初始化人工鱼群的状态Xn;
Step 3:对每个人工鱼进行适应度函数值fitness[n](n=1,2,…,N)的计算,并找出最优人工鱼Xb;
Step 4:基于式(6),进行V与S自适应更新;
Step 5:将人工鱼Xn进行聚群行为,找出视野范围内的中心位置。若拥挤度D[Xc]<D[Xn],且fitness[Xc]<fitness[Xn],则输出聚群行为后的人工鱼Xs,并向前移动一个步长。反之,则进行觅食与随机行为,继续搜索聚群行为下的最优状态Xs;
Step 6:将人工鱼Xn进行追尾行为,找出在视野范围内最小适应度个体Xm。若拥挤度D[Xm]<D[Xn],且fitness[Xm]<fitness[Xn],则输出追尾行为后的人工鱼Xf,并向前移动一个步长。反之,则进行觅食与随机行为,继续搜索追尾行为下的最优状态Xf;
Step 7:对比聚群与追尾行为中的最优状态Xs与Xf,若fitness[Xf]<fitness[Xs],则输出Xf替换Xb。反之,则输出Xs替换Xb;
Step 8:若i<imax,则返回Step 3,继续迭代运算。否则运算结束,输出最优适应度值fitness*。
该MSOAFSA 可用MATLAB 软件进行编程,命名与保存为一个MSOAFSA.m 文件。选取文献[18]中的Rastrigin 函数,数学式如下:

式中,xi∈[-5.12,5.12],f(x)是多峰函数,理论极小值点在(x1,x2,…,xD)=(0,0,…,0)处取0。
将该MSOAFSA 和BSOAFSA[17]分别作用于Rastrigin 函数,进行minf(x)优化结果对比。这里,MSOAFSA 与BSOAFSA 相关参数设置为:V∈[0.01,10]、S∈[0.002,2]、imax=100、N=200、δ=15、T=100、D=10、Variable∈[-10,10]。BSOAFSA 中的V=5、S=2。两种算法分别运行10 次,相应的统计结果和minf(x)在MSOAFSA 和BSOAFSA 作用下的变化进程,分别如表1 和图3所示。

图3 基于MSOAFSA 和BSOAFSA 的Rastrigin 函数适应度值进化过程Fig.3 Evolution process of Rastrigin function fitness value based on MSOAFSA and BSOAFSA
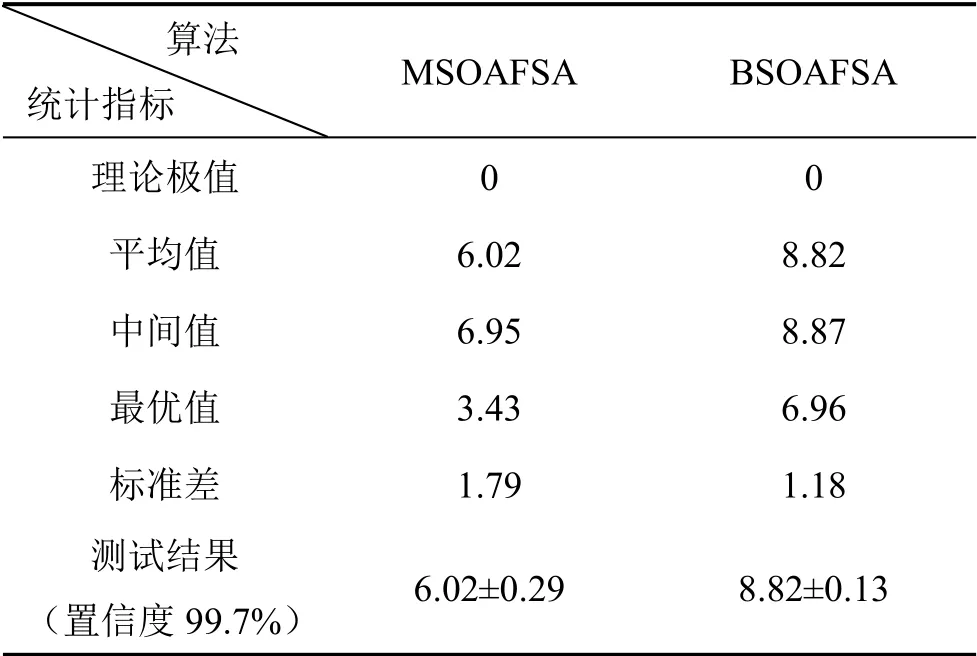
表1 MSOAFSA 和BSOAFSA 对Rastrigin 函数优化结果Table 1 Optimization results of Rastrigin function by MSOAFSA and BSOAFSA
分析表1 和图3,相比BSOAFSA,本文重构的MSOAFSA 可以使Rastrigin 函数适应度值更接近理论值。BSOAFSA 虽在早期收敛速度较快,但在后期明显差于MSOAFSA,这也说明了对人工鱼视野和步长进行动态调整的必要性,也表明了MSOAFSA 是可行的。
(2)改进多目标人工鱼群算法
为了使用人工鱼群算法求解多个目标问题的Pareto 最优解,本节将基于多目标的混沌局部搜索策 略[19](Multi-objective Chaotic Local Search Strategy,MOCLSS)引入MSOAFSA,形成改进多目标人工鱼群算法(Modified Multi-objective Artificial Fish Swarm Algorithm,MMOAFSA),相应的运算流程如下:
Step 1:初始化设置:对V0、S0、Vmin、Smin、imax、N、δ、T和混沌搜索最大迭代次数Gmax、映射参数r、变量Variable 进行赋值;
Step 2:计算每个人工鱼个体的目标函数J(X),并进行快速非支配排序(FNDS),找出非支配解(NDS),存放在外部档案集(Rep)中;
Step 3:开始优化,由式(6)自适应更新V、S,对其执行的行为进行选择,包括:觅食Pray、聚群Swarm、追尾Follow 和随机行为Move,并将其通过FNDS,找出NDS,与上次生成的Rep 进行合并,生成(Rep)New;
Step 4:对合并后的(Rep)New,再次进行FNDS,并对其进行维护:若Rep>N,则进行Dis 计算,并按照降序排列选取前100个个体,完成Rep的更新;
Step 5:通过基于多目标的混沌局部搜索策略,再次更新Rep;
Step 6:若i≥imax,则停止算法,输出最终Rep作为Pareto 最优解x*。否则,返回Step 3 迭代继续。
同样的,上述MMOAFSA也可用MATLAB软件进行编程,命名与保存为一个MMOAFSA.m文件。选取文献[20]中的ZDT1、ZDT3和DTLZ2测试函数,分别将该MMOAFSA 和文献[15]中的MOAFSA(也编程、命名与保存为一个MOAFSA.m文件)作用于它们。这里,MMOAFSA和MOAFSA相关参数设置为:V∈[0.01,5]、S∈[0.002,1.2]、
imax=200、N=200、δ=15、T=100、Gmax=10、r=4、
Variable∈[0,1],MOAFSA中的V=2、S=0.5。
假设网络中每个节点的测量噪声{vk,i}和输入矢量{uk,i}是相互独立的,则可以得到且有以下给出了加权最大似然估计问题(等价于加权最小二乘估计问题)的解:
此外,选择5 个性能指标[20]:世代距离(Generational Distance,GD )、反 世 代 距 离(Inverted Generational Distance,IGD)、超体积(Hypervolume,HV)、均匀性(Spacing,SP)和多样性(Diversity,DIV)来定量分析两种算法的优化性能。其中,GD表示非支配解到Pareto最优解的平均距离、而IGD为GD的逆向映射,其值越小,表明优化解越接近于参考解且算法收敛性越好;HV值表示非支配解集与参照点围成的目标空间中区域体积,其值越大说明算法的综合性能更强;SP为每个解到其他解的最小距离标准差,其值越小,说明解集越均匀;DIV值反应解的多样性,值越小,解的多样性越高。
MOAFSA与MMOAFSA分别运行10次,图4和表2分别为这两种算法对上述3个测试函数的优化过程和基于5个性能评价指标的结果统计,括号内代表MOAFSA[15]的优化结果。
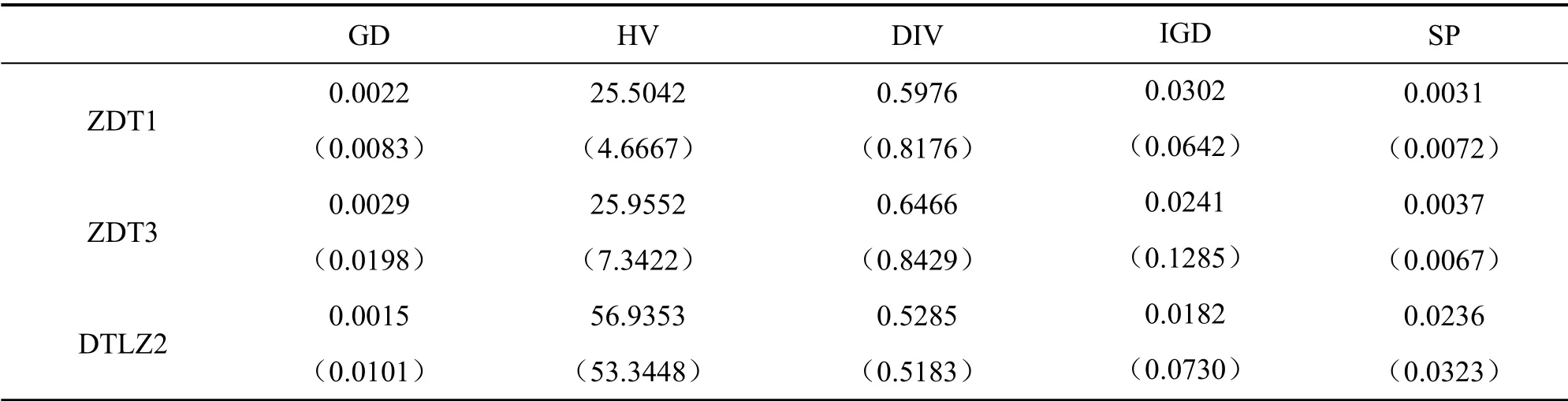
表2 MMOAFSA 与MOAFSA[15]性能指标结果Table 2 Performance index results solved by MMOAFSA and MOAFSA
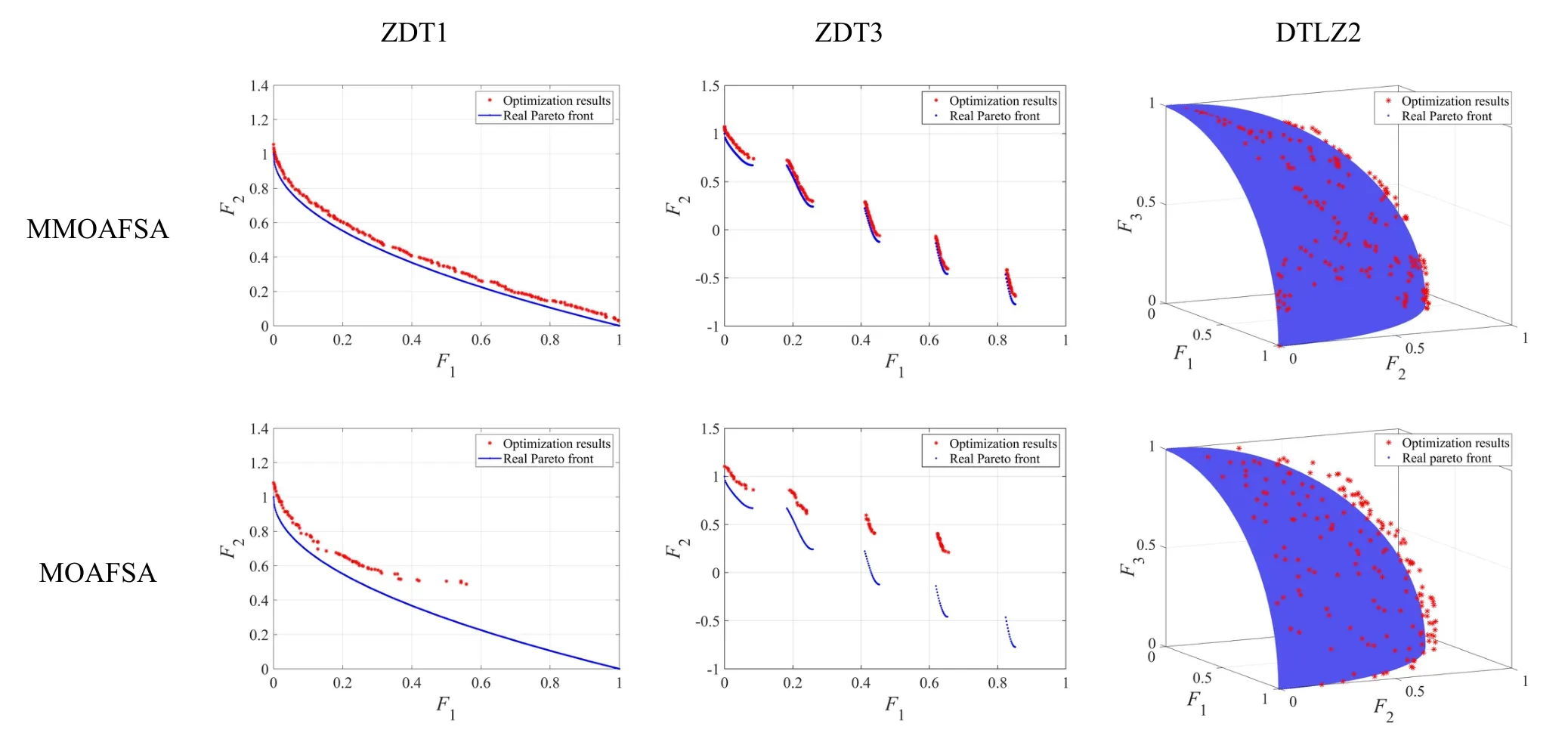
图4 MOAFSA[15]和MMOAFSA 对ZDT1、ZDT3、DTLZ2 测试函数的优化过程Fig.4 Optimizing processes solved by MOAFSA and MMOAFSA for the test functions of ZDT1,ZDT3 and DTLZ2
由图4可知,当MOAFSA与MMOAFSA对两目标和三目标函数的问题进行优化时,最后均可收敛到相应的真实Pareto前沿区域。但后者求解变化与真实Pareto前沿变化之间的偏离度更小,且所求解的非支配解更贴近Pareto前沿,收敛性更好。
分析表2,可知MMOAFSA求解的HV平均值大于MOAFSA,表明其综合性能优于MOAFSA。对于其他4项指标平均值,MMOAFSA的解均小于MOAFSA,表明MMOAFSA得到的非劣解相比MOAFSA更接近Pareto前沿面,算法的收敛性及解的多样性均优于MOAFSA。所以,该MMOAFSA的改进思路是可行、有效的,为后面PID控制器参数整定算法的设计,奠定了坚实的基础。
2.3 基于MMOAFSA 的PID 控制器参数整定算法
本节选择ITAE、tc和Ess[8]作为MMOAFSA的三个目标函数:

Step 1:根据Z−N 整定法的PID 控制器参数整定公式,计算出PID 控制器参数的初始值y0=[KP0,KI0,KD0],置入基于MALAB/Simlink 工具组态中的PID 控制器,且设定变量KP、KI和KD的上、下限;
Step 3:输入单位闭环负反馈PID 控制系统的反馈信号e(t),基于minJ(X),计算每个鱼群个体的适应度值[J1,J2,J3];
Step 4:增大i,由式(6)自适应更新人工鱼的V和S,并对其进行行为选择。同时通过FNDS,不断输出每一组NDS,即yi;
Step 5:对NDS,进行MOCLSS,并更新输出搜索结果NDS。同时输出对应的闭环负反馈PID控制系统动态响应;
Step 7:当i≥imax,停止运算。输出PID 控制器参数最优值y*=[KP*,KI*,KD*],ITAE、tc和Ess的Pareto 最优解以及相应的闭环负反馈PID 控制系统动态响应。否则,返回Step 3。
需要说明的是,可用MATLAB软件,将上述的PID控制器参数整定流程进行编程,保存为一个独立程序,命名为MMOAFSA.m。该MMOAFSA.m是与组态的闭环PID负反馈控制系统同步运行的。
选用文献[11]中的二阶传递函数,如式(9)所示,作为被控对象设计一个单位闭环PID 负反馈控制系统作用于它。

首先借助MATLAB/Simlink工具,进行上述的单位闭环PID负反馈控制系统的组态。其次,分别用MOAFSA[15]、MMOAFSA和Z-N法来整定该PID控制器的3个参数。其中MOAFSA[15]也将minJ(X)作为其目标函数,它与MMOAFSA相关的参数设置为:N=30、imax=30、V∈[0.01,2],S∈[0.002,1]、δ=15、T=100、Gmax=10、r=4、KP∈[2,5]、KI∈[0.1,0.5]、KD∈[0.2,0.5]。最后,Z-N法离线计算出PID控制器参数值。再依次同步运行MOAFSA.m和单位闭环PID 负反馈控制系统组态模型,MMOAFSA.m和单位闭环PID负反馈控制系统组态模型。可获取该PID控制器的3个参数整定结果,如表3所示。
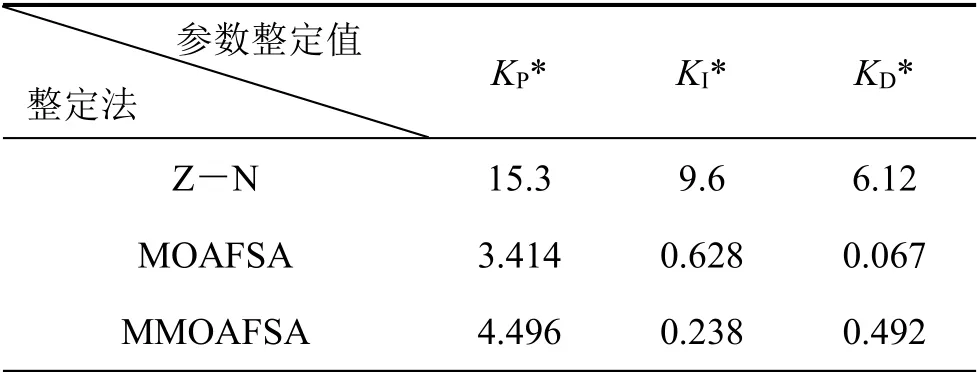
表3 PID 控制器参数整定的结果Table 3 Results of tuning three parameters for PID controller
相应的闭环负反馈PID控制系统动态响应曲线,如图5所示。

图5 不同PID 控制器参数值的单位闭环负反馈控制系统动态响应Fig.5 Dynamic responses of a unit closed-loop negative feedback PID control system with different values of controller’s parameters
分析图5 可知,基于MMOAFSA 整定的KP*,KI*,KD*,其闭环PID 控制系统的性能指标,如最大偏差、超调量和误差等,均好于由Z-N 法和MOAFSA 参数整定作用下的闭环PID 控制系统的性能指标,表明MMOAFSA 对PID 控制器的参数整定是可行的。
3 数值仿真
3.1 双参数前馈解耦PID 控制系统中的组成环节的输入/输出特性
(1)蒸发器的输入/输出特性
蒸发器这一被控对象为一阶惯性、时滞的环节,其输入/输出特性为:通过电子膨胀阀后的制冷剂流量qr/蒸发温度Te,传递函数如下[3]。

(2)压缩机的输入/输出特性
压缩机同样为一个一阶惯性、时滞的环节,其输入/输出特性为:变频电机输出的电机转速n/过热度Dsh,传递函数如式(11)所示[3]。

(3)电子膨胀阀的输入/输出特性
具有线性流量特性的电子膨胀阀,可连续改变其开度OEEV来调节制冷剂流量qr。因此它的传递函数如下[21]:

(4)变频器的输入/输出特性
在工程实践中,变频器传递函数可简化以设定为一个比例环节[22]。

式中,f为变频器输出的供电频率,Hz;U为输入的电压控制信号,V。
(5)变频电机的输入/输出特性
通过文献[22],可知变频电动机为一个一阶惯性环节,其输入/输出特性为:变频器输出频率f∕转速n,传递函数如下所示:

式中,KM为稳态转速与供电频率的比值;TM为电机拖动系统的时间常数,取值为电机启动时间的四分之一。
(6)蒸发温度、过热度PID 控制器的输入/输出特性
在蒸发温度与过热度两个控制回路中均选择简单、形式固定、操作便捷的PID 控制器。相应的传递函数表示如下[10]:

式中,KP、KI、KD为控制器的比例增益、积分增益、微分增益。
(7)蒸发温度、过热度测量变送器的输入/输出特性
测量变送器在过程控制中是必不可少的组成部分,蒸发温度和过热度测量变送器分别作用于这两个控制回路中的反馈通道上。蒸发温度和过热度测量测量变送器均视为比例环节[5],对应的传递函数分别为H1(s)=1,H2(s)=1。
3.2 双参数前馈解耦PID 控制系统的组态与仿真
考虑到蒸发器与压缩机的被控对象具有时滞特性,引入Smith 预估器[6],来消除时延带来的影响,提升系统的控制品质,同时,设置前馈补偿解耦器F12(s)和F21(s),实现对VCRU 双参数的解耦控制。所以,基于MMOAFSA 的蒸发温度与过热度前馈补偿解耦PID 控制系统,如图6所示。
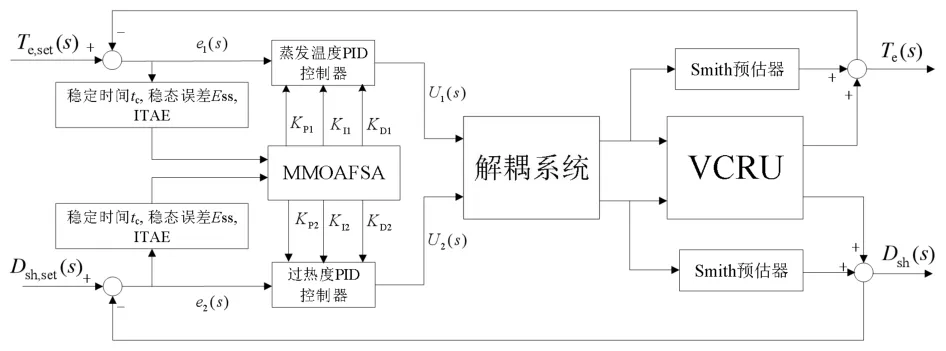
图6 基于MMOAFSA 的蒸发温度与过热度前馈解耦PID 控制系统方框图Fig.6 Block diagram of two-parameter feedforward decoupling PID control system based on MMOAFSA
基于min(ITAE,tc,Ess),通过MMOAFSA对两个控制回路中的PID控制器6个参数(KP1,KI1,KD1,KP2,KI2,KD2)进行寻优整定,获取PID控制器参数最优解及三目标函数值,使得Te,set≈Te,Dsh,set≈Dsh,满足制冷工艺的要求。
基于图6 和Simulink 工具,构建出该双参数前馈解耦PID 控制系统的Simulink 模型,如图7所示。夏季制冷工况下的空调冷冻水进/出口温度为12℃∕7℃,而蒸发温度一般较冷冻水出口温度低2℃~4℃,且过热度范围为5℃~10℃[1]。因此,设置蒸发温度初始、终止值分别为3℃、5℃,即Te,0=3℃、Te,set=5℃;过热度初始、终止值分别为8℃、6℃,即Dsh,0=8℃、Dsh,set=6℃。

图7 基于MMOAFSA 的双参数前馈补偿解耦PID 控制系统Simulink 模型Fig.7 Simulink model of two-parameter feedforward decoupling PID control system based on MMOAFSA
因此,在MATLAB 中的Command Window 界面和Simulink 环境,MMOAFSA.m 参数设置同上述2.3 中一样,非支配解的规模设定为3,变量范围调整为:KP1,KP2∈[0.7,1]、KI1,KI2∈[0.05,0.08]、KD1,KD2∈[0.02,0.06]。同步运行MMOAFSA.m 和图7所示的Simulink 模型,该MMOAFSA 得到的蒸发温度、过热度PID 控制器参数及其对应的ITAE、tc和Ess的3 组Pareto 最优解,列于表4。
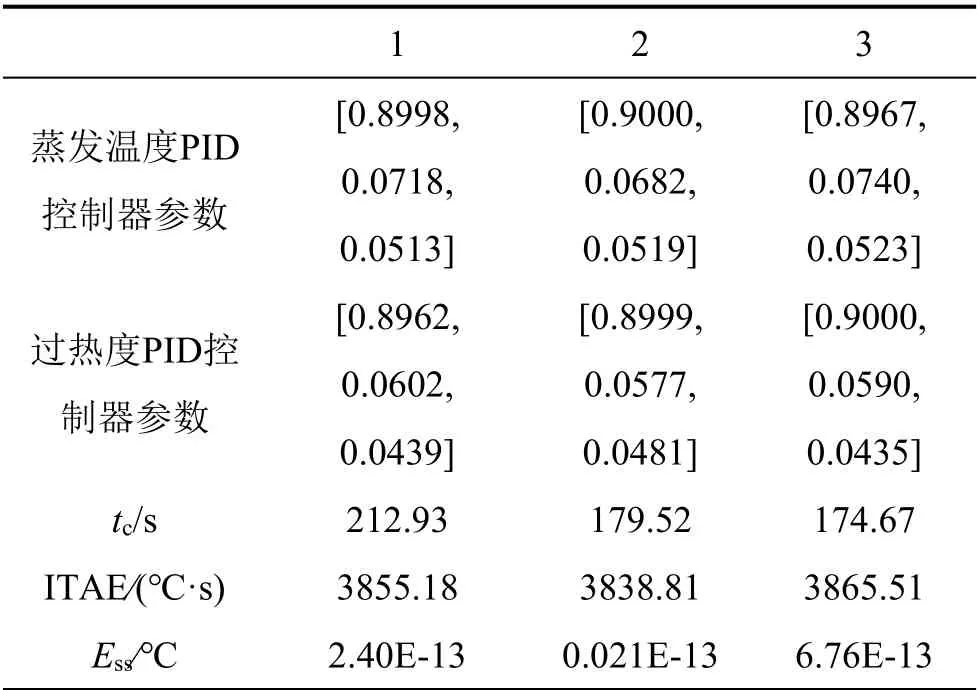
表4 蒸发温度、过热度PID 控制器参数及其三目标函数的Pareto 解Table 4 Pareto solutions of parameters of PID controllers for evaporation temperature and degree of superheating and three objective functions
从表4可看出三组Pareto解及其对应的三个目标函数值存在互相冲突的地方,每组解都表现出不同的特征,例如,第3组的tc最小,但ITAE与Ess却大于另外两组解。由此看出,在多目标优化整定控制器参数过程中可以获得侧重点不同的控制效果,以供不同的控制需求使用。
相应的ITAE、tc和Ess的优化过程,如图8所示。
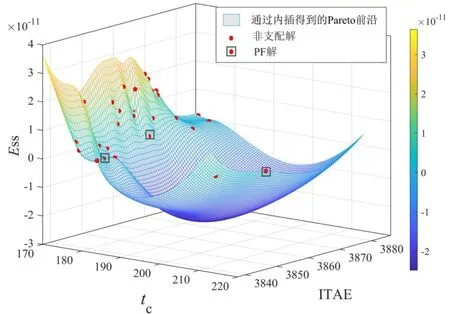
图8 ITAE,tc,Ess的寻优过程Fig.8 Optimization process for ITAE,tc and Ess
由图8可清楚地看出不同Pareto解所对应的三个目标函数值之间的关系,在曲面上不同的位置都反应出不同的控制特征。
同时,空调夏季工况下,基于蒸发温度、过热度PID控制器参数的3组Pareto最优解,可得到蒸发温度、过热度的动态响应过程,分别如图9和10所示。

图9 三组Pareto 最优解下的蒸发温度动态响应Fig.9 Dynamic responses of evaporation temperature under three Pareto optimal solutions
分析图9和10可知,基于MMOAFSA得到的两个PID控制器的三组解均可使蒸发温度与过热度达到较好的控制效果。但从局部放大部分可看出,每组解在其调节时间、超调量都表现出不同的差异,且与表4中三目标函数值所反应出的特征相对应。
3.3 与其他控制方式的比对
此外,选择Z−N 整定法和MOAFSA,也对相同的蒸发温度与过热度PID 控制系统中的两个控制器参数进行整定和输出Te和Dsh的动态响应,且与MOAFSA 进行对比分析,如图11 和12所示。
分析图10 和图11,可知采用MMOAFSA 的PID 控制器参数整定方式,蒸发温度与过热度响应曲线的性能均优于其他两种方式。Z−N 整定法,虽然调节时间缩短,但表现出了较大的超调量和震荡频率。相比MOAFSA,MMOAFSA 使得Te和Dsh的调节时间和超调量均有一定的减小,提升了控制品质。

图10 三组Pareto 最优解下的过热度动态响应Fig.10 Dynamic responses of degree of superheating under three Pareto optimal solutions

图11 三种PID 控制器参数整定方式下蒸发温度响应曲线Fig.11 Dynamic responses of evaporation temperature under three modes of tuning parameters of PID controller
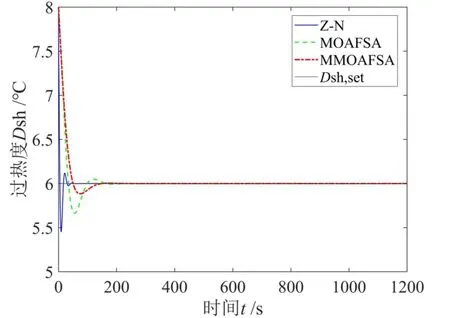
图12 三种PID 控制器参数整定方式下过热度响应曲线Fig.12 Dynamic responses of degree of superheating under three modes of tuning parameters of PID controller
4 结论
针对VCRU中的蒸发温度与过热度被控对象,本文提出了一种基于MMOAFSA的双参数前馈补偿解耦PID控制策略。首先,通过对人工鱼的视野和步长同时进行非线性改变,重构了MSOAFSA,且基于Rastrigin函数测试,验证了该算法改进的可行性。其次,将基于多目标优化的混沌局部搜索策略引入MSOAFSA,形成MMOAFSA。通过ZDT1、ZDT3和DTLZ2三个测试函数和GD、IGD、DIV、SP、HV五个评价指标,可看出MMOAFSA在收敛性、分布性、多样性等均优于MOAFSA。进而将min(ITAE,tc,Ess)作为MMOAFSA的目标函数,形成PID控制器参数的整定算法。同时,构建前馈解耦补偿器的传递函数矩阵,来消除蒸发温度Te和过热度Dshh这两个控制回路之间的耦合效应。最后,构建Te和Dsh前馈解耦PID控制系统,对于Te和Dsh回路中两个PID控制器中的6个参数,应用MMOAFSA进行寻优整定,获取了其最佳值及ITAE,tc,Ess的PF解。满足Te=Te,set和Dsh=Dsh,set的制冷工艺目的,且调节时间、超调量和震荡频率都有着明显的改善,控制质量显著提升。