低噪声拖曳试验平台数值计算分析
2022-07-28陈小星朱张立
田 雷,陈小星,朱张立
(杭州应用声学研究所,杭州 310012)
0 引言
拖曳线列阵声纳作为水下远程目标警戒和海洋环境勘测的最主要声纳之一,受到了广泛关注。其探测性能提高的关键在于信噪比。由于拖曳线列阵声纳的声基阵(拖线阵)在工作时由拖缆拖曳于平台后方数百米处,因此可以远离平台噪声干扰,其背景噪声的主要组成部分是拖曳时产生的流噪声。因此,研究拖线阵的流噪声特性、提出针对性的降噪措施是提高拖曳线列阵声纳性能的重要课题,而目前拖线阵流噪声的理论计算准确性还达不到指导工程实践的要求,因此通过试验对拖线阵流噪声特性进行测量分析是一种有效的研究方法。拖线阵流噪声试验系统如图1 所示。试验系统由趸船、拖曳绞车、拖绳、拖曳试验平台(安装接收阵流噪声信息存储分析设备)、拖缆段、接收阵、尾绳以及浮标组成。试验时,关闭趸船上的水泵、空调,行车等所有噪声影响大的设备,并对试验水域内的环境噪声进行监测。用机动工作艇牵引尾绳将接收阵、试验平台等拖至距离趸船约1 000 m 处开阔水域。然后机动船停船,关闭发动机并释放尾绳和浮标,在趸船上启动拖曳绞车,并设定稳定拖曳速度,当拖曳速度达到预设值并稳定后开始流噪声数据存储。存储完成后,由机动工作艇再次将接收阵和试验平台拖向远处,开始新一轮试验。

图1 拖线阵流噪声测试系统设备布置
在该试验系统中,接收阵受到的干扰主要来自于拖曳试验平台产生的噪声和尾流,因此,必须降低拖曳试验平台的噪声和尾流影响。本文阐述了一种三体船形式的低噪声拖曳试验平台的船型设计,水动力特性分析和噪声场分析,验证其尾流和噪声特性符合拖线阵流噪声试验系统的要求。
1 船型参数
经方案论证,本拖曳试验平台采用三体船形式,主船体由3个片体组成,3个片体均呈细长型,能有效减小平台在拖曳试验过程中的兴波阻力,三体船各片体的水线面形状均呈梭形,可有效减小片体尾部的兴波,改善船后部的噪声特征。三体船的主体型线如图2 所示,主要船型参数如表1所示。
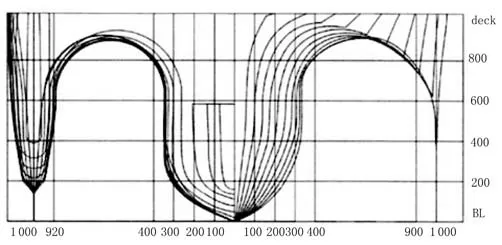
图2 主体横剖型线图

表1 三体船主尺度参数
2 水动力计算分析
2.1 模型简化与网格划分
本项目中所设计的三体船模型主要包括主体部分和上层建筑以及内部设施等,如图3 所示。在进行水动力数值计算时,影响水动力性能的主要部分为三体船的水下部分以及水线上方一部分船体,故在具体的计算过程中将模型进行简化处理,删掉了上层建筑及一些对水动力性能影响较小的细节,并将三体船模型导入到数值计算软件中,如图4所示。

图3 三体船主要布置(侧前方视角)

图4 三体船模型(简化后)
通常来说,CFD 流场仿真计算的收敛和准确度很大程度上取决于网格划分情况,尤其是当计算对象具有复杂的形状时更是如此,因此网格划分时要结合模型特点和计算需求进行综合优化。本文充分考虑了三体船所处的粘性流场的特点,加密了附面层、边界层、自由液面以及船身首尾等部位的网格;考虑水深方向波动的极速衰减情况,对开尔文波形之外的网格和垂向网格采取了相对而言比较稀疏的划分方式。
图5(a)中是三体船中体首部位置附面层、湍流边界层及附近流场的网格,靠近三体船中体外表面的网格采用棱柱层划分方式,向外衔接到外层的切割体网格(Trimmed Mesh),其间网格尺寸的过渡应尽量平缓。该形式的网格组合可以在保证对边界层内的流动进行准确模拟的前提下,尽可能减少对计算资源的消耗;图5(a)的网格划分用于描绘三体船航行时船身周围的兴波情况,为了减少计算过程产生的波衍射现象的影响,网格的划分采用了由密集逐渐转为稀疏,平缓过渡的形式。如图6 所示,为准确呈现船首和船尾附近流场的波高,首尾部分的网格进行了加密处理。每个计算速度直接决定了网格加密的部位,因此布置了20 个网格点来对流场中的波高峰值进行捕获。
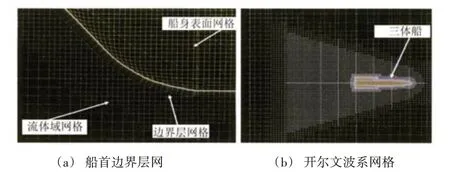
图5 船体网格划分

图6 船身及尾部流场加密
CFD 仿真计算所使用的计算域如图7 所示,为了减少对计算资源的消耗,降低成本,计算域进行了如下设置:首先,根据三体船的对称特性,计算域设置为对称边界的形式,对三体船的半宽进行计算,以减少运算量,提高计算速度;其次,前速度入口边界到船首的距离为三体船中体水线长度LWL的1.5 倍,压力出口边界到船尾的距离为LWL的3.5 倍,侧面宽度和底部深度均为LWL的1.5倍。消波波长设置为5 m以减少波反射的影响。
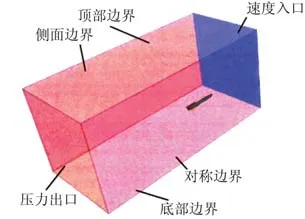
图7 计算域
2.2 计算参数
本文在计算中应用了有限控制体模型:控制体的形状不限,但其体积大小是有限的,且在空间上是固定的。其连续方程为:

该方程的微分形式则用来表征有限控制体流动模型的流体元:

本文采用有限体积法对偏微分方程进行离散化处理,该方法以有限差分法为基础。其大致思路可以概括如下:对流动模型进行网格化处理,划分为若干相互独立的控制体积单元;在每一个独立的控制体积单元内,进行微分方程的积分,形成与各控制体积单元一一对应的离散方程组。建立控制体积单元的离散方程组时,要点是通过对节点物理参数进行插值处理的形式解算得到控制体积界面上的物理参数和对应的导数,进行插值的方式也可以叫做离散格式。本次计算的离散格式选取如下:对流项采取二阶迎风格式进行离散,耗散项的离散格式则选取为二阶中心差分格式。
另外,为削弱预设的初始条件对均匀流动的不稳定性影响,本次数值计算选定了VOF 模型,并将亚松弛因子设定为线性的;在计算所涉及的全部情形中,边界层的厚度保持恒定,边界层的层数也未发生变化,计算结果显示,船体外壁面附近的Y+值峰值达到接近4.5,这一结果验证了近壁面的有效性;计算过程中,三体船模型的横荡、纵荡、艏摇、横摇纵摇和垂荡6 个自由度中,放开了后两者,在此模式下,模型的运行时间为40 s。
本次数值计算中运用的计算模型以及部分其他相关参数如表2 所示,计算过程中的时间步长选定以及网格划分尺寸等如表3所示。
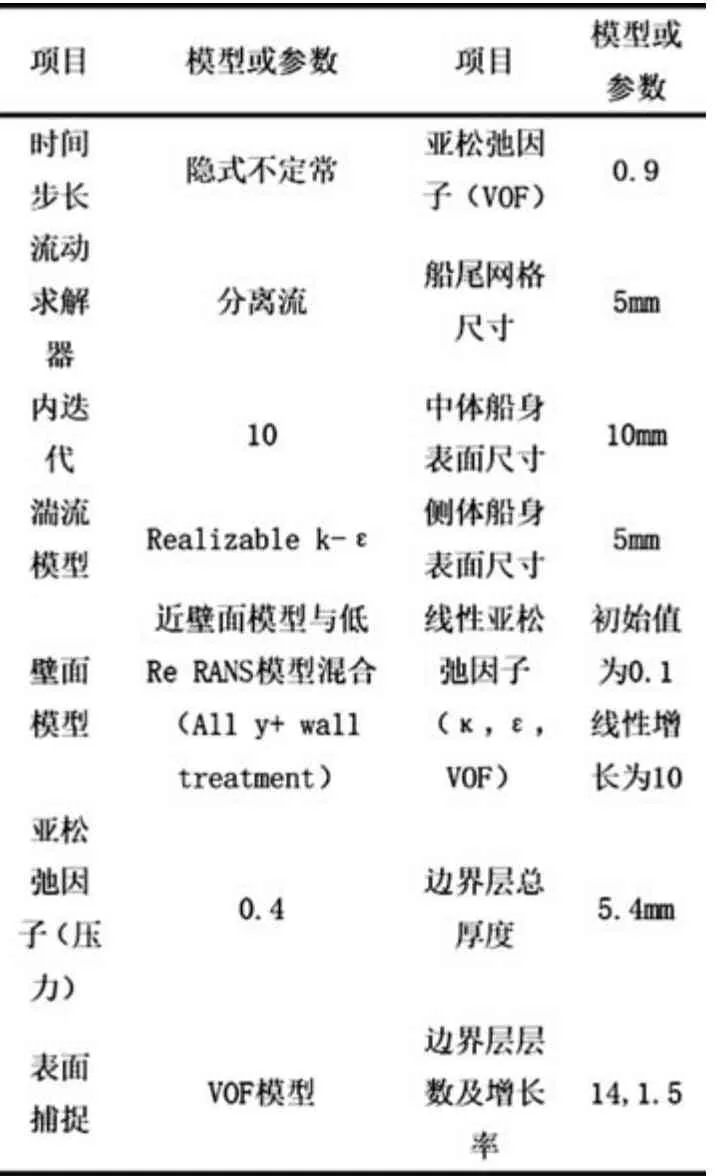
表2 计算模型及相关参数

表3 时间步长及网格参数
2.3 计算结果分析
按照上述的网格划分方案和相关计算参数进行数值计算,可得到三体船在相应航速下的流场细节,通过VOF 波形计算可准确捕捉到三体船在航行过程中船身周围以及后方的兴波情况,数值模拟结果如图8 所示。由计算结果可看出,该三体船在低速(vs=3 m/s)时,与常规三体船相似,中体与侧体之间呈现出强烈的兴波干扰,但此时船体兴波波高并不大,波高最大值也仅l5.7 cm。当航速较高时(vs= 6 m/s)时,该三体船的中体与片体之间兴波干扰减弱,船体兴波即主要以散波为主,且波幅较小,横波很小且很快就消散了。当航速进一步提高(vs=9 m/s)时,该三体船的这种中、侧体间的兴波干扰作用更小,船体兴波主要以散波为主,船体后方大部分范围内的波高在l5 cm以内。当达到最高航速(vs=12.5 m/s)时,该三体船的船体兴波中与散波相比,横波基本可以忽略,尾流中大部分的波高在28 cm 以内,该船型呈现出的尾波特点也正是其水线面形状为梭形的船型特征所决定的。
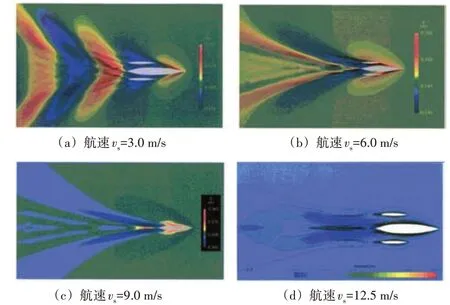
图8 船身周围波形图
3 噪声仿真计算分析
3.1 仿真计算方法
基于声学有限元/无限元理论的ACTRAN 软件是一款用于解决振动噪声、气动噪声、流噪声等问题的软件。它通过对声源结构和辐射声场建立离散化模型,运用Lighthill 声类比方法求解湍流流动区的流噪声,通过采用声学有限元的方法求解频域上的波动方程得到近场声压分布,然后采用无限元方法对远场进行离散化处理,求取指定位置的辐射噪声。
解决声学模拟计算与CFD 流场模拟计算的耦合问题,是将ACTRAN 软件作为流噪声模拟计算工具的基本前提条件。其基本思路是:将声源面附近的一小块流动区域选取成为发声体,用Lighthill 声类比法从CFD 模拟计算得到的计算对象流场中提取出噪声源,进而模拟出计算对象不同航速下的辐射噪声场分布。对于三体船湍流噪声的计算而言,具体的实施程序如下所述:
(1)建立计三体船的计算模型,并进行网格划分;
(2)运用CFD 计算软件(Fluent),通过雷诺平均法、大涡模拟方法或直接模拟方法对模型进行非稳态模拟计算,从而得到详细的非定常流场分布信息;
(3)将通过CFD 计算得到的数据文件导入ACTRAN软件的数据接口,并运用Lighthill 方程,从数据文件中的模型非定常流场湍流分布信息里提取出声源的时域分布特征;
(4)对声源进行DFT转换,获取相应的频域分布信息;
(5)将声源的频域分布信息以积分法插入到模型表面和声传播区的声学网格中;
(5)使用ACTRAN 软件对声场的声压分布和噪声监测点的声学参数进行计算;
(6)运行ACTRAN 软件后处理功能模块,完善声场分布信息,实现计算结果的可视化呈现。
在ACTRAN 计算中,声学网格包含声源面、声源区及声传播区。声源面即是发声面,如本节即将计算的三体船外壁面;声源区就是三体船表面周围的一块湍流流动区域,为表达流体的有限元;声传播区是包围声源区的一块流体有限元区域。因此,声传播区的外边界面就等同于声学计算区域的外边界面,这一边界面也被设置为无限元边界。声源面在粘性流体中的运动形成湍流,湍流区边界层分离和涡激振动产生声波,即形成声源区;声波经由声传播区向远处扩散,到达无限元边界后,穿透边界层继续向远处扩散,无限元边界层对声波的折射和反射为0,在无限元边界之外,假定流场是均匀的,声波可以到达无限远处。无限元的使用不仅让单元数量极大地减少了,而且能够实现不限数量、不限距离的噪声监测点自由布置,以根据需求获得任意位置的详细声场信息,却只需要付出消耗极少量计算资源的代价。
按照图9 所示湍流噪声计算流程,需先计算得到模型的非定常流场准确信息。按照模型建立、网格划分、流场计算以及结果处理的步骤开展。

图9 湍流噪声计算流程
3.2 几何模型建立
此次计算主要关注三体船后方的噪声,为减少网格数量,提高计算效率,忽略上层建筑等细节信息。

图10 船体几何模型
3.3 计算域的建立
3.3.1 流体计算域建立
为了模拟三体船的航行状态,计算域取为一个适当大小的长方体域,域的大小要尽量消除壁面效应影响,但又不能过大而使网格数目激增。本文计算域尺寸设置如下:入口处到船首的距离为三体船中体水线长度LWL的1 倍,出口处到船尾的距离为LWL的2 倍,左右两侧壁面到船舷的距离为LWL的1倍,底部边界到船底的距离为LWL的1 倍,计算中只考虑模型水下部分,因此在建模计算过程中未考虑自由液面的影响,具体几何模型如图11所示。

图11 流体计算域的选取
3.3.2 噪声计算域建立
噪声计算在船舶水动力性能计算基础上开展,因此还需要建立一个更大的声传播区域,声学计算域如图12所示。

图12 声学计算区域
3.4 网格划分
3.4.1 空化计算网格划分
因该计算模型中忽略上建及自由液面,此次计算中采用全结构化网格。流场计算网格划分如图13~14所示。

图13 流场计算全局网格

图14 船体表面网格
3.4.2 噪声计算网格划分
声学网格包含声源面、声源区及声传播区。声源面即是发声面,即船体的面网格,代表了偶极子声源;声源区就是船体表面周围的一块湍流流动区域,为体网格,代表了四极子声源,且设定的声源区范围应包含于CFD计算中受船体影响到的流场范围之内。
同建立流场计算网格相似,首先利用ICEM 建立船体辐射声场的计算模型,船体表面之外取一层包围船体的长方体域,该域所处的位置应在船体流场的有效影响范围之内。
相较于流场大涡模拟方法计算,网格划分质量对声场计算的影响程度较小,为了在保证计算精确性的基础上减少运算量,声学网格尺寸的最低要求是使用6 个网格节点对每个波长进行捕捉。因此,对于船体声场计算域模型,利用ICEM 进行非结构网格划分即可,网格如图15(a)所示。图15(b)所示为船体面声源网格。
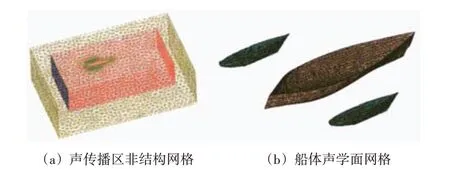
图15 声传播区非结构网格和船体声学面网格
3.5 计算设置
水动力计算采用SIMPLEC 方法进行求解,压力项采用标准方法离散,动量项采用二阶迎风格式离散。船体及远场外壁面均被定义为不可滑移壁面条件;进口设置为velocity-inlet ,出口设置为outf1ow 。噪声计算需在Actran软件中进行面声源载荷和体声源载荷的加载。
3.6 计算结果分析
噪声监测点布置如图16所示,计算船体周围噪声的衰减特性。其中监测点P1、P2、…、P6取在垂向高度为中体基线上,纵向距离三体船中体尾端的距离分别为0.3 m、0.6 m、0.9 m、1.2 m、1.5 m 和1.8 m,表4给出了不同航速下各监测点P处的声压级,通过该表可以看出,在船体基线高度上,航速越高,距离中体尾端越近,噪声越大,最大声压为56.62 dB。为了分析噪声沿X、Y和Z方向的衰减特性,设置各监测点如图16 所示,坐标原点取为中体的纵中剖面、通过中体尾端的横剖面与通过中体基线下1.0 m的水平面之交点,相邻监测点之间隔均为1.0 m。图17所示为航速vs=12 m/s 时,噪声沿X、Y和Z方向的衰减曲线。图中可以看出,噪声沿X、Y和Z方向表现出了不同的噪声衰减特性,其中沿X方向噪声衰减缓慢,衰减幅度最小,这主要是由于船尾流的影响长度较长,沿X方向的流场变化复杂;沿Y方向噪声衰减变化特点是靠近中体纵中剖面的前两个监测点声压差别不大,随着远离中体,声压迅速减小,这主要是由于三体船片体之间的相互干扰导致第二个监测点的声压亦较大;沿Z方向的监测点声压衰减曲线显示,靠近中体基线的前两个监测点声压下降显著,当监测点距离中体基线超过2 m 以后,声压随着与中体基线距离的增大继续下降,但下降速度明显减缓。此外,Y方向的监测点声压大于相同纵向位置处的Z方向的声压,这主要是因为船舶兴波对噪声产生的影响。

图16 噪声监测点的布置

表4 不同航速下各测点的声压值dB

图17 船后噪声沿X、Y和Z方向的衰减特性
4 结束语
本次数值计算分析的结果表明,该三体船形式的拖曳试验平台在工作航速范围内(3~12.5 m/s)具有良好的尾流特性:船体兴波主要以散波为主,船体后方大部分范围内的波高在28 cm 以内。试验平台总体噪声水平良好,在航速为12 m/s 时,后方最大声压为56.62 dB;平台后方噪声的衰减特性如下:噪声沿Z方向衰减最快,Y方向次之,X方向噪声衰减较慢;流噪声试验时,拖线阵位于试验平台后方(即X方向)约40 m,该方向6 m处噪声即衰减至40 dB 以下,远低于试验水域环境噪声(约58 dB)。
为保证该拖曳试验平台可应用于拖线阵流噪声试验并提高拖线阵流噪声测量的准确性,后续还应通过缩比模型试验和实船试验对其尾流和噪声特性开展进一步验证。
