地下矿山激光SLAM技术定量精度评定方法
2022-07-28何玉龙余乐文李翰臣
庞 帆,何玉龙,张 达,陈 凯,余乐文,李翰臣,张 驰
(1.矿冶科技集团有限公司, 北京 100160;2.中国-南非矿产资源开发利用联合研究中心, 北京 102628;3.山东黄金矿业(莱州)有限公司三山岛金矿,山东 莱州 261442)
近年来,随着地下矿山智能化、信息化发展,基于井巷结构三维高精度测绘、采空区安全风险精细化评估、地下矿山无人驾驶及井下无人机应急救援等需求,基于激光雷达的同步定位与地图构建(Simultaneous Localization and Mapping,SLAM)作为核心技术起到至关重要的作用,它能够实现移动载体在无GNSS定位信号下的自我运动估计即定位,包括空间位置和空间姿态,同时增量式地构建周围环境的三维激光点云地图[1]。激光SLAM技术构建的高精度三维激光点云地图能够在采矿生产过程中优化回采设计、提高生产效率和保障安全生产作业。但激光SLAM技术由于内部激光点云连续匹配算法的误差,会导致最终构建的激光点云地图存在一定偏差,因此,必须对激光SLAM技术进行定量的精度评定。
目前国内外相关研究人员针对激光SLAM定量精度评定问题提出了相应的解决方案。ZHANG 等[2]在评测激光SLAM精度时利用GNSS定位结果作为激光SLAM定位结果的真实值,将激光SLAM估计的定位结果视为估计值,利用二者差异计算激光SLAM的定位误差,用相对位置误差率表述每百米的位置偏差量,评测数据集为KITTI数据集[3]。YE 等[4]在无GNSS定位信号的室内环境中评测激光SLAM精度时首先在被测环境中搭建动作捕捉系统,同时在激光雷达传感器上方安置反射标靶球,利用动态捕捉系统识别反射标靶球实时获取激光SLAM的定位结果,将该定位结果视为真实值,将激光SLAM输出的定位结果视为估计值,利用二者差异,计算平移误差和旋转误差。SHAN 等[5]利用搭载激光SLAM技术的移动载体运行一段时间后返回起始位置,实际操作中将移动载体的起始位置与结束位置严格重合,将起始位置处的位姿视为[0,0,0,0,0,0],在激光SLAM输出的位姿序列中查看结束位置处的位姿,与起始位置处的位姿进行比较,计算累计平移误差和累计旋转误差。利用GNSS定位结果作为激光SLAM定位结果的真实值评价激光SLAM定位误差的方案还有很多[6-13],这些做法是目前主流评价激光SLAM精度的方法,更多从激光SLAM技术的定位角度评测精度,没有从激光点云地图角度评测激光SLAM精度。
虽然激光SLAM过程中定位和建图相辅相成,互相促进,定位越准确,建图精度越高,但在地下矿山领域多数用户更加关心最终构建激光点云地图的精度及质量。俞德崎等[14]在评测激光SLAM建图精度时借助钢尺量取自然特征尺寸,视为尺寸真实值,在激光SLAM构建的激光点云地图中提取自然特征尺寸,视为尺寸估计值,利用二者差异计算尺寸误差,自然特征例如配电箱、消防栓等,由于量取自然特征的尺寸过小,无法说明激光点云地图的整体一致性和准确性,另外在地下矿山现场环境中不能保证存在自然特征。檀继猛等[15]利用全站仪和移动式三维激光扫描仪对标靶球进行测量,分别拟合出标靶球中心的真实坐标和估计坐标,计算点位误差,该方法需要借助标靶球工具,在地下矿山现场环境不易布设,计算标靶球中心坐标存在较大的拟合误差。
由于地下矿山环境无GNSS定位信号,因此无法利用GNSS作为定位真值信息评价激光SLAM技术精度;动作捕捉系统在工作时需要良好的光线条件,地下矿山环境光线条件不佳,无法利用动作捕捉系统实时获取反射标靶的位姿,从而不能获取定位真值信息进行精度评定;另外在地下矿山环境中地面凹凸不平,泥泞含水,搭载激光SLAM技术的移动载体运行一段时间后严格返回至起始位置处,该过程操作难度较大,操作不当会影响精度评测效果。
综上所述,为定量评价激光SLAM技术精度,本文从激光SLAM的定位和建图两个方面进行误差分析,提出切实可行的精度验证方案,并结合自研井下无人机载三维激光扫描测量系统及相应的实验环境,完成地下矿山激光SLAM技术的定量精度评测。
1 精度评价方法
由于激光SLAM过程定位精度越高,建图越准确,因此第一个方案侧重评价激光SLAM定位精度,将激光SLAM起始和结束时刻的定位结果与高精度全站仪观测的首尾定位结果进行比较;第二个和第三个方案侧重评价激光点云地图精度,将激光SLAM输出的激光点云数据和高精度全站仪采集的数据进行比较。
1.1 端到端定位误差评价方法
该精度评价方法的基本原理是利用搭载激光SLAM技术的移动载体运行一段时间后返回至起始位置处附近,不必严格返回至起始位置处,仅需在激光雷达上方粘贴反射标靶,在起始时刻和结束时刻分别利用高精度全站仪观测反射标靶的空间坐标,保证两个空间坐标处于同一坐标系下,计算起始和结束时刻的位置差,将该位置差视为位置变化量的真实值。
由于激光SLAM估计的位姿序列均以起始时刻激光雷达坐标系为原点,因此,在激光SLAM定位数据中寻找起始时刻和结束时刻的位姿,计算起始和结束时刻的位置差,将该位置差视为位置变化量的估计值。将位置变化量的真实值和估计值差异视为端到端定位累计漂移量ΔT,见公式(1),该过程的示意图如图1所示,结合激光SLAM过程的定位轨迹长度L,计算端到端定位累计漂移率PT,见公式(2)。

图1 端到端定位误差示意图Fig.1 Schematic diagram of end-to-end positioning error
(1)
(2)
式中:XT、YT、ZT表示起始和结束时刻位置变化量的真实值,由全站仪观测首尾坐标计算;XS、YS、ZS表示起始和结束时刻位置变化量的估计值,由激光SLAM估计首尾位姿坐标计算。
1.2 相对距离误差评价方法
该精度评价方法的基本原理是在激光SLAM技术构建的激光点云地图中提取标靶点空间坐标,标靶点事先在测区范围内均匀布置,根据提取标靶点坐标计算相邻两标靶点间的欧式距离,视该距离为距离估计值De,然后利用高精度全站仪观测各个标靶点,根据观测标靶点坐标计算相应两标靶点间的欧式距离,视该距离为距离真实值Dt,计算距离真实值与估计值的误差,得到相对距离误差ΔD,见公式(3),结合距离真实值Dt得到相对距离偏差率PD,见公式(4),将n对相对距离误差进行统计计算得到相对距离误差的均方根RMSE(ΔD(1:n)),见公式(5),将n对相对距离误差偏差率进行统计计算得到相对距离误差偏差率的均方根RMSE(PD(i:n)),见公式(6)。
ΔD(i)=Dt(i)-De(i)
(3)
(4)
(5)
(6)
在该评价方法中全站仪观测不必借助矿山控制点,只需保证各个标靶点在同一坐标系下即可。该精度评价方式无需将激光点云地图转换坐标系,侧重评价激光点云地图的相对精度。
1.3 绝对点位误差评价方法
该精度评价方法的基本原理是在激光SLAM技术构建的激光点云地图中提取标靶点空间坐标,标靶点事先在测区范围内均匀布置,然后利用高精度全站仪观测各个标靶点。由于激光点云地图中提取的标靶点坐标与全站仪坐标系下观测的标靶点坐标不在同一个坐标系,需要利用3~4对同名标靶点进行坐标变换,将激光点云地图提取的标靶点转换到全站仪坐标系中,坐标变换原理是利用同名标靶点进行迭代最邻近点匹配[16](Iterative Closest Point,ICP),坐标变换可利用点云处理软件实现,例如Cloud Compare或3D Reshaper。将坐标转换后的标靶点坐标视为坐标估计值,将全站仪坐标系下的标靶点坐标视为坐标真实值,计算估计值与真实值的误差,得到绝对点位误差,见公式(7)。
(7)

(8)
在该评价方法中全站仪观测不必借助矿山控制点,只需保证各个标靶点在同一坐标系下即可。该精度评价方式需要将激光点云地图转换到全站仪坐标系下,侧重评价激光点云地图的绝对精度。
2 数据采集
2.1 激光SLAM测量平台
井下无人机载三维激光扫描测量系统是矿冶科技集团有限公司自研的一款飞行式三维激光扫描测量系统(见图2),该系统采用3D激光SLAM技术,可在无GNSS定位信号环境下实时获取被测目标的精细化点云数据。该系统主要由无人机平台、移动扫描主机、平板电脑构成,平板端通过控制及可视化软件远程操控井下无人机载三维激光扫描测量系统。

图2 井下无人机载三维激光扫描测量系统Fig.2 3D Laser scanning measurement system of underground UAV
2.2 测试场景
第一个测试场景为云南省昭通市彝良毛坪铅锌矿河东片区某中段的巷道,长度约为150 m,宽度约为3.8 m,高度约为3.9 m,如图3(a)所示。第二个测试场景为山东省莱州市三山岛金矿西山矿区某中段的采空区,长度约为62 m,宽度约为4.4 m,高度约为4.6 m,如图3(b)所示。第三个测试场景为北京市某模拟巷道,长度约为67 m,宽度约为4.9 m,高度约为4.5 m,如图3(c)所示。

图3 典型矿山测试环境Fig.3 Typical mine test environment
2.3 数据采集流程
井下无人机载三维激光扫描测量系统的数据采集过程,具体流程如下:
首先将移动扫描主机通过快速释放装置连接到无人机平台,连通无人机和移动扫描主机间电源,打开移动扫描主机电源;然后通过平板电脑远程无线连接并启动移动扫描主机,遥控无人机起飞,边飞行边对感兴趣区域进行扫描;接下来遥控无人机器使无人机返回到起始位置处附近;最后通过平板电脑远程关闭移动扫描主机,扫描结束。
高精度全站仪数据采集时事先在测区范围内均匀布置标靶点,标靶点采取黑白棋盘格中心点、现场金属标志牌角点及自制标靶物角点相结合,如图4所示,然后利用准确度等级1级的全站仪观测各个标靶点。

图4 标靶点Fig.4 Target point
3 精度评价
3.1 端到端定位误差
3.1.1 测试场景一
井下无人机载三维激光扫描测量系统获取的激光SLAM定位数据如表1所示,每行包括3个数据,分别为时间戳、空间位置和空间姿态,系统输出的定位结果默认以起始时刻激光雷达位置为坐标原点,空间姿态用四元数表达。

表1 激光SLAM定位数据
将激光SLAM定位数据文件导入SLAM评测工具EVO[17]中,利用EVO定位轨迹分析功能获取起始位置坐标、结束位置坐标、定位轨迹长度、起始位置时间、结束位置时间、累计扫描时间等,如表2所示。

表2 激光SLAM定位数据分析
根据表2中起始、结束位置坐标及全站仪观测首尾坐标差,计算端到端定位累计漂移量ΔT为0.329 m,结合定位轨迹长度L,计算端到端定位累计漂移率PT为0.11%。
3.1.2 测试场景二
与3.1.1处理流程一致,测试场景二的激光SLAM定位数据分析如表3所示。

表3 激光SLAM定位数据分析
根据表3中起始、结束位置坐标及全站仪观测首尾坐标差,计算端到端定位累计漂移量ΔT为0.127 m,结合定位轨迹长度L,计算端到端定位累计漂移率PT为0.12%。
3.1.3 测试场景三
与3.1.1处理流程一致,测试场景三的激光SLAM定位数据分析如表4所示:

表4 激光SLAM定位数据分析
根据表4中起始、结束位置坐标及全站仪观测首尾坐标差,计算端到端定位累计漂移量ΔT为0.134 m,结合定位轨迹长度L,计算端到端定位累计漂移率PT为0.12%。
3.2 相对距离误差
3.2.1 测试场景一
井下无人机载三维激光扫描测量系统构建的巷道激光点云地图如图5所示,局部激光点云地图如图6所示。

图5 巷道整体激光点云地图Fig.5 Overall laser point cloud map of tunnel

图6 巷道局部激光点云地图Fig.6 Local laser point cloud map of tunnel
在测试场景一中均匀布置5个标靶点,利用高精度全站仪观测5个标靶点坐标,视为真实坐标,在激光点云地图中提取相应标靶点坐标,视为估计坐标,真实坐标与估计坐标不在同一坐标系下,如表5所示。

表5 标靶点真实坐标与估计坐标
根据表5计算相邻标靶点间欧式距离的真实值和估计值,计算相对距离误差和相对距离偏差率,误差分析结果如表6所示。

表6 相对距离误差分析
由表6可知,基于本次测试场景,激光SLAM相对距离误差为6.6 cm,相对距离误差偏差率为0.355%。
3.2.2 测试场景二
井下无人机载三维激光扫描测量系统构建的采空区整体激光点云地图如图7所示。

图7 采空区整体激光点云地图Fig.7 Overall laser point cloud map of goaf
在测试场景二中均匀布置8个标靶点,利用高精度全站仪观测8个标靶点坐标,视为真实坐标,在激光点云地图中提取相应的标靶点坐标,视为估计坐标,如表7所示。

表7 标靶点真实坐标与估计坐标
根据表7计算相邻标靶点间欧式距离的真实值和估计值,计算相对距离误差和相对距离偏差率,误差分析结果如表8所示。
由表8可知,基于本次测试场景,激光SLAM相对距离误差为4.2 cm,相对距离误差偏差率为0.403%。
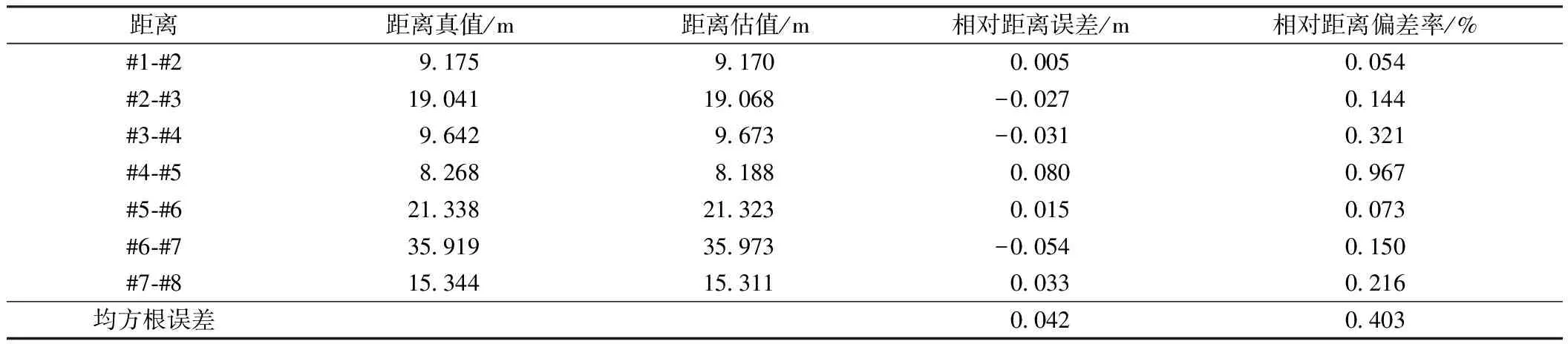
表8 相对距离误差分析
3.2.3 测试场景三
井下无人机载三维激光扫描测量系统构建的模拟巷道整体激光点云地图如图8所示。

图8 模拟巷道整体激光点云地图Fig.8 Laser point cloud map of simulated tunnel
在测试场景三中均匀布置7个标靶点,利用高精度全站仪观测7个标靶点坐标,视为真实值,在激光点云地图中提取相应的标靶点坐标,视为估计值,如表9所示。

表9 标靶点真实坐标与估计坐标
根据表9计算相邻标靶点间欧式距离的真实值和估计值,计算相对距离误差和相对距离偏差率,误差分析结果如表10所示。
由表10可知,基于本次测试场景,激光SLAM相对距离误差为6.9 cm,相对距离误差偏差率为0.562%。

表10 相对距离误差分析
3.3 绝对点位误差
3.3.1 测试场景一
根据1.3评价方法,从场景一激光点云地图中提取#2、#3、#4标靶点空间坐标,根据表5对应的标靶点真实坐标,将激光点云地图转换到全站仪坐标系下,将坐标变换后的标靶点坐标视为估计值,结合标靶点真实坐标,计算每个标靶点的绝对点位误差,误差分析结果如表11所示。

表11 绝对点位误差分析
由表11可知,基于本次测试场景,激光SLAM的绝对点位误差为6.7 cm。
3.3.2 测试场景二
从场景二激光点云地图中提取#1、#3、#6、#8标靶点空间坐标,根据表7对应的标靶点真实坐标,将激光点云地图转换到全站仪坐标系下,将坐标变换后的标靶点坐标视为估计值,结合标靶点真实坐标,计算每个标靶点的绝对点位误差,误差分析结果如表12所示。

表12 绝对点位误差分析
由表12可知,基于本次测试场景,激光SLAM的绝对点位误差为6.9 cm。
3.3.3 测试场景三
从场景三激光点云地图中提取#1、#3、#4、#7标靶点空间坐标,根据表9对应的标靶点真实坐标,将激光点云地图转换到全站仪坐标系下,将坐标变换后的标靶点坐标视为估计值,结合标靶点真实坐标,计算每个标靶点的绝对点位误差,误差分析结果如表13所示。

表13 绝对点位误差分析
由表13可知,基于本次测试场景,激光SLAM的绝对点位误差为7.2 cm。
3.4 误差分析
不同测试场景由于现场周围环境不同导致激光SLAM内部激光点云连续匹配误差不同,因此最终建立的激光点云地图会存在不同程度的偏差,周围环境例如粉尘、水面、动态物体及玻璃等均会影响激光SLAM精度。基于3.2节测试的点云地图相对精度和3.3节测试的点云地图绝对精度,自研激光SLAM测量平台具有厘米级的建图精度。
4 结论
1)针对地下矿山环境无GNSS定位信号、无法利用常规手段评测激光SLAM技术精度的问题,提出三种激光SLAM定量精度验证方案,将端到端定位误差、相对距离误差、绝对点位误差作为精度评测指标,并结合自研激光SLAM测量平台对典型实验场景进行实测,验证精度评测方案的可行性。
2)自研井下无人机载三维激光扫描测量系统具有厘米级的建图精度。
