基于磁流变阻尼器的养护工具车悬架半主动控制分析
2022-07-28黄国荣
■黄国荣
(泉州市公路事业发展中心,泉州 362000)
磁流变液(MRF)是一种将可磁化的微小颗粒与载体介质、添加剂混合制备而成的可控新型智能材料。 在磁场作用下,磁流变液中的磁性颗粒产生磁偶极子, 并导致颗粒之间按照一定的顺序排列。通过施加磁场,磁流变液的粘度以及塑性会产生显著的变化,由具有良好流动性的牛顿流体瞬间转变为Bingham 半固体状态(图1),并且这种状态的改变具有连续性、可控性、可逆性[1]。 磁流变液因其剪切屈服强度大、阻尼调幅范围宽、响应迅速、稳定性好等[2]特点,越来越受到广泛的关注。

图1 磁流变效应现象
自20 世纪末起, 以磁流变液为基础设计制造的可调阻尼器就因耗能小、阻尼力大、响应速度快、机械结构简单等特点引起结构振动控制领域学者的广泛关注, 至今已取得了一定的进展和成果,并逐步开始进入工程实际应用阶段。 如日本东京Nihon-Kagku-Miraikan 建筑首次将磁流变阻尼器用于地震反应控制;我国岳阳洞庭湖大桥拉索振动控制和洪山大桥风雨振动也采用了磁流变阻尼器;重庆大学研制了适合小型车辆的磁流变减振装置,并在轿车上进行了实际路况验证[3];法拉利等跑车选配磁流变阻尼悬架减震系统,大大提高了行驶过程中的稳定性[4]。 但由于磁流变阻尼器的控制技术尚不成熟,在养护工具车辆悬架振动控制中的应用还比较少,目前的研究仍以理论分析和试验为主。 因此, 为改善养护工具车在道路行驶中的友好性,本文就磁流变阻尼器在养护工具车悬架半主动控制中的应用进行分析。
1 磁流变阻尼器模型
构建磁流变阻尼器准确的动力学模型是获取良好控制效果的关键。 磁流变阻尼器的动力学特性受到施加在磁流变液上的磁场强度、激励速度和频率以及温度等因素的影响,其阻尼特性表现出很强的非线性关系,国内外学者在深入研究的基础上提出了一些经典的动力学模型,包括由Kwok 等[5]提出的双曲正切模型、Ma 等[6]提出的扩展的非线性滞环双粘性模型、Wang 等[7]提出的通用Sigmoid 滞环模型、Spencer 等[8]在Bouc-Wen 滞环算子模型的基础上提出的现象模型等。其中,现象模型由Bouc-Wen滞环算子、2 个具有刚度和阻尼性能的元器件通过串并联的方式组合而成,对于描述磁流变阻尼器的性能是比较准确的,并且数字处理方便简单。 为了便于比较不同控制策略的效果,本文数值分析采用Bouc-Wen 现象模型来描述磁流变阻尼器的动力学特性。 如图2 所示,阻尼力F 可以表示为:
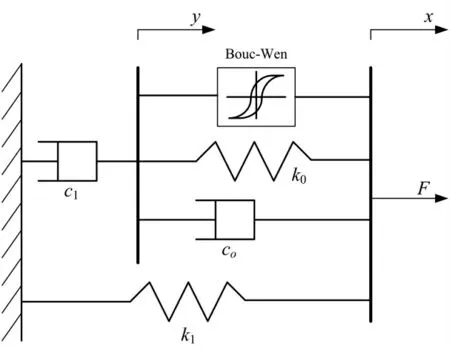
图2 磁流变阻尼器现象模型

其中变量y 为:

滞变位移z 由式(3)决定:

其中c1为低速状态下的粘性阻尼系数,k1为磁流变阻尼器的刚度系数,c0为高速状态下的粘性阻尼系数,x0为磁流变阻尼器的初始位移,k0为高速剪切状态下的刚度系数,α 为滞环比例因子,γ、β、A和n 为磁滞回环参数,通过调整参数γ、β、A 的值来调整控制磁滞回环形状。
Bouc-Wen 现象模型系数与施加在磁流变阻尼器上的电压之间的关系为:

式(4)中u 由一阶滤波器给出:u˙=-η(u-v),v 是施加在磁流变阻尼器上的电压。 现象模型的14 个系数如表1 所示[2]。

表1 磁流变阻尼器Bouc-Wen 现象模型系数
2 养护工具车悬架动力学模型
悬架是影响养护工具车驾驶平顺性、乘坐舒适性以及操纵稳定性的关键部件,车辆悬架系统动力学模型主要包括7 个自由度的全车模型、4 个自由度1/2 车辆模型以及2 个自由度1/4 车辆模型。 本文采用1/4 车辆悬架模型进行半主动控制研究,该模型由簧载质量、非簧载质量、悬架刚度与阻尼和轮胎刚度组成, 能准确反映车辆车身加速度响应、悬架相对动扰度和位移,具有动力学参数少,能很好地反映设计与车辆性能之间内在特性的特点,如图3 所示。

图3 1/4 车辆悬架模型
模型的动力学方程为:

式(5)中m2为由弹性原件支撑的车身等簧载质量,m1为包括车轮、 车轴、 制动总成等非簧载质量,k2为车身悬架刚度,k1为轮胎刚度,x2和x1分别为簧载质量和非簧载质量的位移,xg为路面位移输入,c 为悬架阻尼系数。磁流变阻尼器产生的可控阻尼力为式(1)中的F。
路面不平度的随机变化是导致养护工具车辆产生振动的主要因素之一。 研究车辆在随机路面下的动力学响应时,通常是对高斯白噪声进行积分或滤波产生。 本文采用的是滤波法,具体表达为:

针对B 级路面, 路面不平度系数为G0=64×10-6m2/m-1,u0为养护工具车速度,w(t)为高斯白噪声, f0为下截止频率,取0.01 m-1,当f0为0 时,路面输入为积分高斯白噪声;n0为参考空间频率,取n0=0.1/m。
车辆悬架动挠度为x2-x1,轮胎动变形为xg-x1,以悬架动挠度、轮胎动变形、车轮垂向速度x˙1以及车身垂向速度x˙2作为状态变量,则状态向量X=[x2-x1x2xg-x1x˙1]T,以车身垂直加速度、悬架动挠度和轮胎动载荷为输出变量,则Y=[x¨2x2-x1k1(xgx1) x˙2-x˙1]T。 状态方程及输出方程为:

3 半主动控制仿真分析
车辆悬架控制方式包括主动控制、半主动控制和被动控制。 主动控制效果好,但是其结构复杂、造价高昂,手动控制算法约束等原因导致无法大规模推广应用;而被动悬架则无法根据道路状况和车辆运行状态及时动态调节阻尼特性, 适应能力差,控制效果不理想。 基于磁流变阻尼器的半主动控制通过改变阻尼器刚度及阻尼等参数,控制效果接近主动控制并且对使用环境要求不高,维护简便,成本较低,成为国内外工程领域研究的热点。 半主动控制的重点在于确定磁流变阻尼器输出的阻尼力与输入激励之间的关系,本文研究的是“on-off”半主动控制策略,其控制表达式如下:

式(8)中v=x˙2-x˙1为悬架的相对速度,FI=0.5A表示控制电流为0.5 A 时磁流变阻尼器输出的阻尼力,FI=0表示没有控制电流时磁流变阻尼器输出的阻尼力。
为了验证磁流变阻尼器现象模型及其半主动控制策略的应用效果,本文采用数值分析软件进行仿真。 被动控制I=0 是在控制过程中不接通磁流变阻尼器的电源,即磁流变液始终为牛顿流体,磁流变阻尼器的阻尼力最小为FI=0;被动控制I=0.5 A 是在控制过程中始终打开磁流变阻尼器的电源,保持电流恒定为0.5 A,此时磁流变液转变为Bingham半固体状态,磁流变阻尼器的阻尼力最大为FI=0.5A。 车辆系统的参数[9]取m2=360 kg,m1=40 kg,k2=20 kN/m,k1=200 kN/m,c=200 N/m。养护作业车在B 级路面上以20 m/s 的速度行驶。
为了评价车辆的性能,本文将半主动控制与被动悬架车身的垂直加速度响应进行对比(图4),在随机路面激励下“on-off”半主动控制效果优于被动悬架,车辆车身的加速度最大值明显减小。

图4 车身垂直加速度
表2 为在随机激励下车辆车身垂直加速度响应情况及悬架动扰度。 从仿真分析结果可以看出,磁流变阻尼器控制电流为0 时,相对被动悬架的控制效果,车身加速度的最大值变化不大,悬架动扰度的最大值增加了29.9%; 控制电流恒定为0.5 A时,车身加速度和悬架动扰度的最大值相对被动悬架增加了74.4%和92.7%; 说明这2 种控制策略下车辆车身的加速度响应及悬架动扰度均变大,会导致车辆行驶过程中的平顺性恶化。 采用“on-off”半主动控制策略时,与被动悬架相比,车身加速度最大值下降了23.1%,悬架动扰度下降了14.9%,控制效果明显提升,对于提高养护工具车行驶的平顺性效果最好,明显提高了养护工具车的乘坐舒适性。

表2 车身垂直加速度响应情况及悬架动扰度
4 结论
研究了一种基于智能材料磁流变液作为阻尼控制器,在养护工具车悬架控制中的应用。 在高斯白噪声激励下,通过对比被动悬架、被动控制、“onoff” 半主动控制下车身的加速度响应及悬架动扰度,数值分析证明采用磁流变阻尼器作为半主动控制器能有效降低车身的加速度响应并减小车辆悬架的动扰度,改善行驶过程中的平顺性,提高养护工具车乘坐的舒适性,说明磁流变阻尼器具有很好的应用前景。
