基于双干扰机协同的SAR-GMTI/InSAR 有源欺骗干扰方法
2022-07-28刘业民陆正文
刘业民,袁 露,周 瑜,陆正文,吴 韬
(1.中国人民解放军 32579 部队,广西 桂林 541001;2.国营第722 厂,广西 桂林 541001)
0 引言
合成孔径雷达(SAR)具有全天时、全天候和高处理增益的工作特点,是战略侦察和战场监视系统的重要组成部分,它与地面运动目标指示(GMTI)相结合,即SAR-GMTI,可获得全面详尽的战场态势图。干涉合成孔径雷达(InSAR)是最早提出且目前发展最为成熟的雷达三维成像体制,是对SAR 信息获取能力的有力增强,可进一步获取到观测目标的细节特征。因此,为了提高己方地面军事目标和战略要地的战场防护和生存能力,研究和发展对SAR-GMTI/InSAR的干扰技术具有重要的现实意义。
干扰通常分为无源和有源干扰,有源干扰又可分为压制干扰和欺骗干扰。对SAR-GMTI/InSAR 有源欺骗干扰作为SAR/InSAR 对抗的一个重要方向,具有干扰功率低、灵活性强、逼真度高等优点,已成为目前雷达电子战研究的热点和难点问题。干扰与抗干扰始终是电子战永恒的主题,两者相互对立,共同发展。随着对SAR-GMTI/InSAR 干扰方法的发展,相应的抗干扰方法和措施也随之提出。在对抗SAR-GMTI 方面,学者们发现单部干扰机生成虚假运动目标的方法在对抗SAR-GMTI 系统时有其固有的缺陷,即干扰信号经SAR-GMTI 系统处理后,雷达系统估计的径向速度与干扰信号初始设定的径向速度不一致,且经定位后虚假运动目标方位向位置与干扰机方位向位置一致,与干扰信号初始设定位置无关。针对此缺陷,文献[12]提出了一种基于干涉相位的虚假目标鉴别算法,可鉴别出静止或运动虚假目标。在对抗InSAR 方面,学者们研究发现单部干扰机生成虚假目标对抗InSAR 时,其虚假目标的干涉相位始终为常数,其干涉相位等于干扰机天线实际所处位置的干涉相位。针对这一特点,文献[13]提出了鉴别和抑制InSAR 虚假目标的抗干扰方法。随着这些抗干扰方法的提出,一些学者研究了相应的干扰方法。在对抗SAR-GMTI 方面,文献[2]提出了一种基于双干扰机协同的虚假运动目标生成方法,通过合理选择2 个干扰机所调制的散射系数之比保证干涉相位和设定的径向速度相匹配。随后,文献[11]提出了一种新的基于双干扰机协同对抗双通道SAR-GMTI 的干扰方法,该方法相比文献[2]所提方法更为简洁,只需通过求解线性方程组,将求解出的复调制系数应用到每部干扰机上,生成的干扰信号就可有效控制虚假运动目标的径向速度和方位向位置。在对抗InSAR方面,文献[14]提出了一种基于双干扰机协同的In-SAR 三维虚假场景生成方法;借鉴文献[11]思路,文献[9]提出了一种基于多转发器协同的InSAR 三维虚假场景生成方法。
上述关于双(多)干扰机协同的干扰方法只适用于对抗SAR-GMTI 或InSAR,其通用性不强。当前,随着SAR 的广泛应用,为适应不同应用需求,不同种类的SAR 体制应运而生,除前面提到的SAR-GMTI和InSAR 外,还有圆周SAR、极化SAR 以及视频SAR等。对干扰方而言,针对不同类型的SAR 体制,由于工作体制和工作方式的不同,通常需研发出不同类型的干扰系统,这既增加了研发成本,也不利于干扰实施。因此,研究针对2 种或2 种以上不同SAR 体制的通用干扰方法和手段,是未来SAR 干扰措施研究的发展趋势之一,具有长远的应用前景。
基于以上背景和问题,本文提出了一种基于双干扰机协同的SAR-GMTI/InSAR 有源欺骗干扰方法。该方法揭示了虚假(动)目标与真实目标在SAR/In-SAR 图像域中的本质区别,在此基础上,给出了对抗SAR-GMTI/InSAR 统一的干扰实施步骤,对两或三通道SAR-GMTI 系统均适用,其方法通用性强。本文首先阐述了单干扰机假目标SAR-GMTI/InSAR 的目标特性;在此基础上,提出了一种基于双干扰机协同的SAR-GMTI/InSAR 有源欺骗干扰方法;然后给出了该方法的具体实施步骤;最后,仿真实验验证了所提方法的可行性。
1 单干扰机假目标对抗SAR-GMTI/InSAR的目标特性
本节分别阐述单干扰机情形下生成虚假运动目标对抗SAR-GMTI 以及生成虚假静止目标对抗In-SAR 的目标特性,并分析它们的固有缺陷和不足。
1.1 单干扰机假目标对抗SAR-GMTI 的定位特性
以图1 所示正侧视2 天线SAR-GMTI 为干扰对象,SAR 载机平台以速度v沿直线匀速运动,载机平台高度为,以载机飞行的方向为轴正方向、垂直于轴在地面的投影为轴正方向建立右手直角坐标系,原点为当方位向慢时间t=0 时,SAR 载机在地面上的投影点。SAR 子天线发射雷达信号,子天线和同时接收雷达信号,2 天线沿SAR 载机航迹方向分布,间距为。在SAR 成像条带区域内放置2部干扰机和,其坐标分别为(x,y,0)和(x,y,0)。此外,成像条带区域内有一个以速度v沿轴方向运动的点目标,当t=0 时,其坐标位置为(x,y,0)。则对于任意慢时间t,子天线和到点目标的瞬时斜距为:
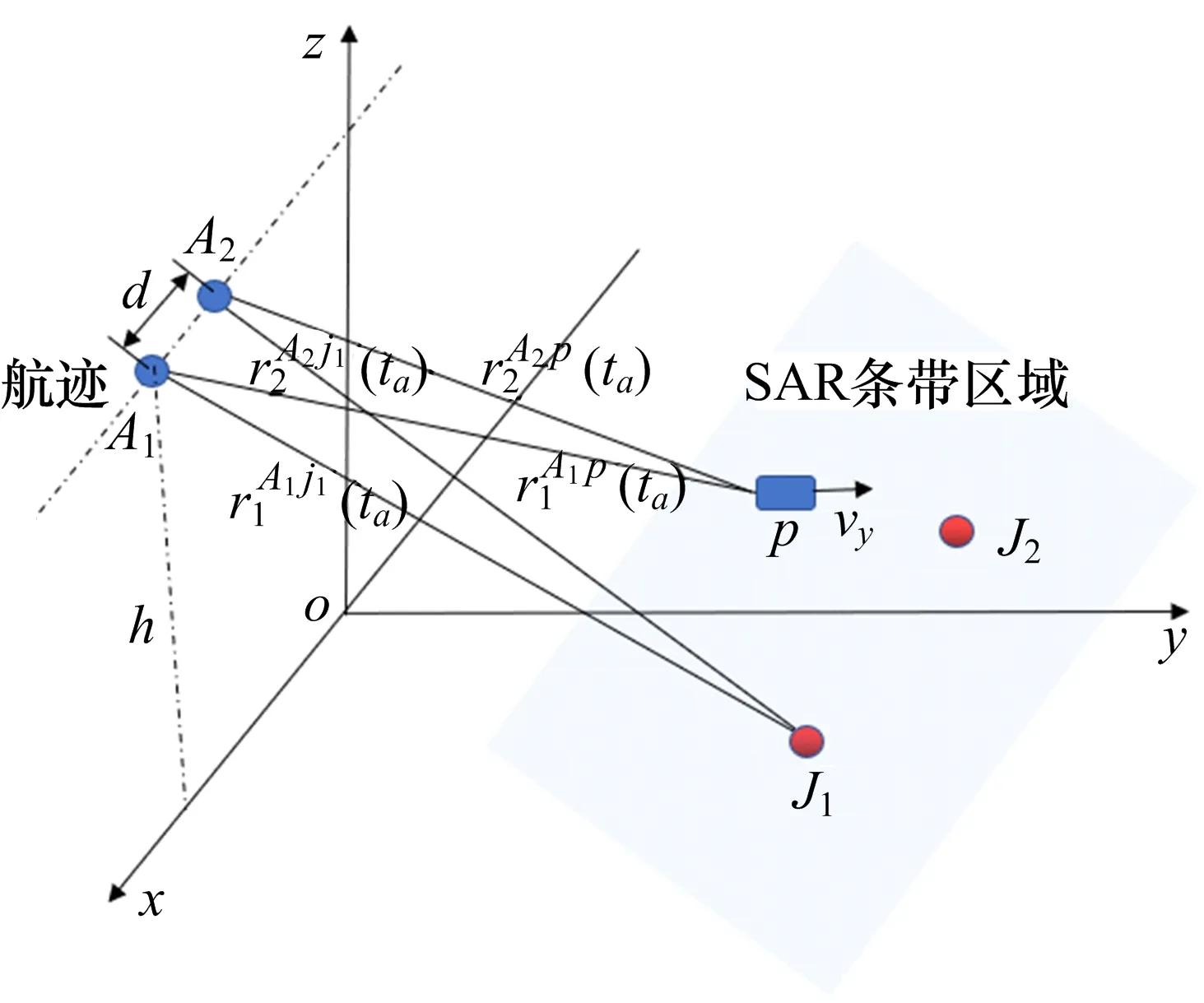
图1 干扰SAR-GMTI 几何示意图

式中,̂为估计的干涉相位。从式(5)可以看出,虚假运动目标估计的径向速度与真实目标和干扰机的位置均有关系。
由动目标的SAR 成像特性可知,径向速度为̂的动目标在SAR 图像中方位向位置与实际位置之间偏移量为:

此外,虚假目标在SAR 图像中方位向位置为:
由式(8)可知,虚假运动目标定位后方位向位置与干扰机方位向位置相同,而与设定位置无关。这一特性是单干扰机情形下生成虚假运动目标对抗SAR-GMTI 时存在的固有缺陷,利用这一特性,文献[12]提出了相应的抗干扰措施,可以鉴别出虚假运动目标。
1.2 单干扰机假目标对抗InSAR 的干涉相位特性
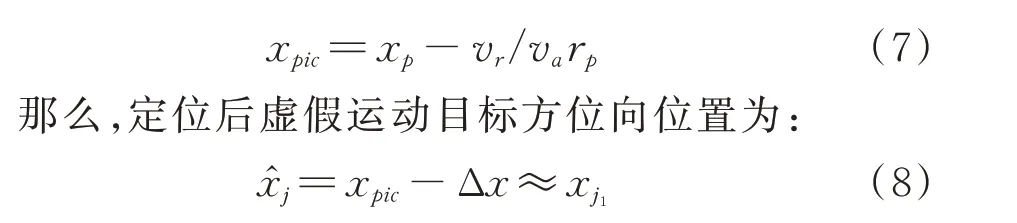
如图2 所示,以机载单航过InSAR 测绘模式为例,工作时主天线发射信号,主天线和辅天线同时接收信号,主、辅天线垂直于SAR 载机航迹方向分布,其基线长度为。载机以速度V沿轴正方向飞行,垂直于轴在地面的投影为轴正方向建立右手直角坐标系,原点为当方位向慢时间t=0 时主天线在地面上的投影点,离地面的垂直高度为。
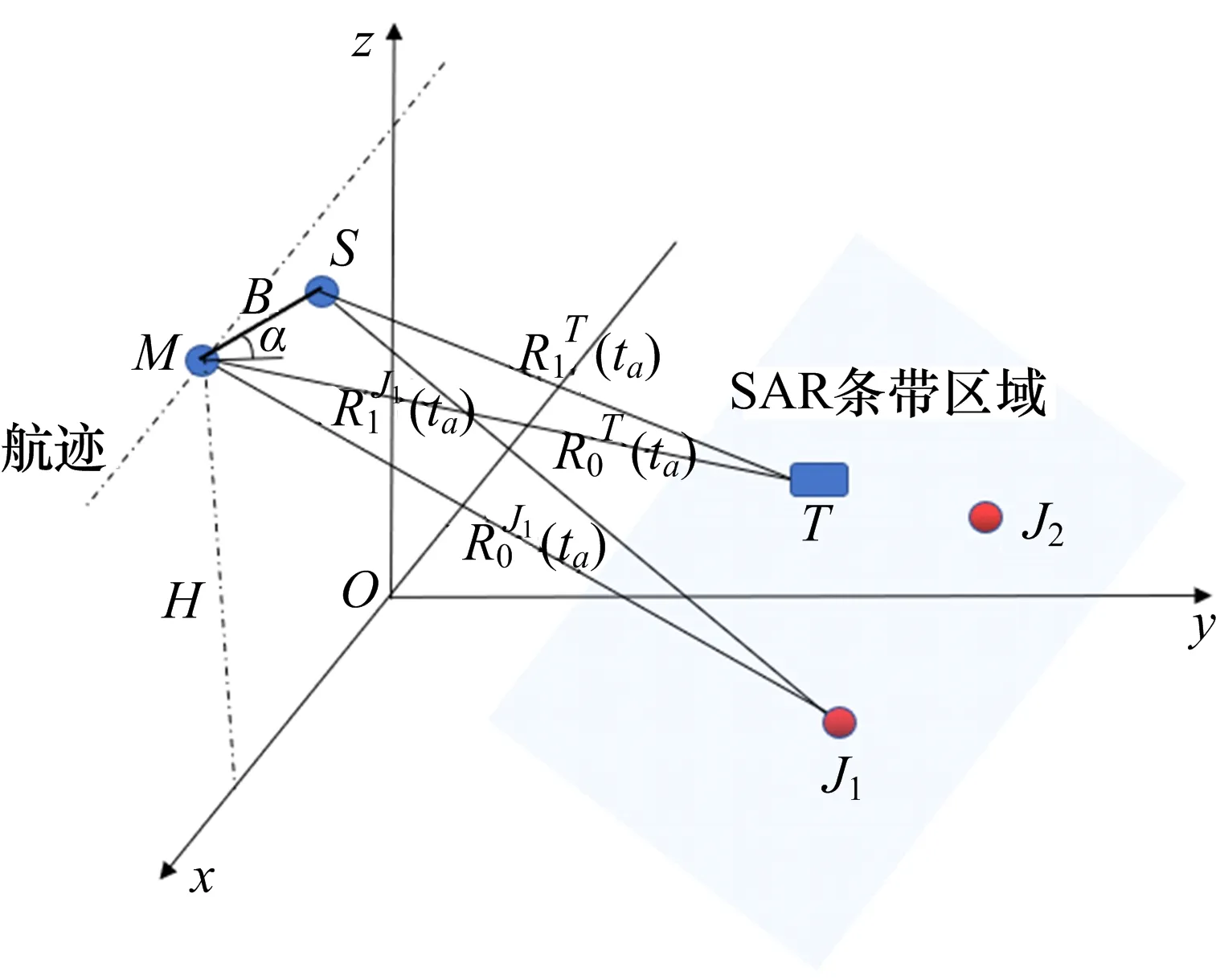
图2 干扰InSAR 几何示意图

假设2 部干扰机只有干扰机工作。同理,对于任意慢时间t,主、辅天线到干扰机的瞬时斜距可表示为:

从式(12)可以看出,在特定的干扰实施场景中,由于干扰对象InSAR 系统参数、、以及均为固定值,且干扰机在实施干扰时,位置参数R和y通常也是不变的。因此,单干扰机情形下对抗InSAR 系统时,其虚假目标的干涉相位为一常数,虚假目标的干涉相位均等于干扰机天线实际所处位置的干涉相位。利用这一特性,文献[13]提出了相应的抗干扰措施,可以鉴别和抑制干扰目标或干扰场景。
2 基于双干扰机协同干扰方法
在提出双干扰机协同干扰方法之前,首先分析In-SAR 系统中真实目标和虚假目标在图像域中的区别。目标的回波信号经过成像处理和主、辅图像配准后,其主、辅图像域信号可表示为:


式中,Δ=y-y,由于′≈,因此角度可近似为干扰机到InSAR 主天线的俯仰角,这个角度可以通过截获SAR 信号来波方向获得。

图3 真假目标与雷达相对位置示意图

对比式(13)和式(23)不难发现,辅天线接收的干扰信号中,单干扰机生成的虚假目标在真实目标信号基础上附加了一个指数调制相位(对应于式(23)最后一个指数项)。
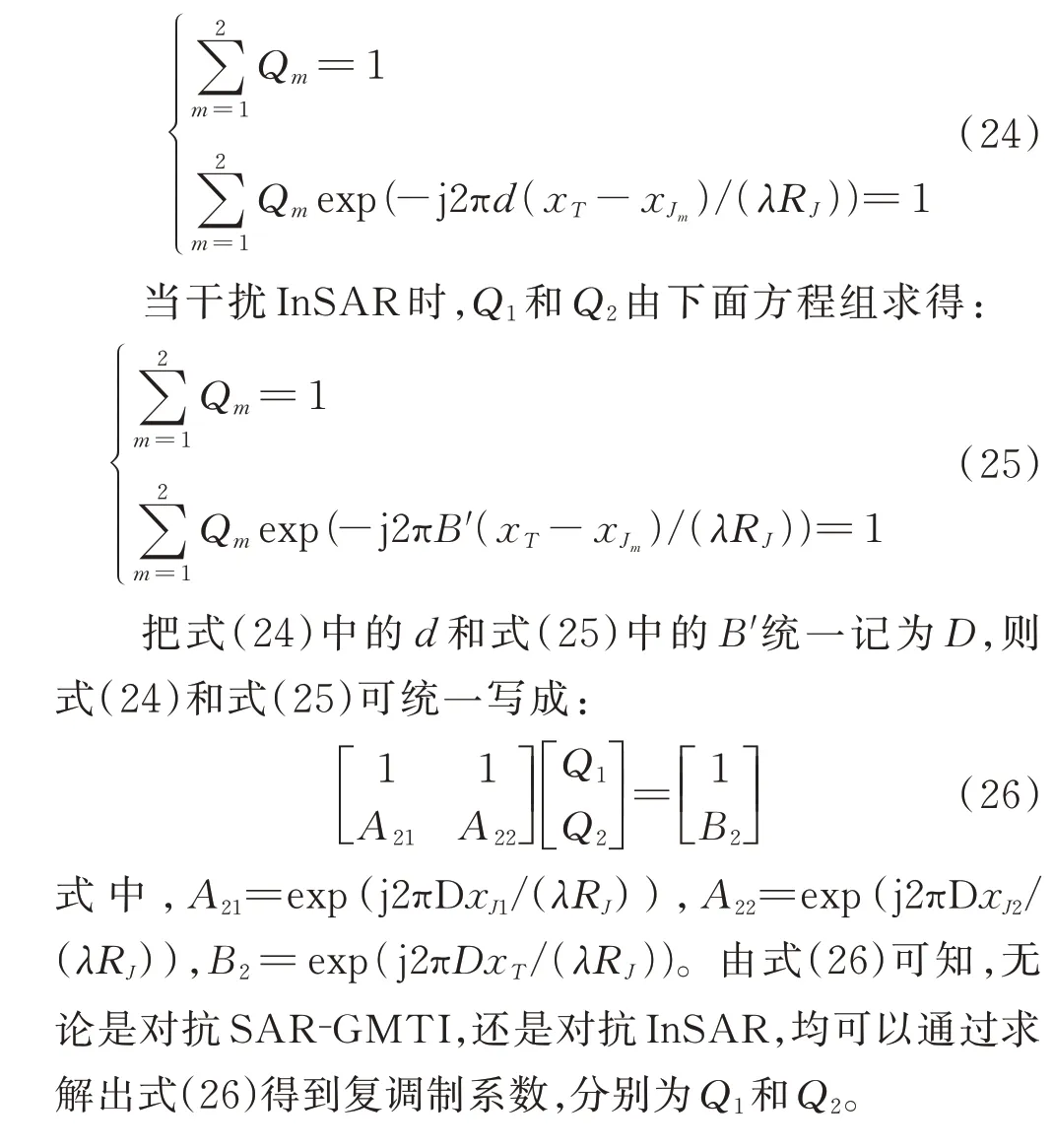
根据第1 节可知,单干扰机对抗SAR-GMTI/In-SAR 均存在着固有的缺陷。为克服这一不足,本文提出了一种基于双干扰机协同的SAR-GMTI/InSAR 有源欺骗干扰方法,并且将对抗SAR-GMTI 和InSAR的干扰实施步骤进行了统一,提高了方法的通用性。
如图1 和图2 所示,假设干扰机和干扰机协同工作,每个虚假运动或静止目标均由2 部干扰机共同生成,在每部干扰机发射的干扰信号上调制一个复调制系数,旨在消除式(4)和式(23)的附加指数调制相位,使干扰信息达到以假乱真的效果。为便于统一表述,对第1 节和第2 节的一些符号进行统一,假设干扰机和干扰机处于相同的距离单元,距离向位置为R,其方位向位置分别为x和x,拟生成的虚假运动或静止目标的方位坐标为x。为了消除式(4)和式(23)的附加指数调制相位,得到式(2)和式(13)的表达式,假设干扰机和干扰机的复调制系数分别为和,当 干 扰SAR-GMTI 时,和由 下 面 方 程组求得:
3 干扰实施步骤
综合以上分析,给出本文所提方法的干扰实施步骤:
Step 1:侦察和调制干扰信号。当其中一部干扰机截获到SAR-GMTI 或InSAR 发射的雷达信号后,对雷达信号进行分析,侦察SAR-GMTI 或InSAR 需实施干扰的相关参数。根据SAR 欺骗干扰原理,利用式(27)对截获的雷达信号在距离向做延时处理,在方位向做多普勒调制,即:

式中,符号⊗表示卷积运算符,(t,t)为干扰机截获SAR-GMTI 或InSAR 发 射 的 雷 达 信 号,(·)为 冲击函数,为光速;Δ(t)为干扰机到雷达瞬间斜距与虚假目标到雷达的瞬间斜距差。当第二部干扰机截获到雷达信号后,利用式(27)调制截获后的干扰信号。
Step 2:根据式(26)求解复调制系数和。对于SAR-GMTI 而言,需要侦察出干扰机到雷达的最近斜距R以及天线间距;对于InSAR 而言,需要侦察出干扰机到雷达的最近斜距R、基线长度,基线倾角和干扰机到InSAR 主天线的俯仰角。
Step 3:双干扰机协同干扰。2 部干扰机通过有线通信互相共享侦察参数,以及复调制系数和,然后根据SAR-GMT 或InSAR 的脉冲重复频率(PRF),每部干扰机分别向需干扰的雷达协同转发各自调制的干扰信号。
4 仿真实验与结果分析
4.1 对抗SAR-GMTI 有源欺骗干扰
SAR-GMTI 系统采用方位向一发两收的工作模式,其系统仿真参数如表1 所示。为简便起见,采用坐标系来描述干扰场景信息,空间坐标系和的坐标转换关系为=,=(+)。

表1 SAR-GMTI 系统仿真参数
假定2 部干扰机距离向位置相同,方位向位置间距为30 m。第1 部干扰机和第2 部干扰机坐标分别为(0 m,10 000 m)和(30 m,10 000 m)。在干扰场景中设定6 个虚假目标,其距离向径向速度设定和初始位置如表2 所示。

表2 虚假目标运动速度和位置设定


作为干扰效果对比,表3 首先给出了单干扰机对抗SAR-GMTI 的误差,可以看出,在单干扰机情形下,虚假静止目标也会作为运动目标同时被检测出来,估计的速度与原设定速度值不一致,且虚假静止(运动)目标位置经SAR-GMTI 定位后,均与单干扰机方位向位置一致,容易被鉴别出来。表4 给出了本文所提方法对虚假运动目标速度估计和方位向定位结果以及它们的误差,可以看出,所提方法并未将虚假静止目标作为运动目标检测出来,且虚假运动目标速度和方位向位置估计值与表2 中设定值之间误差很小,验证了本文所提方法能够很好地模拟真实运动目标。
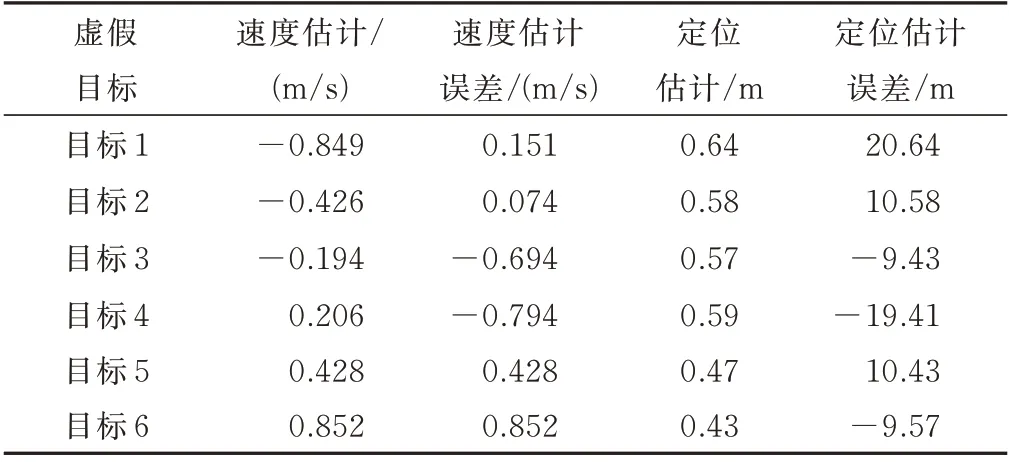
表3 虚假目标速度估计误差及定位误差(单干扰机)
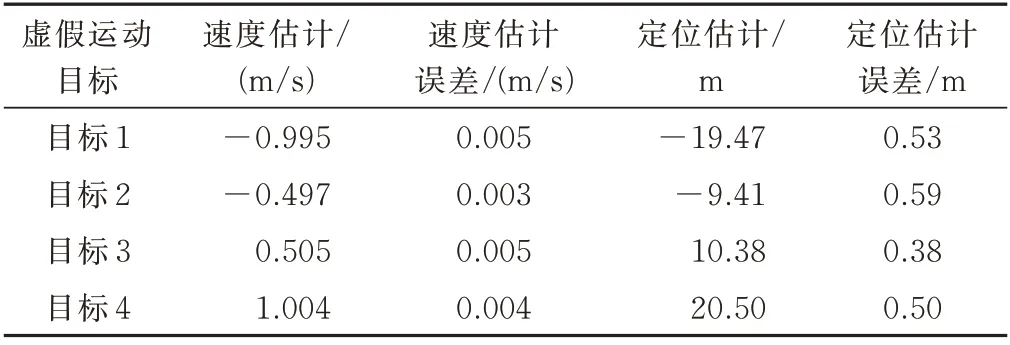
表4 虚假运动目标速度估计误差及定位误差(所提方法)
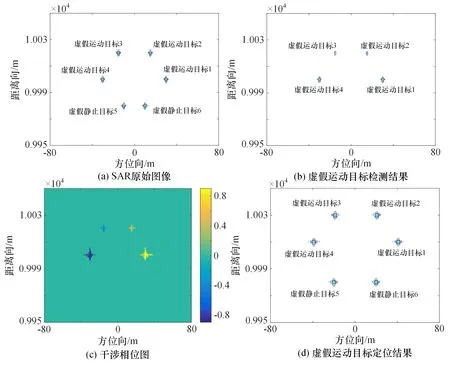
图4 虚假运动目标检测、干涉和定位结果
4.2 对抗InSAR 有源欺骗干扰
单航迹InSAR 系统工作时主天线发射信号,主、辅天线同时接收信号,工作模式为条带式,其系统仿真参数如表5 所示。
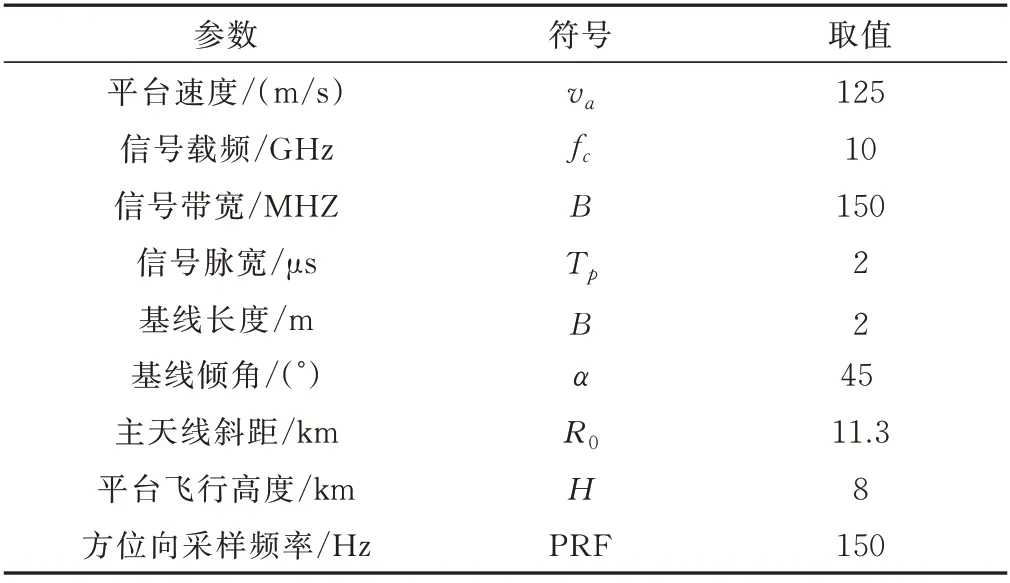
表5 InSAR 系统仿真参数
2 部干扰机的坐标分别为(0 m,8 000 m,0 m)和(30 m,8 000 m,0 m)。成像场景设置为440 m×400 m 平地,在场景中设定4 个虚假目标,分别为目标1(-30 m,8 000 m,10 m),目标2(0 m,8 000 m,10 m),目标3(30 m,8 000 m,10 m)和目标4(0 m,8 030 m,10 m)。设定干杂比为5 dB,利用所提方法产生干扰,其InSAR 处理结果如图5所示。图5 分别给出了主通道SAR 图像,解缠后最终干涉相位图、地距下的高度反演图以及高度反演图在方位-高度平面、地距-高度平面的投影。由图5(c)—(e)容易看出假目标设定位置与反演坐标对比,误差很小,与设定值基本吻合。

图5 InSAR 处理结果
为进一步定量说明本文所提方法的有效性,表6 给出了真实目标、本文所提方法和单干扰机生成虚假目标的干涉相位。从表6 中可知,所提方法的干涉相位与目标位置有关,且与真实目标的干涉相位基本吻合,而单干扰机生成假目标的干涉相位均与干扰机干涉相位相同,与目标设定位置无关。

表6 真假点目标干涉相位对比
5 结束语
本文针对单部干扰机生成虚假(动)目标干扰方法在对抗SAR-GMTI 或InSAR 时存在的不足,提出了一种基于双干扰机协同的SAR-GMTI/InSAR 有源欺骗干扰方法。理论分析和仿真实验结果表明:本文方法既可以干扰SAR-GMTI,也可以干扰InSAR,通用性强;利用2 部干扰机的空间自由度,本文方法可使得现有利用单部干扰机生成虚假(动)目标时的固有缺陷的抗干扰方法失效。
值得指出的是,使用本文所提方法时,需要预先获取到干扰机到雷达的最近斜距、天线基线长度、干扰机到雷达的俯仰角等侦察参数。因此,如何获取这些侦察参数、进一步提高本文所提方法的实用性是下一步需要研究的问题。■
