无人机航摄仪摆扫机构系统的精度及稳定性研究
2022-07-27姜振海张作良郭训薇
姜振海,张作良,郭训薇,王 超
(1.长春工业大学机电工程学院,吉林 长春 130012;2.南京华群光电技术有限公司,江苏 南京 210012;3.长光卫星技术有限公司,吉林 长春 130031)
1 引言
随着各行各业对地理空间信息需求的增长,世界各国都把地理信息看成是战略性的信息资源。无人机航摄仪作为获取地理空间信息的高精度仪器,在多领域上都表现出无法替代的作用[1-3]。因此,国内外众多研究学者对无人机航拍应用做了大量研究。文献[4]提出了基于无人机航拍的矿山地质精细测绘方式,该测绘方式比传统测绘方式对矿山地质测绘清晰度高;文献[5]以无人机航拍为基础,采用面向对象法提取了企鹅数量与分布状况,并结合历史资料分析了南极典型区域企鹅数量变化趋势;文献[6]以无人机航拍为基础,采用图像拼接技术和三维建模技术生成数字模型估计海冰表面的相对高度和粗糙度;文献[7]应用一架小型翼伞无人机获取马铃薯叶片图像,根据叶片叶绿素的含量合理地施加氮肥;文献[8]提出一种基于无人机影像检测道路裂缝的方法,在对影像进行加权平均灰度化、直方图均衡化、中值滤波去噪等操作后,使用迭代二值化方法获得清晰的二值化影像,并采用积分投影的方式识别裂缝位置加以标记;文献[9]提出了一种以无人机为相机载体基于颜色特征和单目视觉的钢锈蚀区域检测方法,根据锈蚀区域的颜色特征在HSV颜色空间内进行颜色筛选,根据单目视差原理,对连续帧进行特征匹配从而确定物体前后关系,排除背景误差造成的误判,最终实现钢结构的锈蚀检测。
保证无人机在高速飞行中拍摄的精度和稳定性是无人机航摄仪应用过程中至关重要的问题[10-12]。针对这一问题,采用虚拟仿真与测试试验相结合的方法。应用ANSYS软件对摆扫机构系统主要组件进行模态分析,验证其结构不会与无人机发生共振;应用Fluent软件对摆扫机构系统流场域仿真分析得到温度分布图,用热学试验验证在高温和低温时控制系统的精度和相机成像的稳定性;应用飞行模拟转台模拟无人机飞行姿态变化对摆扫机构系统做摇摆试验验证其角速度精度;用跑车试验验证相机在高速运动时系统工作稳定、相机成像清晰。
2 摆扫机构系统建模及模态分析
2.1 摆扫机构系统建模
摆扫机构系统是无人机航摄仪的部分产品,宽幅摆扫相机通过摆扫机构系统能够使光学载荷沿单轴实现特定角度的间歇摆扫运动和稳定成像,在垂直于航向的方向的多个位置进行稳定成像,并保证重叠率,通过后期拼接获得一幅完整的高分辨率图像,最终获得垂直和斜拍测图产品。摆扫机构系统安装主要部件包括驱动电机、舵机、编码器、相机、俯仰框架、外部框架、电阻丝式加热器等。外部框架与飞机转接板相连,小型风扇固定在外部框架上,飞机转接板预留接口,通过减振器与飞机机体相连,摆扫框架采用直流力矩电机直驱的方式驱动其转动,高精度编码器实现闭环控制,并设置锁紧机构和限位机构。摆扫机构的总体布局和三维模型,如图1、图2所示。

图1 摆扫机构系统的总体布局图Fig.1 General Layout of Sweeping Mechanism System

图2 摆扫机构系统三维模型图Fig.2 Three-Dimensional Model of Swing Mechanism System
2.2 摆扫机构系统模态分析
结构模态反应了结构的刚度,对于摆扫结构系统,其主要的机械零件为飞机转接板、外部框架和摆扫框架,应用ANSYS软件分别对其进行模态分析,分析结果,如图3所示。

图3 主要组件模态分析结果图Fig.3 Modal Analysis Results of Main Components
由图3可知,飞机转接板的一阶模态130.24Hz,二阶模态为201.08Hz;摆扫框架的一阶模态为560.46Hz,二阶模态为566.74Hz;外部框架的一阶模态为149.73Hz,二阶模态为278.68Hz。而正常工作时无人机第一阶激振频率为92.5Hz,第二阶激振频率为185Hz,主要组件不会和无人机发生共振,主要组件的稳定性满足设计要求。
3 摆扫机构系统热学分析及热学试验
3.1 摆扫机构系统热学分析
温度的变化会引起结构的变化从而影响相机的精度和稳定性[13-15]。应用Fluent软件对含有电阻丝式加热器的摆扫机构进行仿真分析,研究摆扫机构的温度分布情况。建立摆扫机构的流体模型,设置入口速度为2m/s,环境温度为298K,墙体向外辐射温度为353K,得到摆扫机构系统两个平面的温度分布,如图4所示。

图4 摆扫机构系统温度分布图Fig.4 Temperature Distribution of Sweeping Mechanism System
由图4可知,摆扫机构系统流体域最高温度为346K,最低温度为298K,大部分流体域的温度低于333K。
3.2 摆扫机构系统热学试验
为了确定温度的变化是否会对摆扫相机的精度和稳定性造成影响,对摆扫机构进行高温存储试验、低温存储试验、高温工作试验和低温工作试验。摆扫机构系统热学试验受试系统不包含载荷系统。
高温存储试验初始温度为室温,试验温度为+60℃,经历1次高温存储试验,试验中的温度平均升降速率为(3~5)℃/min,高温存储时间不低于2h。高温存储试验过程,如图5 所示。低温存储试验初始温度为室温,低温存储温度为-30℃,经历1 次低温存储试验,低温存储时间不低于2h。低温存储试验过程,如图6所示。

图5 高温存储试验剖面图Fig.5 High Temperature Storage Test Profile
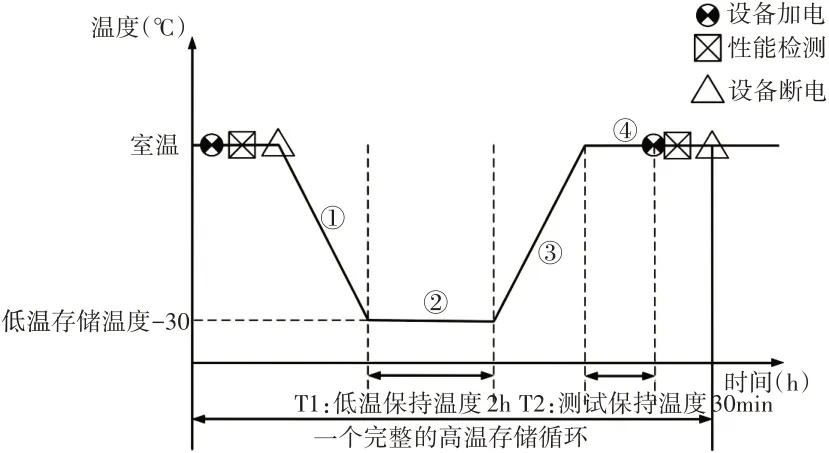
图6 低温存储试验剖面图Fig 6 Profile of Cryogenic Storage Test
高温工作试验工作环境压力为正常环境压力,循环温度为+40℃,试验次数为1次,试验中的温度平均升降速率为(3~5)℃/min,工作时间不低于2h。高温工作试验过程,如图7所示。
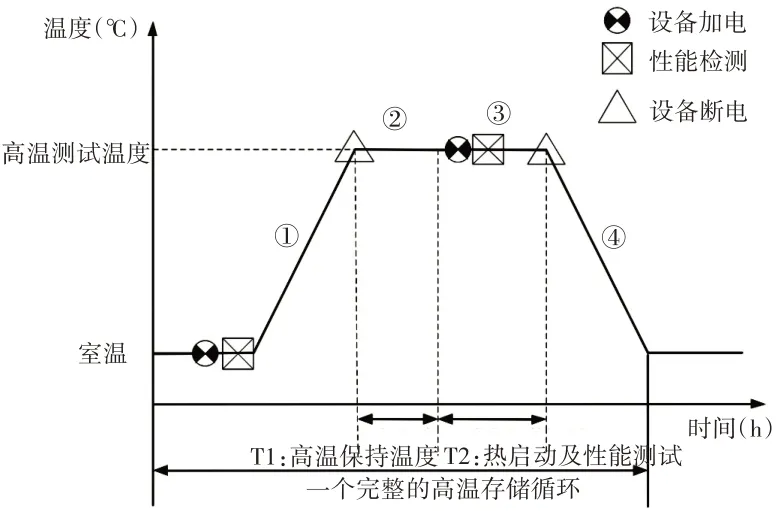
图7 高温工作试验剖面图Fig.7 High Temperature Working Test Profile
低温工作试验工作环境压力为正常环境压力,循环温度为-10℃,试验次数为1次,试验中的温度平均升降速率为(3~5)℃/min,工作时间不低于2h。低温工作试验过程,如图8所示。

图8 低温工作试验剖面图Fig.8 Low Temperature Working Test Profile
摆扫机构热学试验的结果,如表1所示。
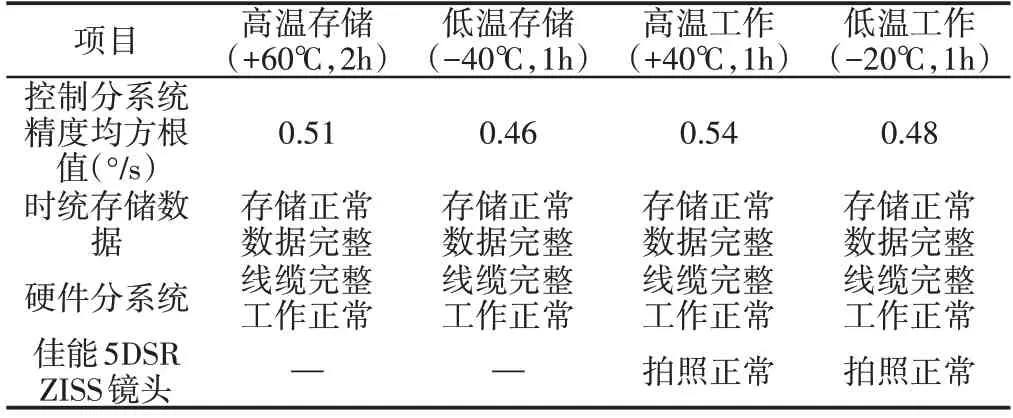
表1 摆扫机构热学试验结果Tab.1 Thermal Test Results of Sweeping Mechanism
摆扫机构的时统存储正常,数据完整;硬件分系统正常工作;相机拍照正常。由于热箱内存在振动,控制分系统精度均方根值较桌面静止环境下的0.3°/s略大,属于正常现象。热学试验完成后,在桌面静止时重新测量控制分系统精度,其均方根值仍为0.3°/s。摆扫机构具有良好的控制系统精度和稳定性。
4 摆扫机构系统摇摆测试试验
为验证宽幅摆扫相机在实际姿态变化环境下的角速度精度,利用飞行模拟转台模拟飞机飞行时的姿态变化对摆扫机构系统做摇摆试验。
摆扫机构系统摇摆试验由摆扫机构结构、载荷、摆扫机构硬件电路、摆扫机构元器件系统等组成。摆扫机构摇摆测试试验分为摸底试验和正式试验两种,试验条件,如表2所示。

表2 摆扫机构系统摇摆测试试验条件Tab.2 Test Conditions for Swing Test of Swing Mechanism System
摆扫机构系统试验,如图9所示。

图9 摆扫机构系统试验图Fig.9 Test Diagram of Swing Mechanism System
摸底试验和正式试验角速度精度图,如图10、图11所示。
图10和图11中,横坐标表示时间,单位是ms,纵坐标表示速度,单位是°/s。摸底试验中,单条轨迹角速度的范围为(-0.35~0.3)°/s,单条轨迹角速度均方根值为0.3°/s,整个测试时间的角速度均方根值为0.5°/s;正式试验中,单条轨迹角速度的范围为(-0.75~1.1)°/s,单条轨迹角速度均方根值为0.8°/s,整个测试时间的角速度均方根值为1.2°/s。宽幅摆扫相机伺服控制指标要求停顿时刻角速度精度(相对于零位)小于1.35°/s(3σ),试验证明宽幅摆扫相机的角速度精度满足设计要求。

图10 三轴1°/Hz输入时角速度精度图Fig.10 Angular Velocity Accuracy Diagram for Triaxial 1 Degree/Hz Input

图11 三轴3°/Hz输入时角速度精度图Fig.11 Angular Velocity Accuracy Diagram for 3 Degree/Hz Input of Three Axes
图10和图11中,横坐标表示时间,单位是ms,纵坐标表示速度,单位是°/s。摸底试验中,单条轨迹角速度的范围为(-0.35~0.3)°/s,单条轨迹角速度均方根值为0.3°/s,整个测试时间的角速度均方根值为0.5°/s;正式试验中,单条轨迹角速度的范围为(-0.75~1.1)°/s,单条轨迹角速度均方根值为0.8°/s,整个测试时间的角速度均方根值为1.2°/s。宽幅摆扫相机伺服控制指标要求停顿时刻角速度精度(相对于零位)小于1.35°/s(3σ),试验证明宽幅摆扫相机的角速度精度满足设计要求。
5 摆扫机构系统跑车试验
摆扫机构系统跑车试验的主要目的是验证各分系统在高速运动环境下的精度及稳定性。
摆扫机构系统跑车试验由摆扫机构系统、载荷系统、GPS系统和飞控系统组成,载荷使用佳能5DSR相机和ZISS镜头。
摆扫系统在车辆上的固定方式为摆扫系统安装在地面工装上,地面工装固定在车辆后备箱。
进行试验时室外温度为(-28~-15)℃,试验持续30min,车速平均为36km/h。摆扫机构系统跑车试验的状态,如图12 所示。摆扫机构系统成像的图像,如图13所示。

图12 摆扫机构系统跑车试验状态图Fig.12 Test Status Chart of Swing-Sweep Mechanism System for Sports Car

图13 摆扫机构系统成像图Fig.13 Imaging Chart of Sweeping Mechanism System
在进行摆扫机构系统跑车试验时,时统存储程序存储正常,数据完整;伺服控制上电自检和摆扫控制正常;硬件电路板和线缆工作正常;图像完整质量清晰。摆扫机构系统的精度和稳定性满足设计要求。
6 结论
这里研究的摆扫机构系统主要组件不会与无人机发生共振;在高温和低温的工作环境下摆扫机构系统工作稳定,相机拍照正常,摆扫机构系统的控制精度满足设计要求;用飞行模拟转台模拟飞行位姿变化时,宽幅摆扫相机单条轨迹角速度均方根值为0.8°/s,整个测试时间的角速度均方根值为1.2°/s,小于设计角速度精度1.35°/s;用跑车试验模拟高速运动环境时,摆扫机构系统工作稳定,相机成像完整质量清晰。因此,能够保证无人机航摄仪在高速飞行时拍照的精度及稳定性。
