公交投币机纸币模块结构与控制系统设计
2022-07-27黄嘉兴戚义鹏朱云鹏
黄嘉兴,黄 希,戚义鹏,朱云鹏
(南通大学机械工程学院,江苏 南通 226019)
1 引言
随着人们环保意识的增强和公共交通服务的完善,越来越多的人选择乘坐公交、地铁等公共交通方式出行。我国现阶段使用的公交投币机功能单一,多数不能自动找零,乘客必须自备零钱,人们常常会因没有足够零钱乘车而困扰。由于公交车费的特殊性,小面额纸币流通不畅,全国的公交公司不同程度存在零钱票款积压问题。此外,由于投币机不具备纸币清分计数功能,公交公司只能通过人工清点的方式,进行纸币和硬币的分离整理、分类计数等工作,因而工作效率低下且人力成本较高[1]。我国在部分省市推行1元硬币化试点,但我国北方大部分地区仍以纸币支付为主。另外,网络支付虽逐渐普及,但农村地区尤其老人和儿童这部分群体仍大部分采用现金支付的方式。随着我国镇村公交不断完善和老龄化的加剧,公交投币机纸币模块的设计研究现阶段仍具有现实意义。国内对纸币的清分、找零技术研究较少,能运用于现实生产生活中的更是寥寥无几。一些火车站、地铁站出现的自助售票机引进了国外的纸币接收处理模块,我国不具有自主产权。由于使用环境不同,国外的纸币接收处理技术也难以适用于公交投币机[2]。
为改变这一现状,结合公交投币机实际使用环境,这里设计了一种新型纸币处理模块。该模块不仅可以实现纸币的自动清分存储,而且具有快速循环找零功能。
2 纸币处理方案与传输单元设计
2.1 快速找零方案设计
实际使用中,投币机的找零时间不能过长,否则会影响后续乘客上车,进而增加公交停车等待时间。为提高找零速度,新型纸币处理模块采用纸币进钞系统与找零出钞系统分开且同时工作模式。
该纸币处理模块由检测单元、传输单元、清分存储单元、找零单元和控制系统组成。纸币处理系统的整体结构示意图,如图1所示。纸币从进钞口被投入,由传送带输送到检测单元。检测单元检测纸币真伪。如检测到纸币为假币,传送带倒转,退出纸币;检测为真币后,检测系统再识别纸币面值。面值识别结束,纸币经传送带传送进入传输单元。与此同时,控制系统计算找零钱数,确定找零方案,控制找零单元工作,使相应面值、数量的纸币从出钞口输出,实现找零。
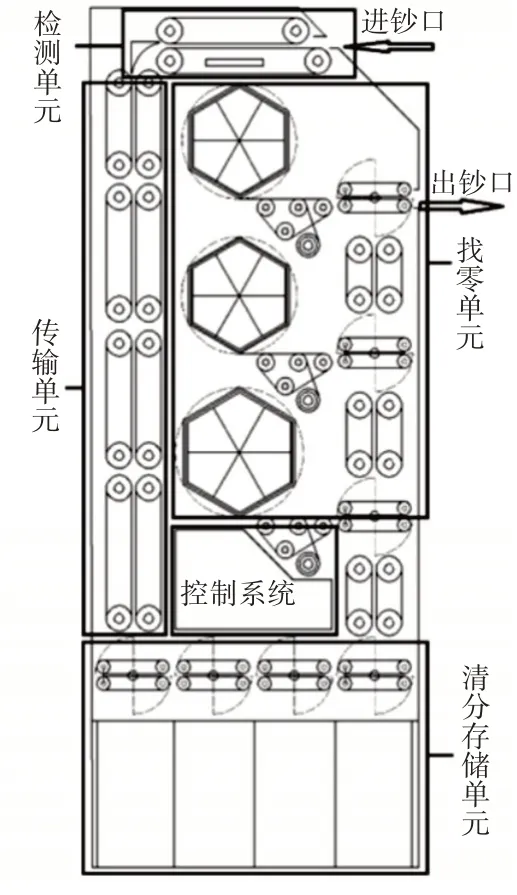
图1 整体结构示意图Fig.1 Schematic Diagram of the Overall Structure
乘客新投入的纸币经传送单元,由转向传送带到达清分单元。如果检测到找零单元中与新投入纸币面值对应的找零纸币存储筒未满,则由传送带将新投入的纸币传送进入找零单元,存入相应面值的存储筒中。如果检测到对应面值的找零存储筒已满,新投入纸币则由转向传送带传送进入下方对应的存储箱中。纸币处理方案流程图,如图2所示。
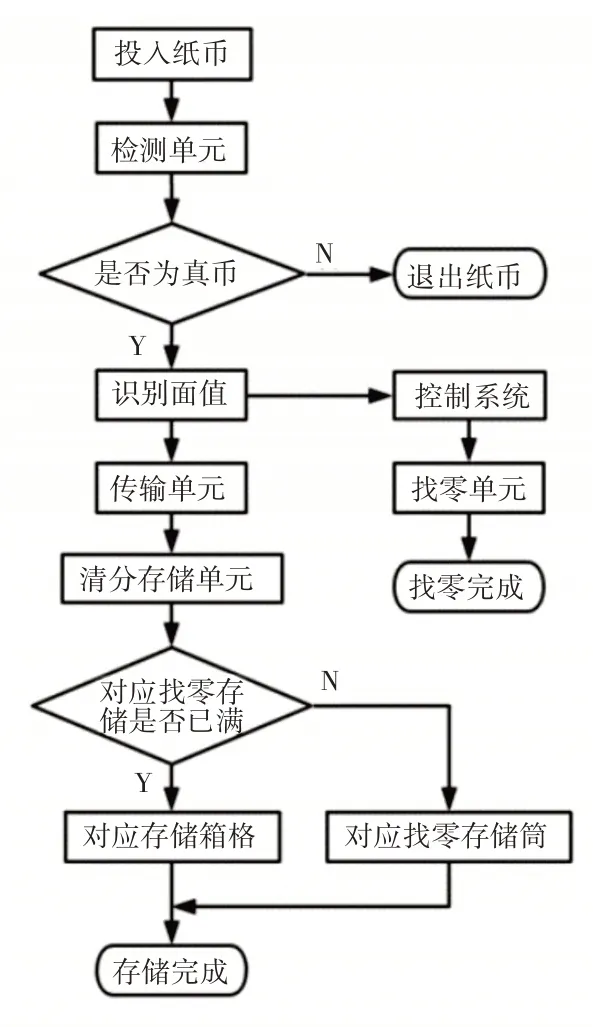
图2 纸币处理方案流程图Fig.2 Flow Chart of Banknote Processing Plan
2.2 传输单元设计
传输单元整体结构简单,主要由多组传送带组成,起到对纸币的传输作用。纸币传输通常采用两排滚轮与皮筋或扁平皮带夹持纸币的方式。这里通过比较皮筋和扁平皮带这两种传输方式的优缺点,最终选取多组平行扁平皮带的传输方式。纸币传输结构示意图,如图3所示。传输结构主要由2个驱动带轮、2个从动带轮及扁平皮带组成。相较于皮筋,扁平皮带宽大柔软,摩擦力更大,不易发生卡币和纸币滑落的现象,传输更可靠。采用平行扁平皮带的方式在传输过程中还起到对纸币压平整理的作用[2]。
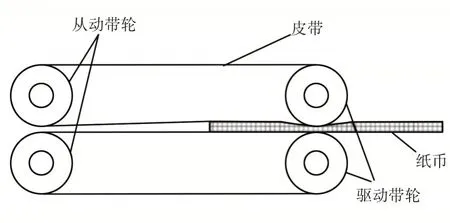
图3 纸币传输结构示意图Fig.3 Schematic Diagram of Banknote Transfer Structure
3 纸币清分存储单元设计
为解决公交公司依靠人工清点票款问题,降低人工成本,设计的纸币模块具有纸币自动清分、计数存储等功能。国内外对纸币清分研究较多,方法也多种多样。这里设计了一种可转向的传送带,通过传送带旋转改变方向,实现纸币清分存储工作。
3.1 清分存储方案设计
清分存储单元结构示意图,如图4所示,由四个转向传送带和纸币存储箱组成,存储箱分为4格,分别用于存放20元、10元、5元、1元纸币。4个储存箱格入口处分别安装1个红外传感器用于感应计数。当乘客新投入的纸币从传输单元输出时,1号转向传送带整体顺时针旋转90°至垂直状态(图4中2号转向传送带所示位置状态)接收纸币。如果为20元纸币,则直接输送入下方储存箱格中;如果为其他面值的纸币,且检测到找零单元对应储存筒已满,则1号转向传送带逆时针旋转90°呈水平状态(图4中所示的位置状态),向2、3、4号转向传送带传送纸币。转向传送带通过旋转改变状态,垂直状态时输送纸币进入对应的储币箱格中,平行状态时输送纸币进入下一转向传送带。2号、3号、4号转向传送带分别对应控制10元、5元、1元纸币。其中4号转向传送带还起到将纸币输送到找零单元的作用。纸币进入对应箱格时,红外传感器检测到纸币进入,控制器累加计数,从而实现票款的实时统计。

图4 清分存储单元结构示意图Fig.4 Schematic Diagram of Clear Storage Unit Structure
3.2 转向传送带结构设计
转向传送带由1个舵机、2个步进电机、4个带轮(2个驱动带轮,2个随动带轮)、固定架和传送带组成。转向传送带三维结构简图,如图5所示。两个步进电机分别驱动带轮及传送带转动,实现对纸币的传送。通过舵机旋转固定角度来改变传送带方向位置状态,以此来改变纸币下一步被传送位置。固定架起到电机与传送带轮部分的联接固定作用。固定架有两根长轴,用于带轮的配合定位安装。带轮与传送带部分与前文论述的传输结构相似。转向传送带在整个纸币模块中多处使用,比如找零单元和各单元之间的过渡部分。该装置是这里设计的纸币模块中重要的部件。
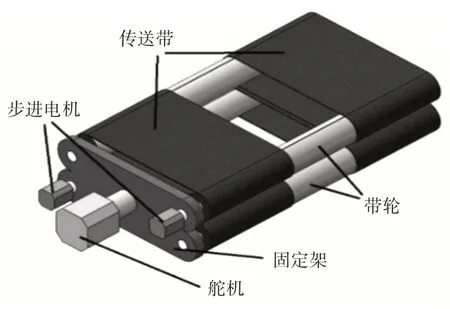
图5 转向传送带三维结构简图Fig.5 Schematic Diagram of the Three-Dimensional Structure of the Steering Conveyor
4 循环找零单元设计
以往一些具备纸币找零功能的设备通常是找零模块与接收模块相互独立,采用预先填装一定数量的找零备用纸币的形式,因而流通效率较低。为提高小面额纸币的流通效率,缓解零钱在投币机中积压问题。新设计的纸币模块具有纸币循环找零功能。所谓循环找零,就是将乘客新投入的零钱纸币重新补充到找零备用纸币中用于再次找零。
4.1 循环找零方案设计
找零单元整体结构示意图,如图6所示。找零单元由找零机构及转向传送带组成,三个机构分别负责1元、5元、10元这三种面值纸币的找零。当控制系统确定找零方案后,找零模块开始工作。相应面值的六边形找零存储筒逆时针旋转相应角度,卷轴旋转收集释放出的多余卷膜。被释放出纸币,经输送装置、转向输送带送达出钞口,实现找零。
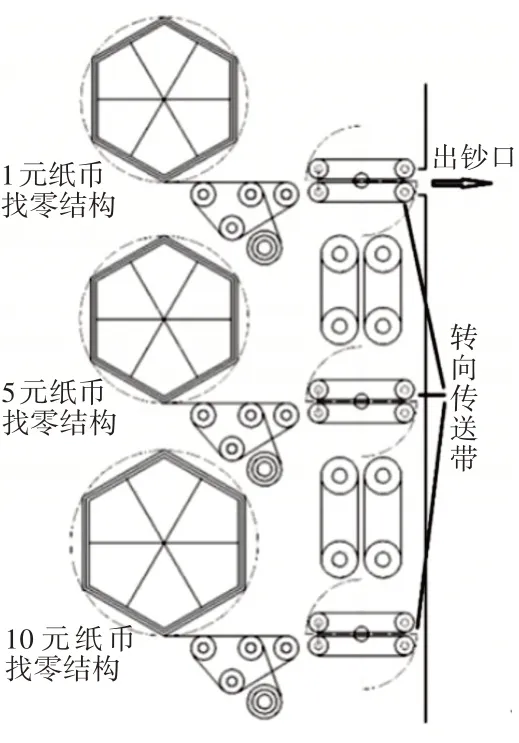
图6 找零单元整体结构示意图Fig.6 Schematic Diagram of the Overall Structure of the Change Unit
纸币回存过程找零单元动作与找零过程相反。乘客新投入纸币后,通过超声波传感器检测存储筒表面的卷膜厚度来判断存储筒是否已满。当检测对应面值的存储筒未满,新投入的纸币经传送单元和(1~4)号转向传送带,4号转向传送带逆时针旋转90°,将纸币输送到找零单元,找零单元中相应面值的转向传送带旋转至水平状态将纸币输送到六边形存储筒下方预定位置,随着六边形存储筒顺时针旋转,卷轴释放的卷膜夹着纸币将其卷存入对应存储筒,实现纸币回存,以备下次找零使用。
4.2 找零装置结构设计
取出具体数量纸币的方式有多种,使用较多的是采用捻轮抽取或吸盘吸取的方式,但这两种方式结构比较复杂,对纸币质量要求也较高[3]。采用卷膜将纸币卷存于滚筒表面的方式,降低了对纸币质量的要求,存取一定张数的纸币也相对容易实现。找零结构由六边形存储筒、卷膜、卷轴、换向轮和传送装置组成。找零机构三维结构简图,如图7 所示。采用卷膜中间内嵌传送带方式,可以在节省空间的同时,保证纸币能够到达预定位置,从而避免纸币在卷存于六边形滚筒时因错位而造成的纸币折损。六边形滚筒的设计,在满足存储最大数量和尺寸要求的同时,还起到对纸币进行平整的作用[4]。卷轴由步进电机驱动,与六边形找零存储筒配合旋转,进行卷膜地收集与释放,保证卷膜始终处于绷直状态。卷膜使用塑料薄膜材料制成,厚度小,强度高,寿命长,可以满足对纸币的夹持、裹挟需要。

图7 找零机构三维结构简图Fig.7 Schematic Diagram of the Three-Dimensional Structure of the Change Mechanism
该结构设计在实现纸币找零方面相较于其他方式,具有结构简单、技术要求低、可靠性高等特点。
5 控制系统与检测单元设计
5.1 硬件部分
这里设计的纸币处理模块采用Arduino Mega 2560微型控制器作为样机控制核心,结合电机驱动模块、TCS34725颜色传感器模块、磁敏传感器模块、超声波传感器模块和红外计数传感器模块等组成整个控制系统。通过控制电机驱动模块驱动步进电机转动及其转向,使找零存储筒、传送带轮和卷轴旋转工作。系统结构框图,如图8所示。

图8 系统结构框图Fig.8 System Block Diagram
5.1.1 Arduino控制器
Arduino Mega 2560 控制器的处理器核心是ATMega2560 芯片,如图9所示。相较于其他型号的Arduino控制器,它提供了更多的I/O接口和更大的运算储存空间。它具有54个数字I/O接口和16个模拟输入口,完全可以满足纸币处理装置的使用需求[5]。
图9 Arduino Mega 2560Fig.9 Arduino Mega 2560
5.1.2 磁敏传感器
我国的纸币防伪技术和真伪识别技术不断成熟。常用的纸币真伪识别技术有紫外线识别技术、磁性识别技术、弱磁编码识别技术、红外线识别技术和激光识别技术等。这里采用隧道磁电阻(Tunnel Magneto Resistance,TMR)采集纸币安全线及冠字码的磁信号来进行纸币真伪识别。TMR磁性识别传感器是针对纸币磁信号检测与识别研发的新型纯阻抗验钞磁头,采用偏置磁钢凹陷设计结构,具有高灵敏度与高信噪比的特点。TMR传感器采集磁信号数据经小波降噪处理后,控制器分割提取中段有效信号,并提取有效信号波形的能量、均方差、峰值等特征。根据不同特征指标,分析磁信号分布规律,从而判断纸币的真伪[6-7]。
5.1.3 颜色传感器
TCS34725 颜色传感器,如图10 所示。可以采集红、绿、蓝(RGB)以及明光感应的数字返回值。因为不同面值的纸币存在明显颜色差异,采用TCS34725颜色传感器模块采集纸币的RGB数据值,使用ATMega2560芯片进行8G-4R-4B二值化RGB数值处理以及RGB 到HSV(Hue色调,Saturation 饱和度,Value 亮度)颜色空间的转化。利用纸币图像H分量的前三阶颜色矩作为分类特征,分析得到不同面值纸币之间的数据特征区别,从而实现纸币的面值识别[8-9]。

图10 颜色传感器Fig.10 Color Sensor
5.1.4 红外传感器
红外传感器,如图11所示。该传感器以对射感应方式,有常开与常闭两种模式。常开时,有遮挡物时输出5V电压,无遮挡物时输出0V电压,常闭时则相反。利用这一特性,控制器通过接收纸币瞬时通过传感器产生的电压脉冲实现计数功能。该传感器的感应距离为(0~30)cm,响应时间为2ms,可以满足实际感应计数需要。

图11 红外传感器Fig.11 Infrared Sensor
5.2 软件部分
系统利用Arduino IDE开发环境进行程序设计。该开发环境运用C语言进行编写,主要参数功能已函数化、模块化,模块的功能实现较为方便。该装置的程序系统主要由主程序、找零子程序、循环存储子程序、传感器检测子程序以及电机调速控制子程序等组成。系统主程序流程图,如图12所示。
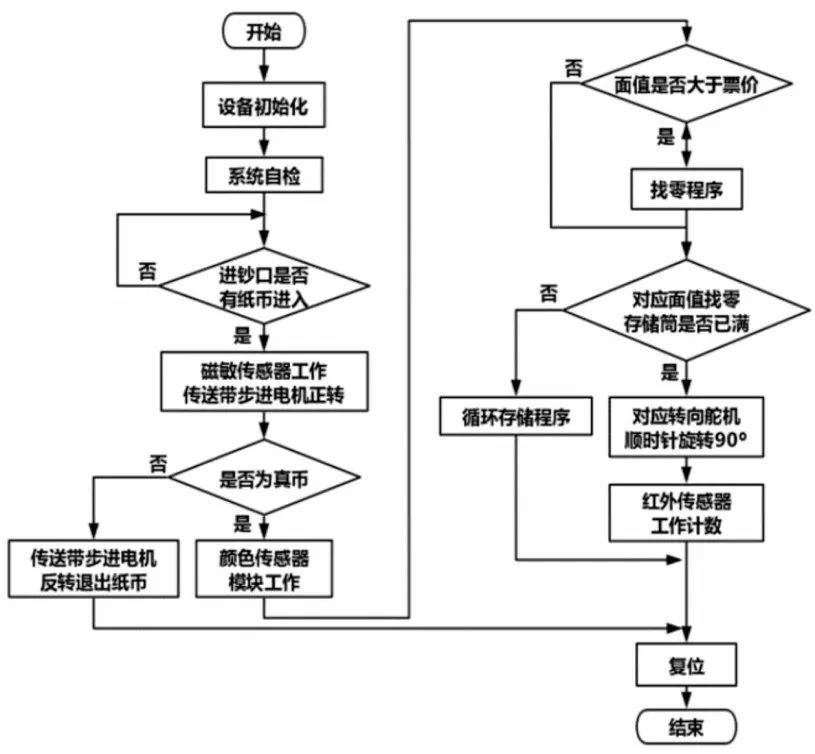
图12 系统主程序流程图Fig.12 System Main Program Flow Chart
找零算法程序流程图,如图13所示。通过对需要找零钱数进行整除和取余操作,结合对应面值剩余备用找零钱数,实现对找零方案的确定。该方案可满足投入纸币最高面值20元投入纸币的找零工作。最终根据程序输出值,控制相应六边形存储筒驱动步进电机旋转一定角度,释放出所需张数的相应面值纸币。步进电机旋转角度公式如下:

图13 找零程序算法流程图Fig.13 Flow Chart of the Change Program Algorithm
10元找零桶步进电机旋转角度:

5元找零桶步进电机旋转角度:

1元找零桶步进电机旋转角度:

5.3 步进电机控制及模拟分析
通过脉冲宽度调制(Pulse Width Modulation,PWM)来控制步进电机旋转一定角度,从而控制转向传送带的预定旋转角度。Arduino Mega 2560处理器有16个数字接口可作为PWM输出,通过程序编写,利用这些接口产生不同占空比的方波,模拟产生PWM信号进行实现舵机不同角度的控制。
步进电机控制框图,如图14所示。

图14 步进电机控制框图Fig.14 Stepper Motor Control Block Diagram
Arduino单片机为比例环节G0=K0,电机驱动模块与步进电机传递函数为:

角位移传感器为比例环节G2=K1。则系统传递函数为:

式中:T=0.2,K0=427,K1=0.014。
根据系统框图,利用MATLAB/SIMULINK 对系统进行动态仿真分析。系统阶跃响应仿真曲线,如图15所示。
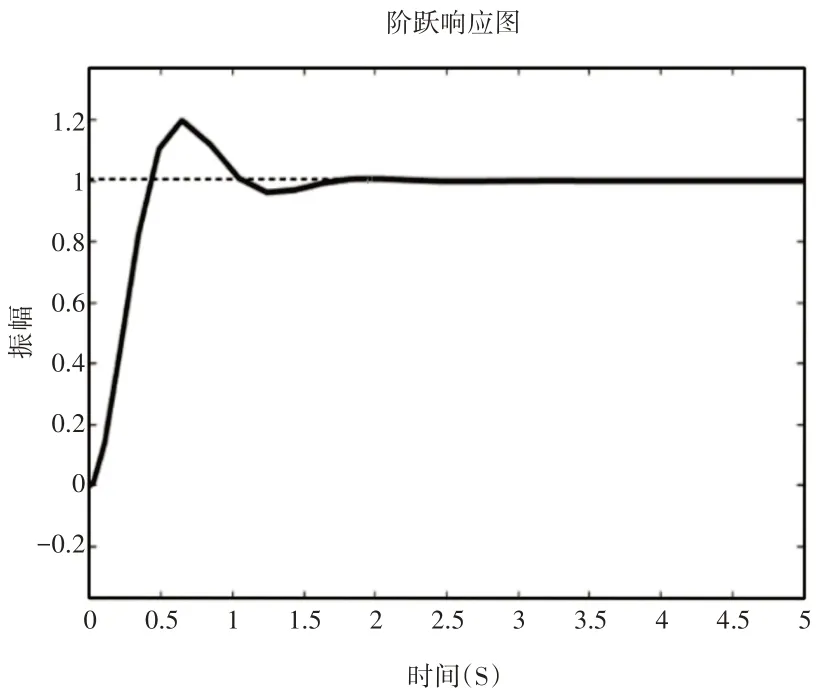
图15 系统阶跃响应仿真曲线Fig.15 System Step Response Simulation Curve
可以看出,其稳态误差小于2%,超调量在18%左右,响应时间在1s左右,系统快速性、稳态性良好[10]。
6 结束语
这里设计的新型公交投币机纸币模块,旨在解决目前公交投币机功能单一,不能对纸币进行自动清分和循环找零的问题。该纸币模块具有纸币的识别清分、计数存储及循环找零功能。
(1)纸币自动清分方面,纸币模块能够快速地实现20元、10元、5元、1元四种面值纸币的识别清分、计数存储功能。存储箱可以存储(800~1200)张纸币,并方便取出和安装。
(2)循环找零方面,该结构方案可实现10元、5元、1元三种面值纸币的循环找零功能,并存取纸币时降低了对纸币质量的要求。
通过实验机和软件模拟验证了该模块方案的可行性和精巧性。在后续的研发中,可增加如:硬币处理、网络支付、显示播报等功能,在可靠性、节能降耗等方面优化改进,使之应用于实际生活中。
