下肢康复训练机器人的控制系统设计
2022-07-27尚会超付晓莉
李 勇,冀 涛,尚会超,付晓莉
(中原工学院机电学院,河南 郑州 451191)
1 前言
近年来,由于人口老龄化,交通事故,自然灾害等原因导致脊椎损伤的患者逐年增加。下肢残障患者也在逐年递增。他们需要有相应的肢体康复训练,以帮助他们有效的恢复肢体运动能力,以满足日常生活需要。因此康复设备的研发日益重要。
康复机器人是穿戴于患者肢体上,并且可以模拟人肢体运动形式,辅助有运动障碍的患者进行康复训练的康复辅具。传统康复大多结构繁杂,智能化成不高,康复训练效率低下等[1]。
为此许多专家学者做了深入的研究。文献[2]针对一种上肢机器人进行运动分析,设计基于模糊PID的控制系统。文献[3]针对一种坐卧式的下肢康复机器人,设计了基于计算力矩的神经网络控制。
文献[4]提出一种适应个体差异的步态规划方案。文献[5]针对上肢康复机器人提出一种关节力矩反馈的设计方案。文献[6]设计出模糊主从的控制方法。
下肢康复训练机器人是直接穿戴于人体身上,在人机运动及步态协调方面尤为重要。依据康复评定学中的RLA步态分期原理和CGA临床数据,对下肢康复训练机器人进行步态规划。设计PID控制系统,并且考虑到人机运动协调方面的问题,设计一种位置阻抗控制器。然后搭建样机控制平台,进行实验验证。
2 运动分析及轨迹规划
目前下肢康复训练机器人种类较多,有外骨骼式,悬吊式,坐卧式等。按照关节运动可分为单关节和多关节,其中多关节包括髋-膝,膝-踝,髋-膝-踝。设计一种支架式的多关节下肢康复训练机器人[7]。
建立三维模型,如图1所示。

图1 三维机构模型及人机配合图Fig.1 3D Mechanical Model and Human-Machine Coordination Diagram
在人体下肢运动中,在人体下肢中髋关节处是典型的球窝结构,膝关节处滑膜铰链结构。其中人体下肢矢状面的运动为主要运动。在髋关节处和膝关节各有一套电机驱动系统,用于驱动下肢支臂运动。下肢康复训练机器人的整体结构参考人机工程学标准,大腿支臂和小腿支臂的尺寸参照国家标准GB10000-88《中国成年人人体尺寸》[8]。
2.1 运动学求解
构建运动学模型,将大腿支臂,小腿支臂和整体机构模型简化为平面连杆机构。在人体下肢步态运动中,两条腿运动相互协调,所以从单条腿进行分析。如图2 所示,以髋关节为原点O(0,0),建立坐标系。

图2 运动坐标图Fig.2 Motion Map
l1表示大腿段的长度,l2表示小腿段的长度,D1表示大腿段的质点,D2表示小腿段的质点,k1为大腿段的末端端点,k2为小腿段的末端端点。式(1)为连杆i相对于i-1坐标系的位姿变换矩阵。
将各段参数带入式(1),求得各相邻支臂坐标间的位姿变换矩阵。

将各支臂之间的位姿变换矩阵连乘。

式(6)各个支臂变换矩阵整理后得出末端相对坐标的位姿变换矩阵。

通过整理后的末端位姿变换矩阵,可以得出末端位姿k点相对于坐标系的位置坐标k=(xk,yk)。

通过对式(7)求导,可得出k点速度变化函数。

下肢康复训练机器人运动学反解:
定义角度∂。

已知k点位置坐标和∂角度,得出p点位置坐标p(xp,yp)。

依据余弦定理可得:

xp,yp和l2的关系,以及θ2和l1之间的关系可以通过式(11)解出。

2.2 运动轨迹规划
为了能更加贴近正常人体下肢步态的运动情况,下肢康复训练机器人的运动轨迹规划依据RLA人体下肢步态原理和CGA临床步态数据。RLA步态分期,是由美国加利福尼亚州的国家康复中心结合了正常人体步行周期和各时相发生过程,将人体步行动作划分为8个阶段,分别为支撑前期,支撑初期,支撑中期,支撑末期和摆动前期,摆动初期,摆动中期,摆动末期[9]。并且对每个时期的运动状态进行描述,如表1所示。

表1 RLA关节分期描述Tab.1 Description of RLA Joint Stages
CGA 临床步态数据是通过人体运动录像获得,其中提供了人体步行运动状态中关节运动角度,关节力矩等信息。周期内膝关节角度数据,如图3所示。周期内髋关节角度数据,如图4所示。
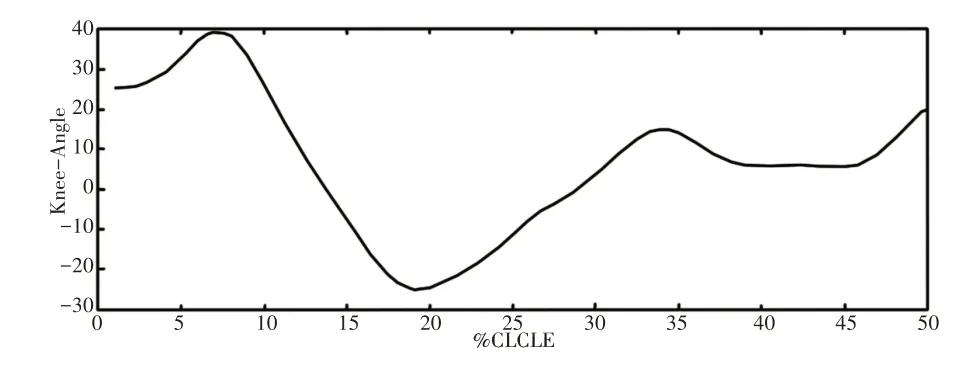
图3 CGA膝关节周期角度变化曲线Fig.3 Periodic Angle Curve of CGA Knee Joint

图4 CGA髋关节周期角度变化曲线Fig.4 Periodic Angle Curve of CGA Hip Joint
依照RLA将人体下肢步态划分为8个时期,提取其特征,对CGA数据中周期的数据进行时期划分。因为只有关节角度的运动数据,所以依照运动学模型的推导,可得出腿部支臂端点坐标表达式。将关节角度的运动数据导入Matlab,并且带入式(7)可得矢状面内大腿端点和小腿端点的运动坐标变化。大腿端点的X轴和Y轴坐标,如图5所示。小腿端点的X轴和Y轴坐标,如图6所示。

图5 髋关节X轴和Y轴位置变化曲线Fig.5 X-Axis and Y-Axis Position Curves of the Hip Joint

图6 膝关节X轴和Y轴位置变化曲线Fig.6 X-Axis and Y-Axis Position Curves of Knee Joint
3 控制系统设计
3.1 PID位置控制策略
PID控制器一直是工业中应用最多的控制算法,其具有控制参数少,容易实现等优点。采用PID位置控制电机,如图7所示。在康复训练过程中,患者依据规划好的运动轨迹进行运动康复训练。通过PID位置控制器对各个电机进行控制,从而达到对下肢康复机器人大腿段和小腿段末端端点位置的精确控制。

图7 PID位置控制架构Fig.7 PID Position Control Architecture
下肢康复机器人在髋关节和膝关节处均有电机驱动装置,通过Simulink建立下肢康复机器人的运动仿真模型,如图8所示。基于PID髋关节和膝关节的位置控制,如图9所示。其中以髋关节为例的电机参数,Ra=0.7Ω,La=0.00007H,Kt=0.00361Nm/A,Ke=0.0038V/rpm,f=0.0001。
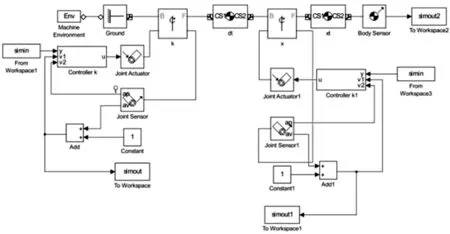
图8 下肢康复机器人PID位置控制模型Fig.8 PID Position Control Model of Lower Limb Rehabilitation Robot
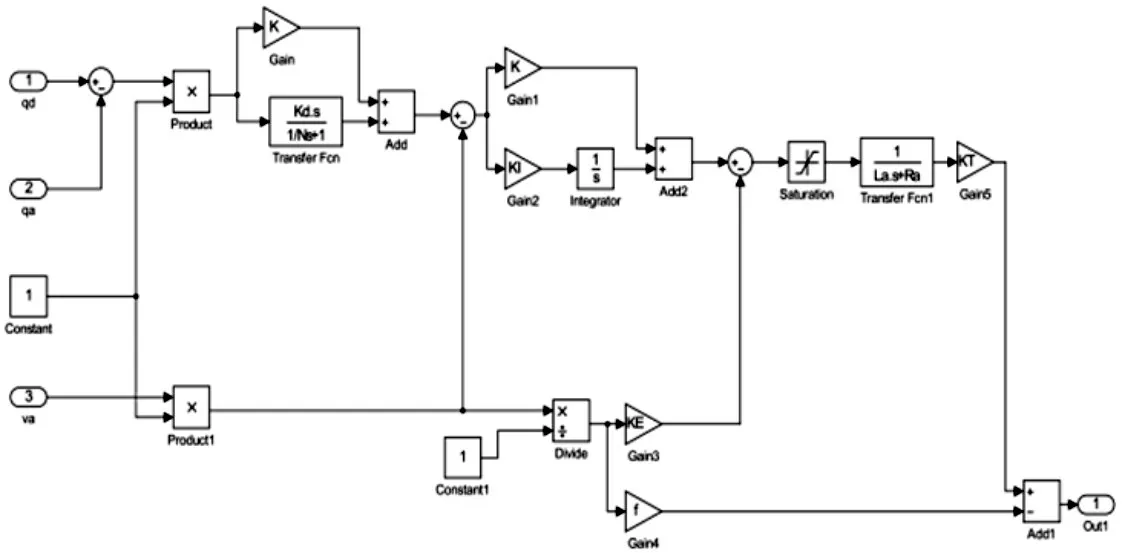
图9 下肢康复机器人PID位置控制器Fig.9 Lower Limb Rehabilitation Robot PID Position Controller
在Matlab的Simulink模块中搭建仿真平台,通过仿真模拟验证PID控制,模拟脉冲信号,所以以方波信号作为输入信号。
此时比例系数为0.89,积分系数为1.98。可以看出控制器能够在无超调的情况下进行快速的响,如图10所示。
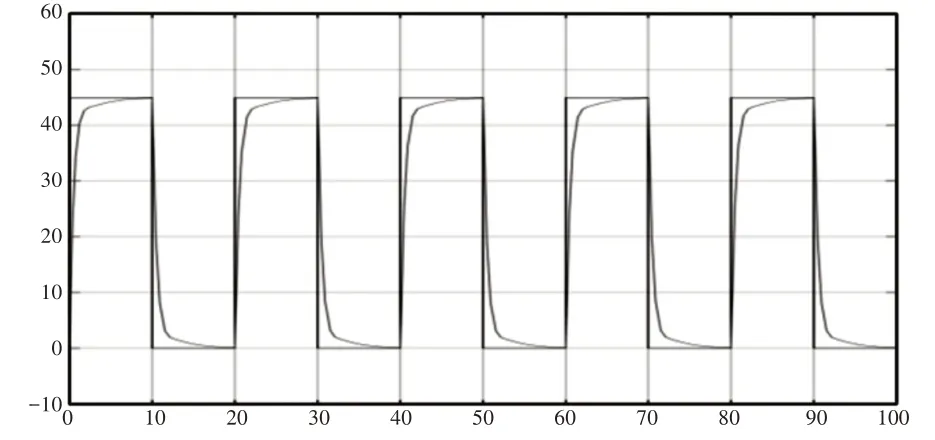
图10 控制器仿真测试Fig.10 Controller Simulation Test
3.2 位置阻抗控制策略
在康复训练的过程中,患者和训练设备之间不可避免的会有相互作用力。如果人机之间的相互作用控制不好,不仅仅会影响康复训练的效果,严重的情况可能会对患者造成二次伤害。所以,提出使用基于位置阻抗的控制策略。
通过位置阻抗控制策略反馈出位置的修正量,并且将参考位置,位置修正量和实际运动位置带入到控制器中,从而达到跟踪目标位置和人机相互作用力的控制。
建立下肢康复训练机器人中的阻抗控制模型,其中F为人机接触力的变化量,Fd参考接触力,Fc实际运动中接触力。
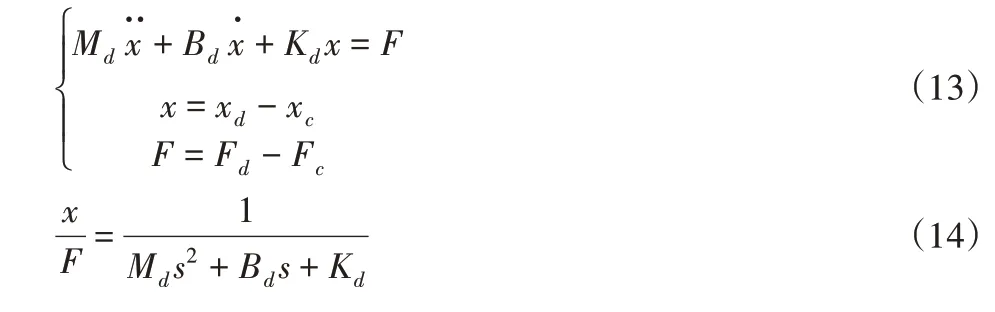
将式(14)简化,其中,m—惯性参数;b—阻尼参数;k—刚度参数。

式中:ωn—自然频率;ℓ—阻尼比。

引入控制量。

通过引入PD偏置控制后下肢康复训练机器人的阻抗控制模型的跟踪,可表示为:

构建位置阻抗控制系统框图,如图11所示。

图11 位置阻抗控制框图Fig.11 Block Diagram of Position Impedance Control
4 样机及系统平台搭建
为实现功能需求,硬件电路的PCB 板应该包含芯片运行的最小系统,伺服驱动器的通讯接口,上位机的通讯接口,如图12所示。
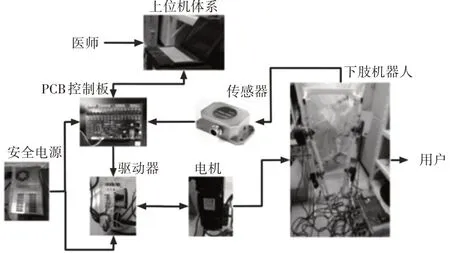
图12 系统平台Fig.12 System Platform
最小系统包括复位电路,供电电路,下载和调试电路和晶振电路。STM32是低电平复位,采用按键复位形式。
供电电路采用AMS1117芯片,该芯片为正向低压压差稳定器,其在内部集成过热保护和限流电路,可以输出1.5V,3.3V 等多种电压。
主频使用8MHz晶振,以此来方便倍频。时钟RTC频率使用32kHz,方便在经过15次分频后达到1Hz的频率。主控芯片和上位机之间通过RS232进行通讯。RS232通常有9引脚和25引脚两种。其在逻辑1时电位在(-3~-5)V。在逻辑0时电位在(+3~+5)V。
主控芯片和伺服驱动器之间的通讯,需要参照伺服驱动器接口的定义。
伺服驱动器选用的是SDD08NK8 系列,220V 和800W 输出功率,最大输出电流9.1A,1:5000调速范围。
系统传感器使用HCA520T电压型双轴倾角传感器,该原件测量范围是(±1~±90)°,输入电压为(9~36)V,输出电压为(0~5)V,分辨率可达0.001。
传感器的输入电压值为(0~5)V,所以需要使用差分电路把电压值控制在(0~3.3)V之内。
通过以上硬件设计中的RS232接口实现,PCB板和上位机之间的通讯。芯片通过串口向上位机发送实时数据。定义数据帧的帧头为ACCA,帧尾为BDDB,波特率位9600,中间数据域为传感器采集的数据。
定义人体直立状态下的各关节角度为0,芯片发送为16进制数据,在上位机中转化为10进制,通过数值能精确读出当前关节角度位置,通过图标直观的反映出角度和时间的变化关系。
5 实验验证
5.1 步态速度检测实验
根据康复评定学中对人体下肢步态的描述,人体正常步频约为(95~125)steps/min之间。正常步态周期为(1~1.32)s之间。
如果下肢康复训练机器人的运动速度过快,则会造成患者不适[10]。所以验证支臂的最快步行运动速度是否在人体步态速度范围内是非常有必要的。
通过测量关节处的角速度可以推出支臂运动速度,如图13所示。

图13 样机测试Fig.13 The Prototype Test
在康复评定学中描述,人体正常步态周期为(1~1.32)s之间。并且通过髋对关节运动的描述,可以得出步态周期内的平均速度区间(77.6~100)°/s,最大瞬时速度区间在(238~256)°/s。
以单侧腿的髋关节为例,测试一中的步态周期内髋关节角速度变化,电机输出轴经过减速器后带动支臂最大其最大不超过256°/s,平均角速度速度83.36°/s在可接收范围内,且步态周期的时间在(1100~1200)s之间,符合康复评定学中描述的正常人体步态,如图14所示。

表2 角速度测试表Tab.2 Angular Velocity Meter

图14 髋关节周期角速度变化曲线Fig.14 Curve of Periodic Angular Velocity of Hip Joint
5.2 控制策略检测实验
对控制系统进行轨迹跟踪的检测实验,以髋关节为例,通过采集髋关节位置处的角度,可以分别计算出大腿支臂末端端点的X轴和Y轴位置坐标。
然后和通过规划后的轨迹坐标相对比,如图15所示。可以观察到跟踪曲线和规划曲线特征大致相吻合。但是对于曲线跟踪状态需要判断轨迹跟踪的误差情况。
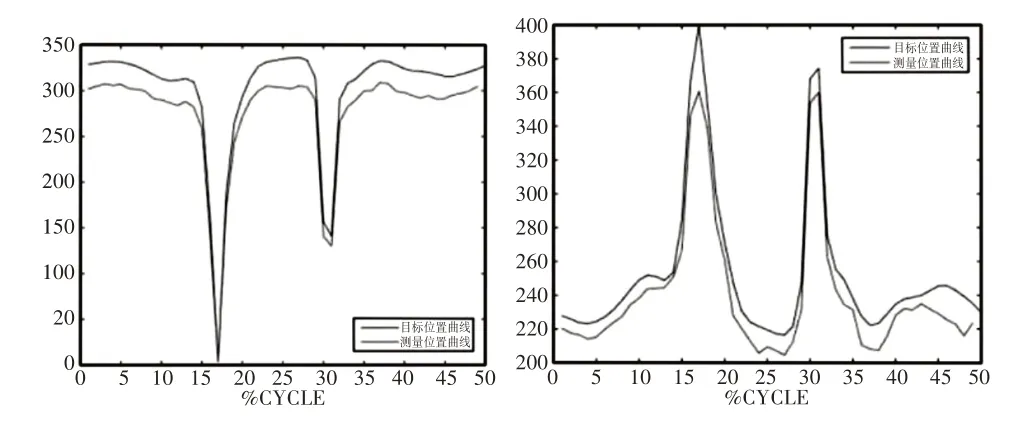
图15 髋关节X轴和Y轴位置跟踪测试Fig.15 Hip X Axis and Y Axis Position Tracking Test
将髋关节的X轴,Y轴规划曲线的数据和采集的数据导入Matlab中,分别进行误差分析。
如图16 所示,髋关节X轴和Y轴的相对误差分布情况均在0.11之内,且总体趋势没有太大数值范围的变化,可见系统具有相对良好的性能。对图中误差分布情况进行分析,在X轴的前半段区间内有较大的误差变化情况,同样在Y的前半段有较大的误差变化情况。
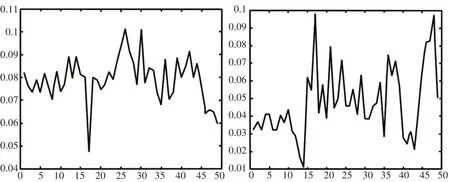
图16 髋关节X轴和Y轴误差分布图Fig.16 The X-and Y-Axis Error Distribution of the Hip Joint
结合图15可以看出相对应的是位置变化较大的地方,运动位置的剧烈变化会导致误差的相对增加。
另外误差存在的原因可能是:
(1)机械系统装配的固有误差。
(2)硬件电路部分有一定损耗。
(3)电源供电不稳。
6 总结
这里对一种支架式的被动康复训练机器人进行研究,设计其控制系统并验证。
依据实际运动形式建立运动学模型,并且对下肢康复训练机器人进行运动正解和反解推导。
依据康复评定学中RLA步态规划和CGA临床步态数据,建立坐标进行步态轨迹在人体矢状面X轴和Y轴规划。
使用基于PID位置控制的方法进行驱动控制设计,并且进行仿真模拟,检验PID位置控制器的可用性,以输出方波为实例,其结果显示通过PID位置控制器,能较好的模拟输出信号。
然后为了使系统具有一定的柔顺性,采用基于位置阻抗的控制设计,建立位置阻抗模型并且设计控制框图,以达到跟踪轨迹,提高人机运动协调性。
搭建包含样机,控制器,电机,上位机的控制系统平台,以医师为操作者,患者为使用者的控制系统。
最后进行步态速度验证和轨迹跟踪实验,依据康复评定学中对人体步态的描述,进行步态速度检测实验,实验检测结果周期内的平均角速度和最大角速度,在正常区间内,以此来保证用户的使用的安全性,避免运动中的二次伤害。
验证控制系统的轨迹跟踪情况,通过以髋关节为例,分别采集X轴和Y轴的数据和规划数据相比较,并且进行误差分析,分析结果相对误差均在0.11之内,以此确保控制系统具有较好的运动控制性能,然后列举误差存在的可能原因。
以下肢康复训练器为对象,结合康复评定学中的人体步态运动,设计控制系统,以此来满足医师和患者对下肢康复训练机器人的需求,相比传统的康复训练器,更加符合实际人体运动情况,提高康复训练效率。
