起重机平面度测定方法研究
2022-07-27李和平赵成立鲁恩顺赵章焰
李和平,赵成立,鲁恩顺,赵章焰
(武汉理工大学物流工程学院,湖北 武汉 430063)
1 引言
港口起重机作为港口物流的主要工具,为国际贸易带来极大便利。但在工作环境复杂、工作强度大,频率高的情况下。港口起重机的承力结构会发生不同程度的形变。这种情况不仅会缩短港口起重机的使用寿命,还会造成一定的安全问题。因此有必要通过有效的测量来评估安全性[1]。
现在用于测量大型机械平面度的方法主要有:三坐标测量机方法、CCD测量方法和百分表方法[2],三坐标测量机方法将受到使用环境及自身的限制:CCD测量法操作复杂、成本高;百分表方法的准确度存在不足。并且这些方式对于港口起重机有非常大的局限性,甚至完全不可行,实际的工程领域并不适用。
伴随计算机水平的发展以及学科之间的交叉越来越深入,对于起重机或与其代表的传统行业,应该寻找新的结合点。
近景摄影测量[3]经历过多个发展阶段之后,已逐渐成熟,近景摄影测量能够获得大量的点云数据,操作简单,成本低廉。摄影测量在当今工程领域当中愈来愈广泛,包括道路,桥梁,隧道[4]等方面。
另外得益于计算机视觉以及图像处理领域的技术发展,后期数据的处理也有了更高效的计算方式。因此在计算机的帮助下,数据的后期处理也变得十分快速,精准。利用近景摄影测量对二维像片进行处理即可完成对港口起重机待测平面点云数据的采集,获得相关点的空间位置。对于港口起重机平面度的测量,则可以利用摄影测量获得的平面的点云空间坐标,然后通过最小二乘法拟合得到相应的空间平面,计算出点到拟合平面的距离,完成平面度的测量。
2 建立近景摄影测量系统
2.1 构建摄影测量坐标系系统
在摄影测量中,为了得到待测物体的位置,形状,大小,首先要构建物体与像片之间的解析关系,这对于计算机后期处理步骤是十分重要的。坐标系系统为笛卡尔空间直角坐标系,如图1所示。图1(a)~图1(d)分别为像平面坐标系o′-xy,像空间坐标系S-xyz,像空间辅助坐标系S-XYZ,物方空间坐标系O-XPYPZP。各个坐标系之间的相对位置关系,如图2所示。各待测点的像平面坐标为观测值,通过计算机相关软件处理得到。依据各个坐标系间的相对位置关系,可以获得待测物方坐标系坐标。

图1 坐标系Fig.1 Coordinate System

图2 各坐标系相对位置Fig.2 Relative Positions of Each Coordinate System
2.2 后方交会
在摄影测量中,共线方程[5]是后方交会[6]的核心,物方点和像方点要一一对应,点的共线性是解算的基础。如图3 所示,S为投影中心,其物方空间坐标是(XS,YS,ZS),M是地面上任意一点,物方空间坐标(X,Y,Z),像空间辅助坐标为(Xm,Ym,Zm),像空间坐标为(x,y,-f),则可以得到像空间辅助坐标与物方坐标之间的关系式:

图3 后方交会示意图Fig.3 Schematic Diagram of the Resection

由图2可以看出,像空间坐标系绕投影中心S旋转,以得到像空间辅助坐标系,其关系式如下:

将式(1)代入式(2),得到了共线方程公式:

式中:x,y,-f—像点的像空间坐标;
f—像片焦距;
XS,YS,ZS—投影中心的物方空间坐标;
ai,bi,ci—由像片的旋转角组成的方向余弦值。
因为共线方程是非线性方程,所以需要使用泰勒公式展开成线性表达式,即线性化。
线性化后可以得到误差方程的一般形式为:

式(5)、式(6)中(x)(y)是用各待求值的近似值代入到式(3)与式(4)中求出的像点坐标近似值。
x,y为观测值,相应的改正数为vx,vy;X,Y,Z为控制点物方坐标,是已知的值;外方位元素XS,YS,ZS,φ,ω,κ为待定的参数,其相应的改正数分别是ΔXS,ΔYS,ΔZS,Δφ,Δω,Δκ。
由式(3)、式(4)可知,至少需要3个物方控制点才能解共线方程,求得待定参数,超过3个控制点可以进行平差处理。
2.3 前方交会
摄影测量的前方交会[7]过程需要用到后方交会所求得的6个外方位元素,是由立体像对的内,外方位元素和观测的像平面坐标共同来确定同名像点的物方坐标。由左,右像片的外方位元素φ1,ω1,κ1和φ2,ω2,κ2计算得到相应的正交矩阵R1,R2,求得任何一像点的像空间辅助坐标。如图4所示,左像片像点m1,右像片同名像点m2,和模型点M的像空间辅助坐标分别为(X1,Y1,Z1),(X2,Y2,Z2),(NX1,NY1,NZ1)或(N′X2,N′Y2,N′Z2),N,N′分别为左右片同名像点的投影系数。它们之间的关系式为:

图4 前方交会示意图Fig.4 Schematic Diagram of Forward Intersection

投影系数由式(7)、式(9)求得:

BX,BY,BZ用左,右像片的外方位元素来计算,则:

联立式(10)~式(14)可得投影系数N,N′。
任意一点的物方坐标初值可通过以下公式获得:

对于空间前方交会的情况,内外方位元素已知,地面点坐标初值已经求得,因此每张像片列出误差方程为:
3 平面度测定的最小二乘法分析
3.1 确定平面度测定方法
平面度误差[8]是指测量的实际表面相对其参考平面的变动量。通过将待测实际表面与参考表面进行比较来评估平面度,而通过数据处理拟合出的参考平面和实际表面的相对位置关系,将决定平面度的最后评定结果。
平面度误差的评定主要方法有:最小包容区域法、最小二乘法、对角线平面法以及三远点平面法。其中最小二乘法[9]是利用所有的点云坐标数据拟合出一个理想的参考平面,因此该方法能够在数学理论的支撑下比较客观,准确地反映待测表面平面度的大小。
参考平面上下两侧的数据点与该参考平面之间的最大偏离值之和,即为待测表面平面度的大小。平面D是由最小二乘法拟合出的参考面,Δd为拟合的参考面D两侧偏离值的最大值之和,如图5所示。

图5 平面度测定示意图Fig.5 Flatness Measurement Diagram
3.2 建立最小二乘法数学分析模型
在建立的空间直角坐标系中,平面方程的数学表达式为:

如图6所示,平面内有n个离散点,坐标为(Xi,Yi,Z)i,i=1……n,用矩阵表示为:
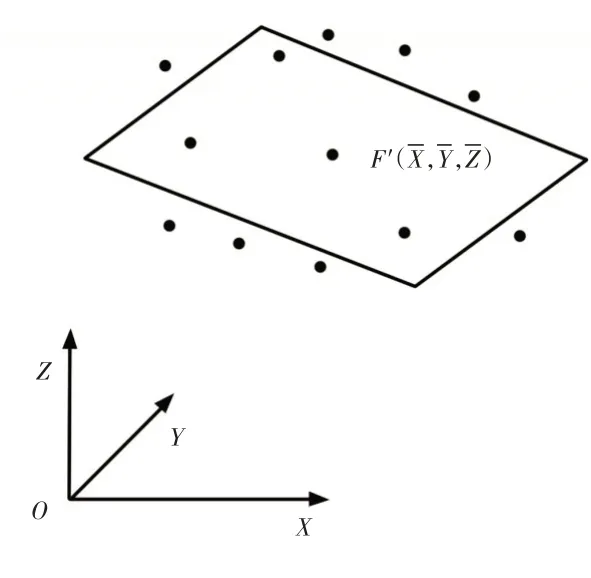
图6 拟合平面示意图Fig.6 Schematic Diagram of Fitting Plane


对矩阵F′进行奇异值分解:

由矩阵V可以得到拟合平面的法向量,又由该拟合面必定经过众离散点的平均值坐标。
所以可以得到该拟合平面的方程表达式:

点到平面的公式为:

式(27)所表示的平面方程代表的是一个拟合平面,反映的是点云的平面趋势,点云分布在拟合平面的两侧。
上下两侧都有一点到该拟合平面的距离是最大的,该拟合平面上下两侧最大距离之和即为所求的平面度。
4 实验
4.1 实验流程
试验采用佳能5DS单反数码相机,分辨率(8688×5792),搭配的镜头型号为EF 50mm f/1.8 STM。
其内方位元素及畸变参数[10-11],如表1所示。
在起重机机下方的合适位置找到特征明显的控制点4个,调整好焦距,拍下清晰的像片,移动相机到另一个摄站点,进行同样的操作。
拍摄过程中要保证左右两张像片上都有4个控制点及待测平面。通过计算机摄影测量程序处理照片,获得点云的物方坐标,然后利用最小二乘法处理点云得到平面度计算结果。
对一台门机可进行多次拍摄,取得多张像片,增加实验的稳定性。
实验流程,如图7所示。

图7 实验流程图Fig.7 Experimental Flow Chart
4.2 实验结果与分析
实验对3台门座起重机拍摄,如图8所示。分别为3台门座起重机的选点图,为了避免实验的偶然性,每个待测面取20个点。
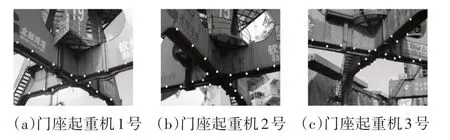
图8 门座起重机选点图Fig.8 Site Selection Diagram of Portal Crane
对每台门座起重机取5个不同摄站点进行拍摄,每个摄站点取1张像片,5张像片记为1组,对每台门座起重机取5组计算。
实验结果,如表2~表4所示。
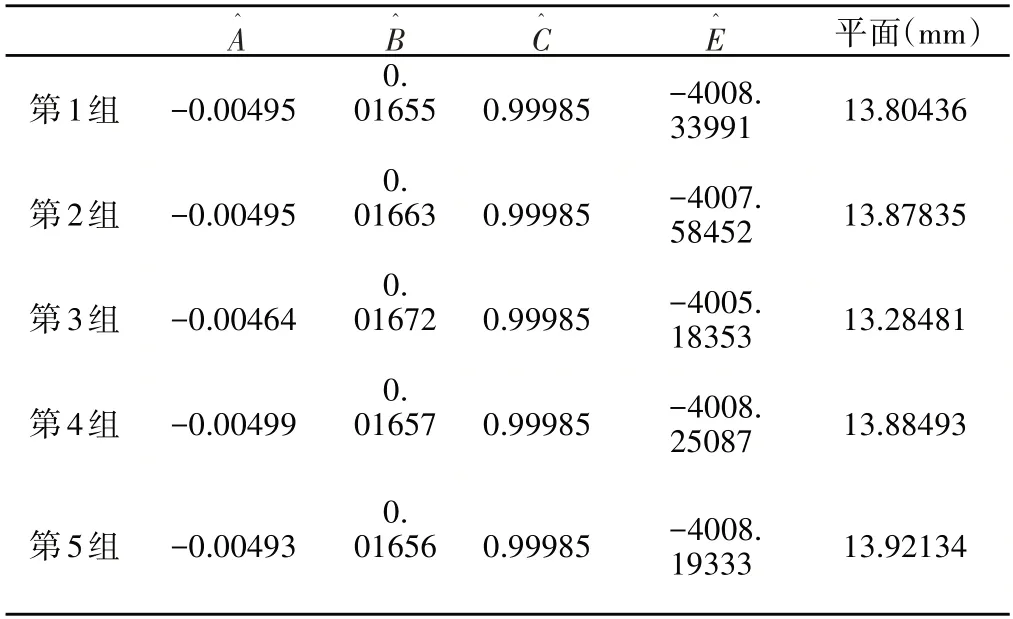
表2 门座起重机1号实验结果Tab.2 Experimental Results of Portal Crane No.1

表3 门座起重机2号实验结果Tab.3 Experimental Results of Portal Crane No.2

表4 门座起重机3号实验结果Tab.4 Experimental Results of Portal Crane No.3
,,,是式(27)中的待定参数,代表拟合平面方程。
门座起重机1 号的平面度均值为:13.75476mm,最大值为:13.92134mm,最小值为:13.28481mm;
门座起重机2 号的平面度均值为:16.69741mm,最大值为:16.73409 mm,最小值为:16.59285mm;门座起重机3 号的平面度均值为:9.251904mm,最大值为:9.32624mm,最小值为:9.14021mm;
多台门座起重机的多组实验数据波动较小,每组值均在平均值附近较小范围内波动,所求得的平面度数值也比较稳定,满足工程领域的需要。
表1~表3的第一组点的平面拟合图,如图9所示。

图9 门座起重机平面拟合图Fig.9 Plane Fitting Diagram of Portal Crane
5 结语
针对起重机的特点,通过近景摄影测量方法获得点云的位置信息,从数理统计的角度运用最小二乘法拟合平面,能够稳定,准确的计算平面度数值。
算法有明确的数学理论支撑,方便在计算机上大量处理像片及相关数据,所用时间短。
计算机及相关程序的应用,能够快速地计算,尤其在测量较大平面时,点云数量足够庞大,该算法的优势将进一步体现。
平面度与起重机安全性评估有十分密切的关系,为其提供了有力支撑,利用其它学科领域的技术来解决传统大型机械的安全性评估问题目前显得十分必要,同时也对起重机之外的其它大型机械的安全性评估也有一定程度的参考价值。
