煤矿井下运输巷道人员误入报警系统研究
2022-07-26吴连勇郭栋梁
吴连勇,郭栋梁
(1.潞安化工集团 司马煤业有限公司, 山西 长治 047105; 2.太原科技大学, 山西 太原 030024)
运输巷道是井下煤炭开采运输的主要运输途径,煤矿井下空间小,设备多,人员流动性大,实现通行人员与工作设备之间的安全高效管控难度较大。因人员安全意识不足和井下安保措施不到位导致运输巷道事故频发,研究其原因主要有:人为因素:人员缺乏足够的安全意识和自我保护意识,对安全生产的重要性缺乏合理认识,未严格按照安全流程进行操作;设备因素:现有设备识别度低,无声光报警器和语音提示器,设备无可靠联动拦截停机闭锁装置。
针对以上生产管理中遇到的问题,基于当前迅速发展的AI智能识别技术、物联网技术、5G通讯技术设计了一套煤矿井下运输巷道人员误入报警系统。通过5G技术实现对误入区域视频监控的实时采集传输以及整个运输巷道的低延时音频语音提示。机车即将运行到巷道口有误入人员进入黄色警戒时给出声光报警提示并通过本安型摄像仪对误入人员拍照,利用5G高速率、大宽带特性实时传输照片信息至监测与控制中心进行身份识别,有误入人员进入危险区域启动拦截装置并进行机车停机闭锁,避免安全事故发生。
1 系统总体设计
煤矿井下运输巷道人员误入报警系统由监测传感系统、AI视觉识别监控系统、语音提示及声光报警系统、误入人员拦截及机车停机闭锁系统4部分组成。其中监测传感系统通过传感器实现对通行人员的跟踪定位。AI视觉识别监控系统通过本安型摄像仪进行整个误入区域的视频监控和对误入人员进行照片拍摄,误入人员的位置和照片信息利用物联网技术和5G通信技术通过本安型基站传输至监测与控制中心,监测与控制中心处理数据并通过计算机和LED显示屏显示误入人员的位置和身份信息。语音提示及声光报警系统由语音提示器对整个运输巷道的通行人员进行语音提醒,提高人员的安全意识;当机车即将运行到巷道口且误入人员已经进入黄色警戒线时,声光报警器开始报警,以提示误入人员注意运行机车且退出黄色警戒线等候机车通过。误入人员拦截及机车停机闭锁系统中拦截装置由道闸系统构成,机车停机闭锁系统由钳盘式制动器构成,机车即将运行到巷道口且误入人员已进入危险区域时,机车制动钳迅速制动同时道闸杆落下以阻止误入人员通过,通过拦截装置与机车停机闭锁装置联动保证误入人员的安全,误入人员退出黄色警戒线后,机车重新启动运行,待机车完全驶离运输巷道口后,道闸杆升起允许通行人员继续通行,见图1.

图1 煤矿井下运输巷道人员误入报警系统图
2 硬件设计
煤矿井下运输巷道人员误入报警系统硬件部分由地面和井下两部分构成。其中,地面部分主要包括地面工业以太环网、WEB服务器、数据库服务器、无线路由器、用户计算机、LED显示屏、地面5G基站等组成。井下部分主要包括井下工业以太环网、井下交换机、监测传感器、本安型摄像仪、语音提示器、声光报警器、拦截装置及机车停机闭锁装置等组成。其中,监测传感器对运输巷道通行人员的位置进行监测定位,同时将采集的数据信息反馈至监测与控制中心,拦截装置实现运输巷道口的迅速封闭,机车停机闭锁装置使机车快速停机闭锁以保护误入人员的人身安全,AI视觉识别监控误入区域且对误入人员身份识别。系统构架图见图2.
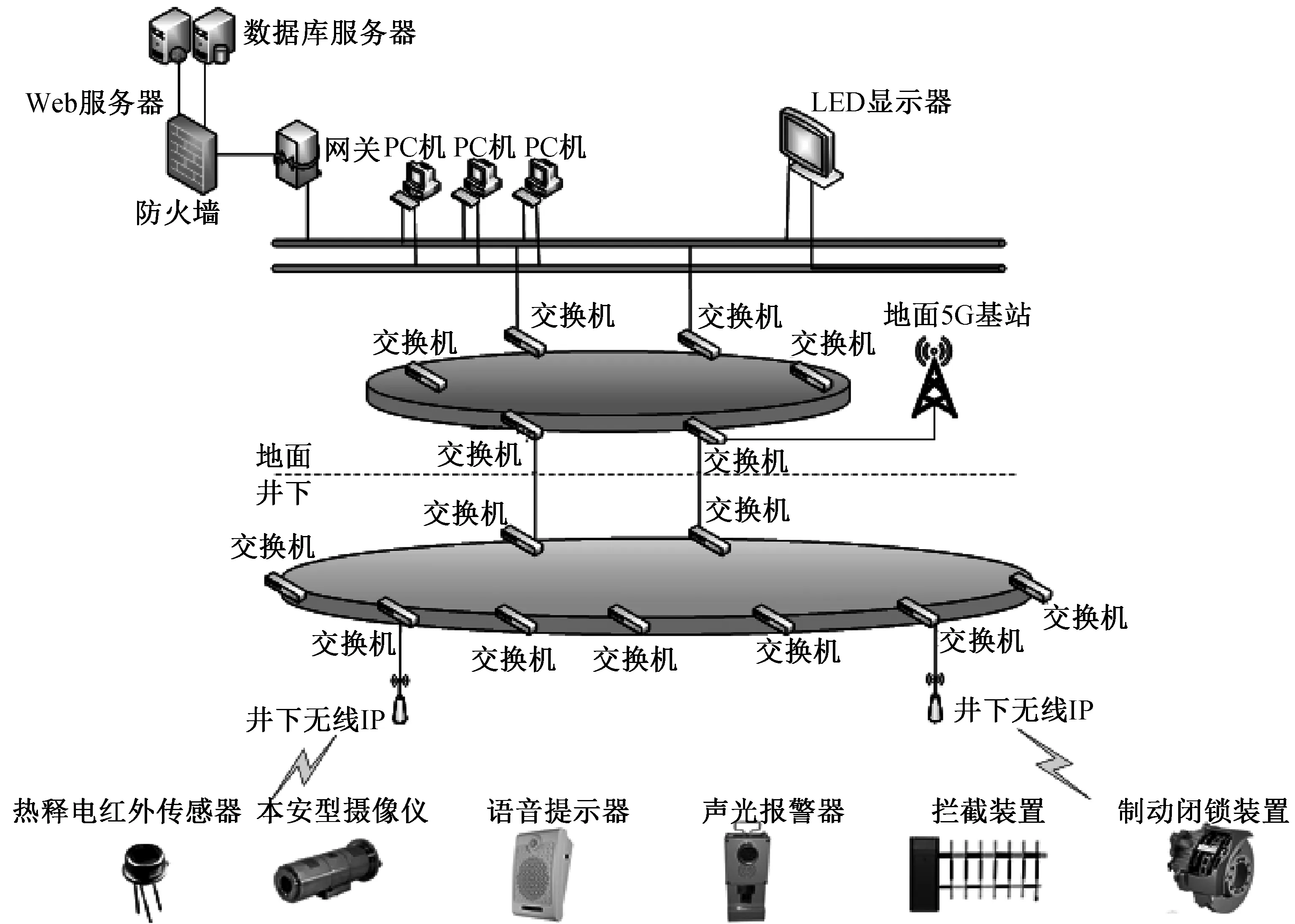
图2 系统架构图
2.1 监测传感器
监测传感器主要由热释电红外传感器模块组成。在运输巷道中,热释电红外传感器模块用来检测运输巷道是否有人员通行,实现对通行人员的位置定位。热释电红外传感器模块结构框图见图3.

图3 热释电红外传感器模块图
使用移动电源为热释电红外传感器模块提供+7 V电压,电源稳压电路由低压差线性稳压器(型号为HE9073)为热释电红外传感器模块的各部分提供稳压电源。当通行人员进入每个监测区域时,因为人体的正常温度保持在37 ℃左右,人体自身会发出特定波长范围的红外信号,对应监测区域的红外传感器监测并采集人体发出的特定红外信号并将此红外信号转化为电信号。由于通行人员距离红外传感器位置远近的不同会导致红外传感器输出的电信号强度不同。
这些电信号强度一般较弱,需要放大电路对传感器输出的信号进行放大,采用滤波电路对放大信号中的杂波信号进行过滤。最终,过滤后的电信号通过一系列的数据传输处理显示在监测与控制中心,实现通行人员在巷道位置的实时监控。
2.2 拦截装置
拦截装置实现机车即将运行到巷道口时对危险区域的误入人员进行拦截,避免造成生产安全事故。拦截装置主要由道闸系统组成,其中道闸系统包括智能控制器、电动机驱动器、电动机、道闸机构。道闸系统图见图4.

图4 道闸系统图
智能控制器接收监测与控制中心发出的控制信号来控制道闸杆升杆和落杆、遇阻时的停启、道闸杆的运动速度。电动机驱动器驱动电机正反转及调整电机转速,使得道闸杆在运行过程中匀速平稳。电动机是道闸系统中重要执行件之一,电动机驱动道闸机构快速动作。道闸机构主要由道闸杆、箱体、减速器、机械传动部分等组成。道闸结构示意图见图5.

图5 道闸结构示意图
2.3 机车停机闭锁装置
盘式制动和传统鼓式刹车相比较,盘式制动散热速度快、径向尺寸小、制动力矩大、可以在工况环境较差的地方使用且维护方便。因此,该设计中机车停机闭锁装置选用钳盘式制动器,制动钳和制动盘是钳盘式制动器的重要部分。金属块和金属背板组成摩擦片,每个钳盘式制动器中有两片摩擦片,摩擦片及其推动装置固定在制动钳的夹钳形支架中构成制动钳,制动钳安装在机车上,制动盘安装在机车齿轮上。
当机车即将运行到巷道口有误入人员步入危险区域时,监测与控制中心发出紧急停机指令使机车紧急制动,制动时液压油通过油路进入液压缸,液压缸驱动制动钳使制动钳上的摩擦片接近制动盘直到摩擦片接触制动盘并使机车完全停机。待误入人员退出黄色警戒线后,监测与控制中心发出机车启动指令,刹车片与制动盘分离且刹车片退回特定位置。机车停机闭锁装置实现紧急情况下的机车快速停机制动,提高机车运行中的安全性。
2.4 AI视觉识别
AI视觉识别监控具备两种功能:一种是误入区域的全时段视频监控。监控设备启动后,设备根据监控环境自动设置采集帧数、信噪比、亮度等参数,全时段、多方位对误入区域视频信号采集,采集的信号通过5G通信技术实时传输至监测与控制中心,在监测与控制中心用LED显示屏显示视频信息,满足管理人员对误入区域情况的实时了解。另一种是误入人员拍照及身份识别。当机车即将运行到巷道口时,本安型摄像仪对误入区域的误入人员拍照,同时将照片信息传输到监测与控制中心进行数据处理,图片预处理提高图片清晰度、色彩鲜明度,改良图片视觉识别效果。为提高误入人员身份识别效率,在预处理后的图片中把误入人员目标从背景中提取出来。将提取出来的误入人员照片与矿工信息库中的照片进行对比、查找来确定误入人员身份信息并将身份信息显示在计算机和LED显示屏。
3 系统设计
煤矿井下运输巷道人员误入报警系统采用Keil software公司的KEIL4软件开发设计。该软件具有灵活的窗口管理系统,并具有较强的可读性和可维护性。煤矿井下运输巷道人员误入报警系统的基本工作流程为:监测→判断→声光报警→误入人员拦截及机车制动。程序流程图见图6.

图6 程序流程图
4 系统应用
潞安化工集团某煤矿之前对误入人员的管理采用定人定点的人工监督管理方式,控制中心无法做到全时段对监督人员是否在岗进行监管,人工看护成本较高且安全性较低,设备之间的联动水平低,紧急情况下的机车制动不及时。
为了解决上述问题,该煤矿应用了煤矿井下运输巷道人员误入报警系统且该系统在运输安全中发挥了重要作用并有良好的效果,总结如下:
1) 用热释电红外传感器模块对通行人员位置定位并实现了人员位置信息的可视化,管理人员可通过计算机对通行人员位置信息实时查看。
2) 拦截装置与机车停机闭锁装置联动,紧急情况下保证多种方式来保障误入人员的生命安全,提升自动化水平。
3) AI视觉识别的应用实现对误入区域24小时监控和误入人员身份信息的高效识别,解决了人工监管存在的旷工、监管不严等问题,实现了智能化监管,推动了煤矿智能化发展。
5 结 论
本设计结合AI智能识别技术、物联网技术、5G通信技术等实现了对误入人员的精准定位、身份识别和误入拦截,保障了误入人员的生命安全。该系统符合当前企业生产条件需求,有效降低了运输巷道人工看护成本,提高企业智能化和技术化水平,有良好的市场前景和可观的市场需求。
