基于EMEBN 的空中目标战术意图识别方法*
2022-07-25杨雨田李建国
杨雨田,杨 杰,李建国*
(1.北方自动控制技术研究所,太原 030006;2.驻南京地区第三军事代表室,南京 211153)
0 引言
在现代防空作战中,对敌方空中目标进行战术意图识别极其重要。信息化条件下的战场环境复杂多变,并呈现隐蔽性、欺骗性和对抗性等特征,单纯依靠人工难以快速、准确识别敌方目标的战术意图,迫切需要建立高效、可信的战术意图识别方法,为对空防御作战指挥决策提供辅助支撑。
目前围绕目标战术意图识别问题的研究方法主要有模板匹配、证据理论、神经网络、贝叶斯网络等,并在不同的作战场景中得到了应用。
曾鹏等基于模板匹配的方法进行战术计划识别模型的设计,此方法比较容易实现,适用于意图范畴较为明确的战术意图识别,但该方法机械地将战场态势割裂,没有考虑意图的隐蔽性和欺骗性。孙越林等建立高维空间相似度模型,结合D-S 证据理论(dempster-shafer evidence theory)进行目标战术意图识别,使用证据理论可能会导致庞大的计算量。刘砚菊等将径向基RBF (radial basis function)神经网络的方法用于空中目标识别。神经网络具有一定自学习能力,不需要组织大量的产生式规则,但神经网络存在网络训练困难、特征提取难度大和计算精度低等问题。
贝叶斯网络具有很强的因果概率推理能力,能够通过网络参数的不断更新,动态地适应战场变化,解决意图的不确定性推理问题。王昊冉等针对战场的不确定性因素,提出了基于MEBN 的态势描述贝叶斯网络(situation on-specific bayes network,SSBN)构建算法进行空中目标意图识别,但只考虑了单个目标的意图识别;葛顺等将动态序列贝叶斯网络用于战术意图识别,但对复杂战场环境下的意图识别影响因素考虑不充分。
本文针对复杂战场环境中敌战术意图存在动态性和序列性的特点,利用贝叶斯网络构建DSBN战术意图识别推理模型,并分析MEBN 在表达规则知识概率迁移关系和序列关系方面的不足,提出基于EMEBN 的DSBN 构建方法进行战术意图识别。
1 模型的推理与构建
1.1 意图推理识别过程
作战意图识别是作战任务规划的逆过程,是任务规划执行方与识别方从两个相对的角度看待作战规划的过程。战术层面的目标意图识别过程是根据观测到的敌目标行动序列集合,经过基于相应规则逻辑的分析推理或量化计算,最终推导出对方意图的推理过程。任务规划方与意图推理方之间的关系如图1 所示。
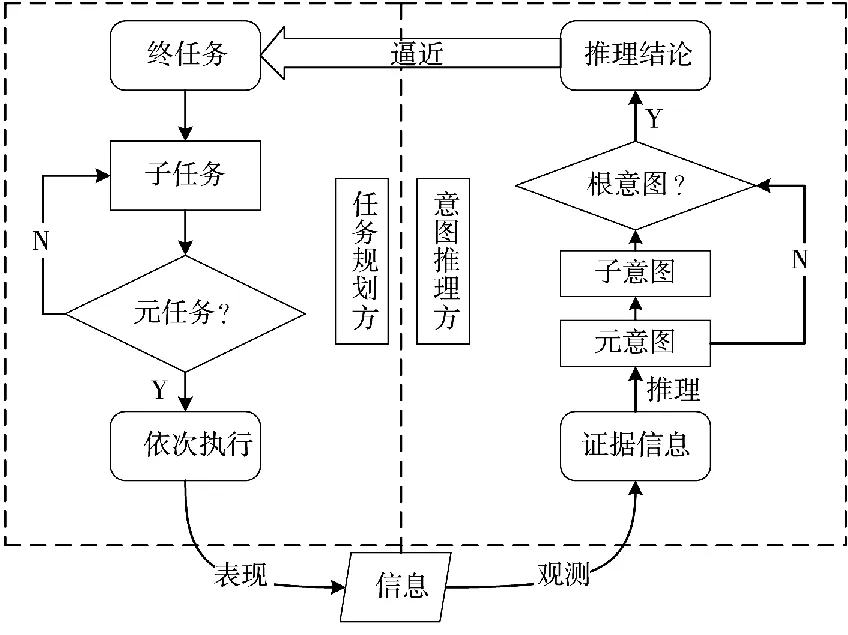
图1 任务规划方与意图推理方之间的关系
从任务规划方来看,作战任务是遂行作战意图的具体途径,作战任务规划将上级作战意图按照一定条件和规则分解为若干任务单元执行的子任务序列,每个作战单元再将分配给自己的子任务分解为一系列元任务序列,协同作战单元依次完成系列战术行为动作就实现了相应的作战意图。
从意图观测推理方来看,意图推理是一个自下而上的逆向过程。由于敌方根意图存在一定的隐蔽性和欺骗性,不可能被直接观测到,只能由元意图和子意图逐层推理分析。元意图推理分析的证据信息来自作战任务规划方遂行元意图时表现出的战术行为动作,由这些证据信息的状态序列推理出相应元意图,然后逐层逆向推理各级子意图,最终计算得到概率最大的根意图作为推理结论。
1.2 模型的构建
针对复杂战场环境中敌目标战术意图存在的动态性、序列性问题,引入动态贝叶斯网络(dynamic bayesian network,DBN)和序列贝叶斯网络(series bayesian network,SBN),构建描述战术意图表达和推理的DSBN 模型如图2 所示,意图推理需要由DBN 和SBN 两个环节完成,先由DBN 根据各证据状态推理得到元意图、子意图,再由SBN 对子意图的序列关系逐层推理得到根意图。
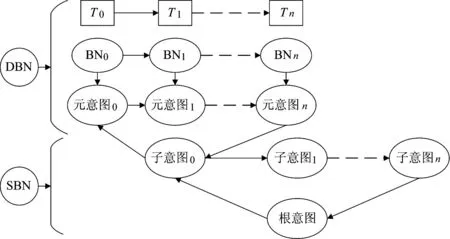
图2 DSBN 战术意图推理模型
1.2.1 基于DBN 模型的元意图、子意图推理
DBN 是贝叶斯网络(bayesian network,BN)在时间领域的扩展,是一种描述系统随时间变化的推理模型,能够反映系统随时间变化的动态特性,如下页图3 所示。
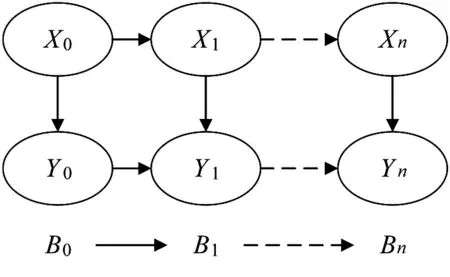
图3 DBN 示意图
DBN 数学表达为<B,B>,其中,B表示初始时刻T的BN 模型状态,B表示相邻时刻BN 模型状态B到B的变化过程。
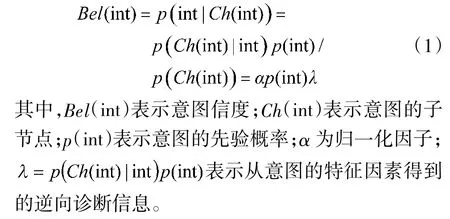
对于任一时刻的BN 结构,满足公式
1.2.2 基于SBN 模型的根意图推理
SBN 是BN 在状态序列的扩展,这种序列展开特征是BN、DBN 无法描述的。图4 表示事件X 在X到X的状态序列下对事件Y 的逻辑推理过程。
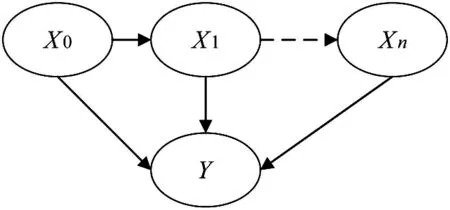
图4 SBN 示意图
SBN 中,根据序列概率关系,相应父节点的状态信度p(I)即为对应子节点某一特定状态序列的信度,即:

其中,p(i)表示在相关证据条件下;j 时刻意图的状态概率;p(i|i)表示意图转移概率。
2 扩展MEBN 的DSBN 模型构建方法
2.1 MEBN 的局限性
MEBN 由逻辑片断推理规则集合MTheory 和常量逻辑片断Fingdings 构成,MTheory 由基本逻辑片段B-MFrags(basic-MEBN fragments)组成,Findings给定了未知事件相关的先验信息。二者确定了未知事件的推理规则和初始条件,使得MEBN 模型不仅具备贝叶斯网络的概率推理能力,而且拥有一阶谓词的规则知识表达能力,将若干MFrags 按需有机组合起来,能够达到描述完整逻辑关系的目的。基于MEBN 的动态贝叶斯网络构建过程如图5 所示。
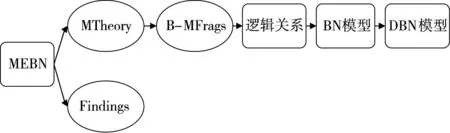
图5 MEBN 和DBN 模型对应关系
根据第1 节模型推理内容,DSBN 模型由两个部分构成,其中DBN 模型部分推理的是事件的时间动态化过程,该部分的逻辑推理可以由MFrags 表达;而另一部分SBN 模型推理的是事件的序列化过程,该部分的逻辑推理无法由MFrags 表达,从而无法由MEBN 来构建DSBN 模型。因此,需要对MEBN 中的表达能力也就是MFrags 逻辑片断进行必要的扩展,使之具备对序列过程的表达能力,才能用于DSBN 模型的构建。
2.2 扩展MEBN 下的DSBN 构建方法
本文引入概率迁移逻辑片段(probability transfer-MFRags,PT-MFrag)和序列关系逻辑片段(series relation-MFrags,SR-MFrags),对MEBN 进行扩展,使其具备对事件状态的迁移过程和序列过程的表达能力,支撑DSBN 模型构建。扩展MEBN 和DSBN模型对应关系如图6 所示,其中虚线表示在MEBN基础上的扩展部分。

图6 扩展MEBN 和DSBN 模型对应关系
扩展MEBN 由逻辑片断推理规则集合EMTheory 和常量逻辑片断EFingdings 构成,EMTheory 由3类逻辑片段组成:
1)基本逻辑片断B-MFrags(Basic-MFrags),用于描述随机事件之间的相互逻辑关系;
2)概率迁移逻辑片断PT-MFrags,用于描述随机事件状态概率迁移过程;
3)序列关系逻辑片断SR-MFrags,用于描述随机事件状态时序序列和根事件状态空间的对应关系。EFindings 给定了未知事件相关的先验信息。二者确定了未知事件的推理规则和初始条件。
基于扩展MEBN 的DSBN 构建过程如下:1)从EMTheory 检索与具体实例相对应的B-MFrags、PT-MFrags 和SR-MFrags 3 类逻辑片断;2)实例化逻辑片断,将B-MFrags 实例化为DBN 模型中的事件之间的逻辑关系;将PT-MFrags 实例化为SBN 模型中子序列之间的状态迁移关系;将SR-MFrags 实例化为SBN 模型中根事件与子序列之间的分解关系;3)合并实例化的逻辑片断,最后得到一个由证据信息向结论延伸的推理模型,该模型即为构造的目标DSBN 模型。
3 防空作战实例验证
3.1 防空作战场景
本文给出了一个海域巡航防空作战想定场景:我方舰艇在M 海域巡航,某一连续时刻,在船舰传感器探测范围内出现敌方4 批飞机编队,每批编队由4 架飞机组成。根据探测到的敌方编队的飞行高度、飞行速度、距离、电磁干扰信号、队形5 种目标特征属性,按照相应的专家先验知识及推理规则对目标特征属性信息进行处理,进而对空中目标意图(突袭、拦截、协同突袭、护航)进行判断识别。防空作战场景如表1 所示。
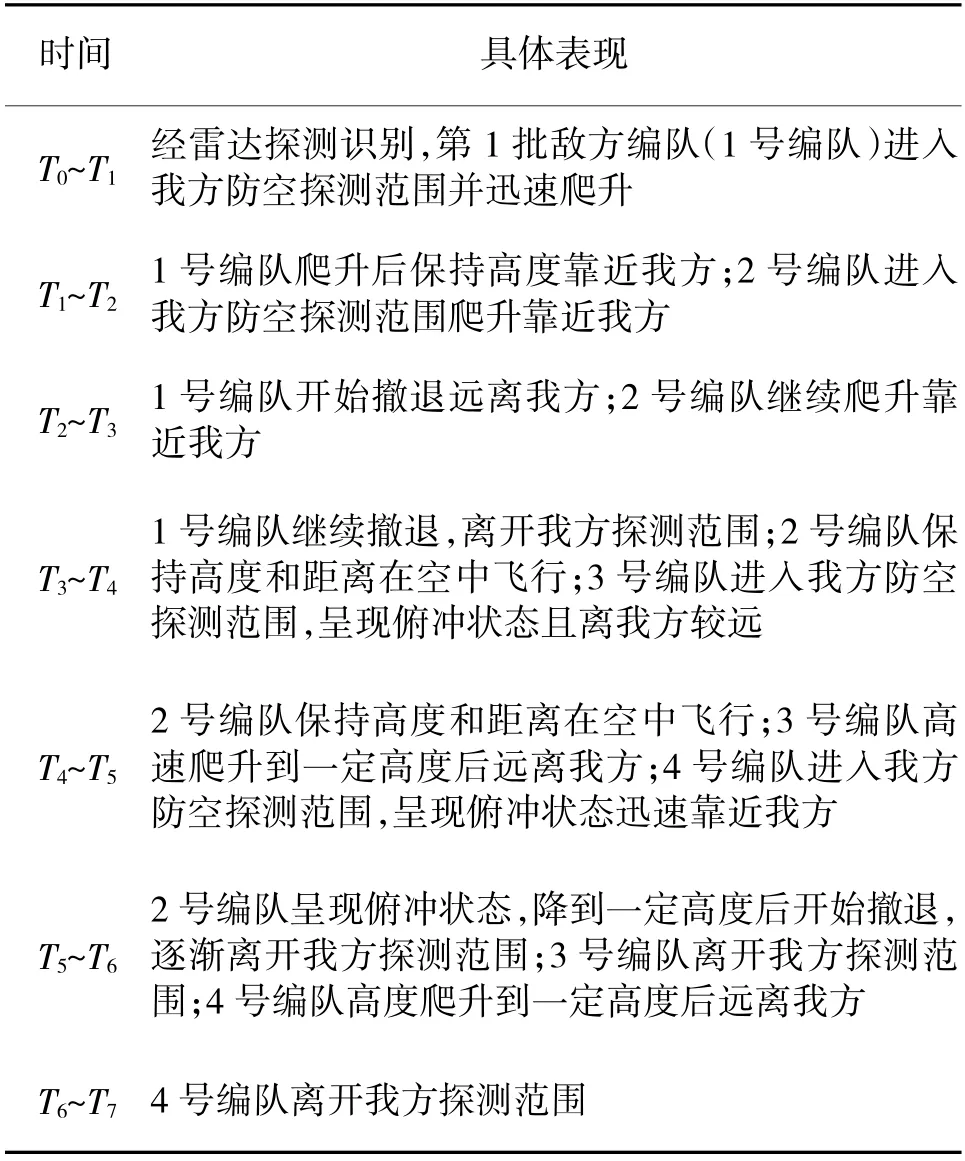
表1 防空作战场景具体描述
根据军事领域相关专家的先验知识,防空作战中的规则知识(由基本逻辑片段B-MFrags 组成)如下:
敌方目标可能的典型战术意图(根意图)有I={突袭(i)、拦截(i)、协同突袭(i)、护航(i)};
子意图B={侦察(b)、电磁干扰(b)、佯动(b)、火力打击(b)、巡逻(b)、隐蔽接敌(b)、返航(b)};
元意图A={低空高速巡航(a)、低空高速盘旋(a)、中空盘旋(a)、中空巡航(a)、中空高速巡航(a)、高空电磁干扰盘旋(a)、超高空盘旋(a)};
元意图的特征属性C={飞行高度(H)、飞行速度(v)、距离(D)、电磁干扰信号(ES)、队形(RK)},其中,H={超高,高,中,低},v={高速,低速},D={远,近},电磁干扰信号={有,无},RK={梯形,楔形,纵形,人字形,菱形};
对空中目标的特征属性进行划分:飞行高度=[超高:H>10 km,高:5 km<H≤10 km,中:1 km<H≤5 km,低:H≤1 km];速度=[高速:v>1 000 km/h,低速:v≤1 000 km/h];距离=[远:D>120 km,近:D≤120 km];队形=[梯形:常用于攻击,楔形:常用于出航、巡逻、返航,纵型:常用于侦察,人字形:常用于干扰,菱形:常用于摧毁具体目标]。
3.2 目标战术意图推理实例化
由1.1 可知,意图的观测推理是一个逆向的自下而上的过程,本防空作战想定实例中,推理分析的原始证据信息来自任务规划方表现出的各类特征属性信息,先由观测到的目标特征属性推理出相应元意图、子意图,然后逐层逆向推理根意图,最终计算得到概率最大的根意图作为推理结论。
3.2.1 DBN 模型实例化
1)依据防空作战场景想定,将上述B-MFrags表示为目标特征属性与元意图之间的逻辑关系来构造DBN 模型,如下页图7 所示。

图7 防空作战场景中的DBN 模型
其中,T~T每个时间段不同编队对应的元意图(a~a)不同,每个编队元意图包含飞行高度、飞行速度、距离、电磁干扰信号、队形共5 种特征属性。
2)基于先验概率和目标特征属性,进行元意图推理。
根据军事领域相关专家的先验知识,空中目标元意图和特征属性状态之间的先验概率表如表2所示。
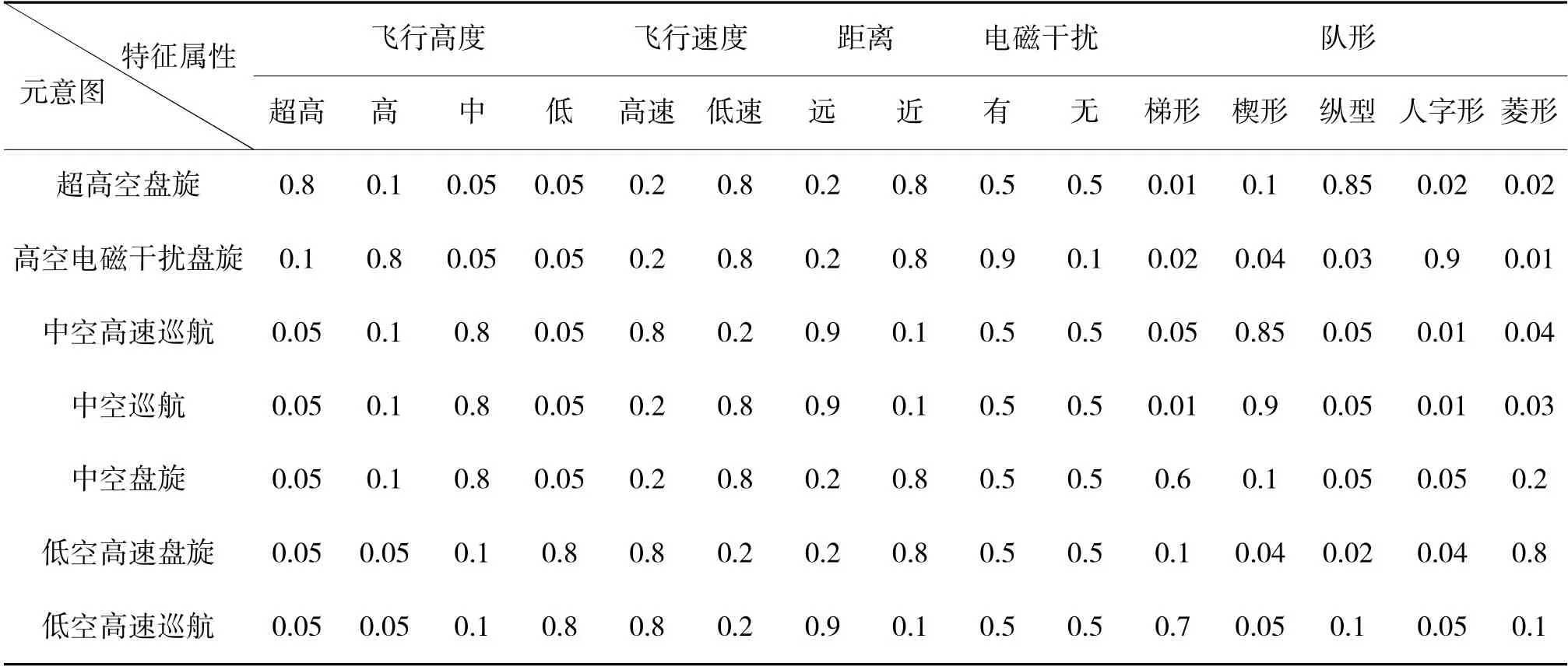
表2 空中目标元意图和特征属性状态之间的先验概率
我方检测出敌方4 个编队连续时刻特征属性值,将各特征属性值进行归一化处理后得到表3 所示的特征属性概率向量表。
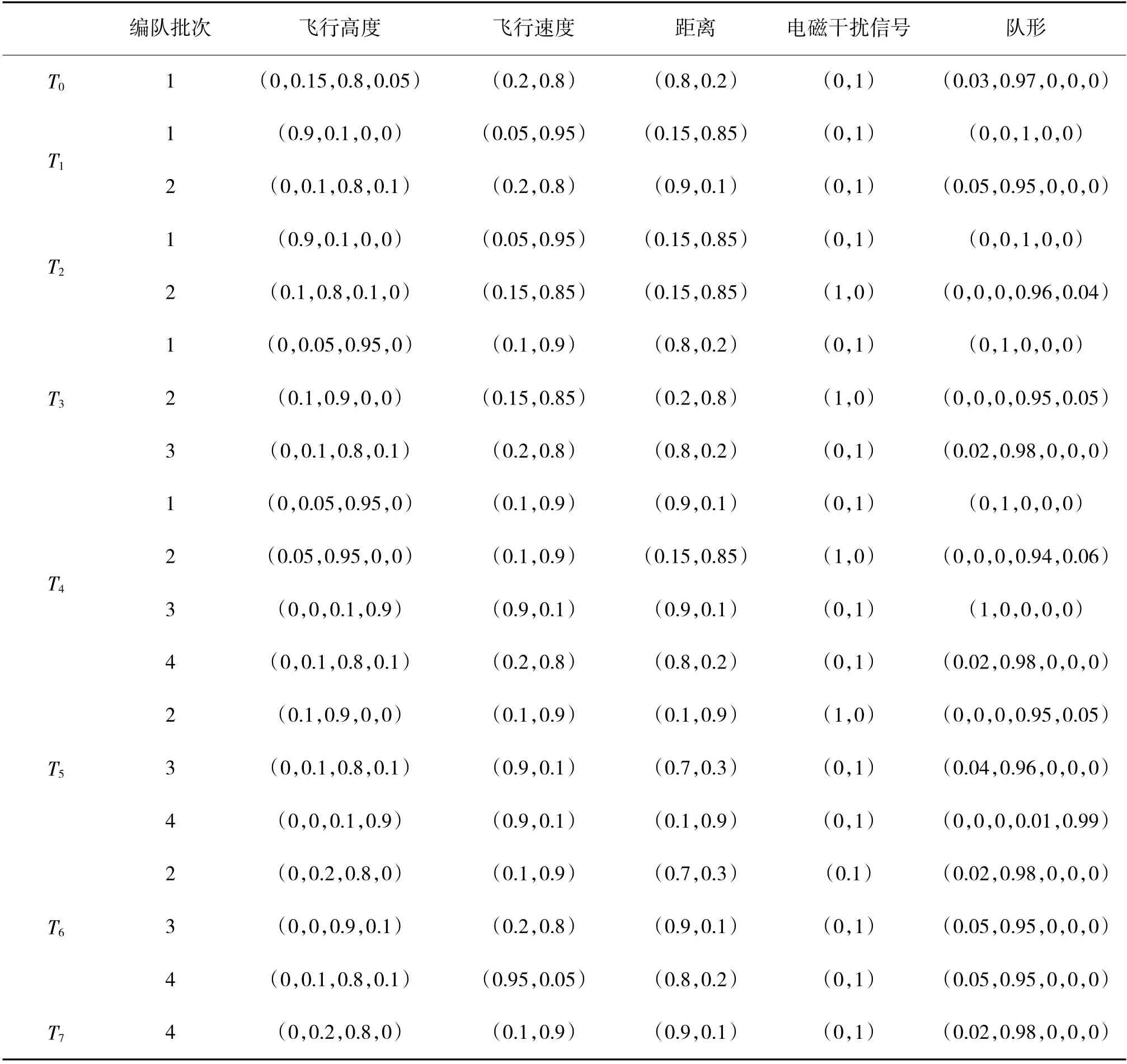
表3 编队特征属性概率向量表
在T时刻,根据1.2 中DBN 模型的式(1)推导得到1 号编队元意图为超高空盘旋的概率置信度为:
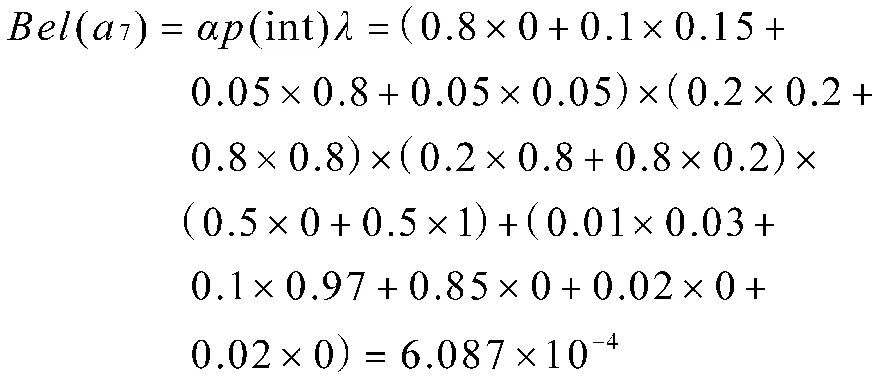

同理可以依次计算得出T时刻其他元意图的概率置信度:
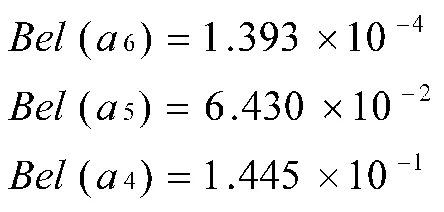
按照上述顺序对7 种元意图的概率置信度进行归一化处理,可得到T时刻1 号编队各元意图概率向量为(0.003,0.001,0.294,0.659,0.038,0.001,0.004),同理计算出4 个编队在其他时刻对各元意图的概率向量见169 页表4 所示。
3)基于元意图序列进行子意图推理
通过分析表4 数据可以得出4 批编队元意图序列如图8 所示,其中,纵坐标依次以1~7 来表示a~a7 种元意图,横坐标表示T~T时刻。
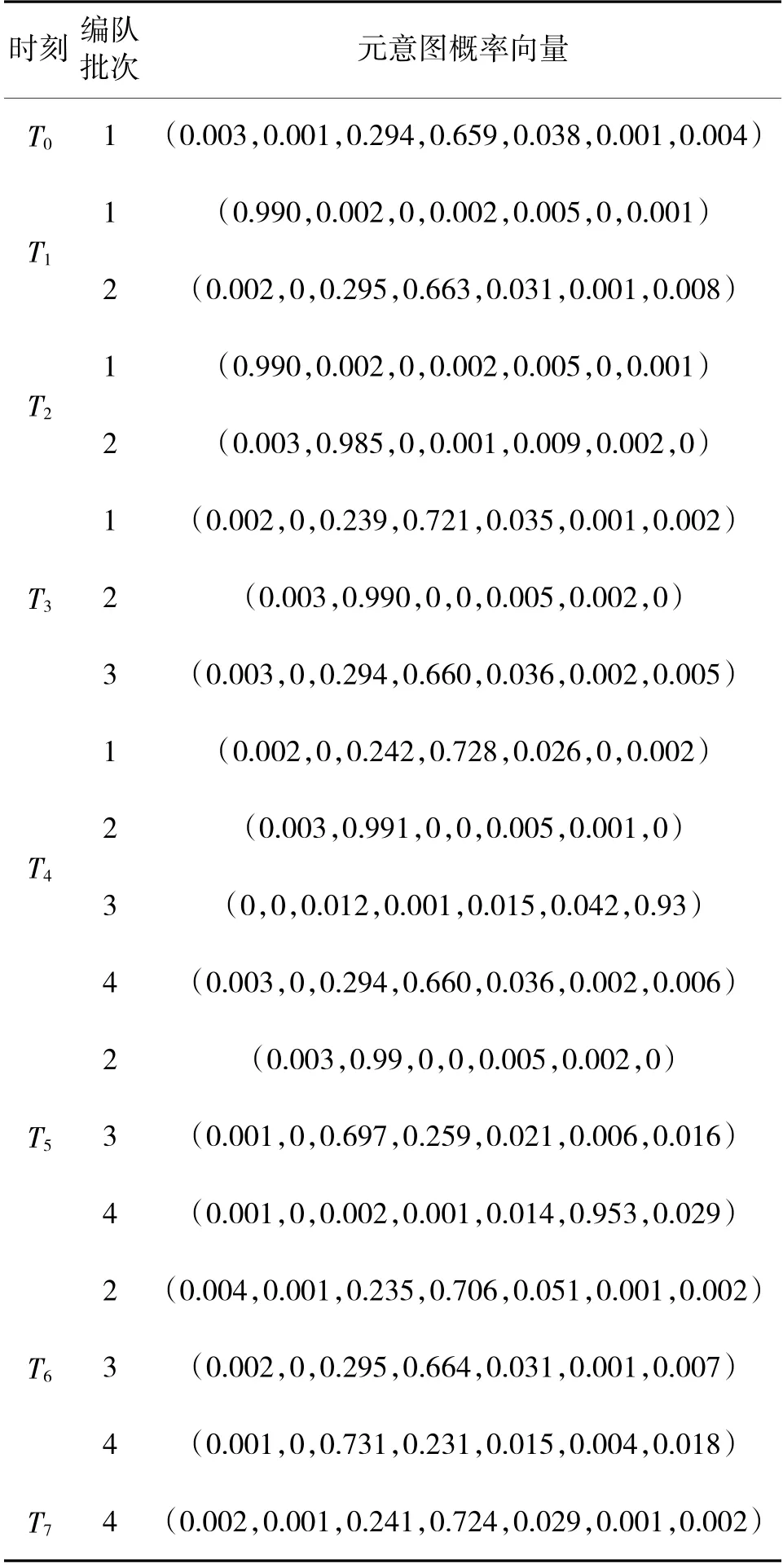
表4 元意图概率向量表
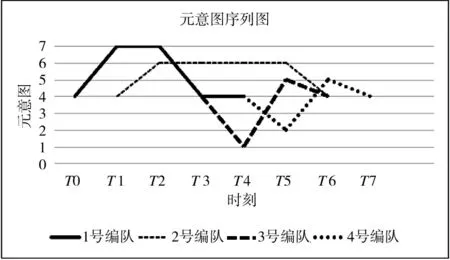
图8 编队元意图序列图
给定统计假设:空中目标一般以中空巡航进入我方探测范围,接着有同等可能即1/7 的概率转为其他7 种元意图(低空高速巡航、低空高速盘旋、中空盘旋、中空巡航、中空高速巡航、高空电磁干扰盘旋、超高空盘旋);若编队的元意图序列由中空巡航变为中空高速巡航,考虑到战场环境中隐蔽性和欺骗性等因素,编队有30%的概率为巡逻,40%的概率为隐蔽接敌,30%的概率为返航;若编队的元意图序列由中空巡航变为超高空盘旋,则编队有90%的概率为侦察。类似给出其他6 种元意图序列关系,如图9 所示。
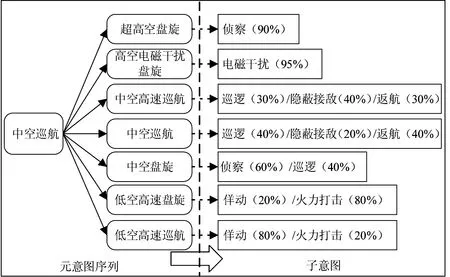
图9 元意图序列关系
由图8 可知,1 号编队在T~T时间段,完成以下元意图序列概率最大:中空巡航→超高空盘旋→超高空盘旋→中空巡航→中空巡航。T~T阶段,元意图概率向量发生变化,该阶段结合式(1)和图9中元意图序列与子意图的推理概率关系,可以推导得出子意图分别为侦察、电磁干扰、佯动、火力打击、巡逻、隐蔽接敌、返航的概率为(0.986,0.001,0.002,0.005,0.002,0.003,0.001);T~T时间段,元意图概率向量不变,可推出意图未改变,与上一时间段相同;T~T时间段,编队由超高空盘旋转为中空巡航,撤退远离我方;T~T时间段,意图不变继续撤退。根据推理判断得出1 号编队子意图最有可能为侦察,概率为98.6%。
同理2、3、4 号编队子意图为b~b的概率分别为(0.005,0.974,0,0,0.006,0.005,0.01)、(0.001,0,0.926,0.038,0.011,0.01,0.014)、(0.001,0,0.026,0.951,0.009,0.005,0.008),根据推理判断得出2、3、4 号编队的子意图最有可能为电磁干扰、佯动、火力打击,概率分别为98.6%、97.4%、92.6%、95.1%。
3.2.2 SBN 模型实例化
本节将相对应规则知识中的PT-MFrags 所表达的内容,表示为子序列之间的状态迁移关系;将SR-MFrags 所表达的内容,表示为来根事件与子序列之间的分解关系,从而构造SBN 模型,由子意图逐层推理根意图。
SBN 的推理同样需要专家先验规则知识,假设敌方空中目标以侦察作为第1 步开始执行任务,侦察的后续行为有50%的概率为电磁干扰,30%的概率为隐蔽接敌,20%的概率为巡逻;若第2 步任务进行隐蔽接敌,后续行为有80%的概率为火力打击,20%的概率为电磁干扰;若第3 步进行火力打击,后续行为有80%的概率为隐蔽接敌。由专家先验知识得到,侦察→隐蔽接敌→火力打击→隐蔽接敌的子序列是实现拦截的过程,以此类推,侦察→干扰→佯动→打击的子序列是突袭的过程,侦察→隐蔽接敌→电磁干扰→返航的子序列是协同突袭的过程,侦察→巡逻→巡逻→巡逻的子序列是护航的过程。确定了子意图概率迁移关系及根意图与子序列分解关系,即可构建SBN 模型,如图10 所示。
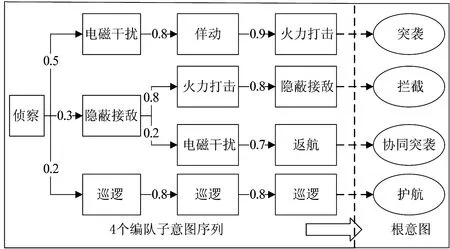
图10 防空作战场景中的SBN 模型
根据上述SBN 模型中子意图概率迁移关系及根意图与子序列分解关系,由式(2)推导得到战术意图概率如下:
经过归一化处理,可以得到敌方突袭我方的概率为97.8%,依次进行了侦察→干扰→佯动→火力打击的意图规划序列。
若采用DBN 在相应战术规则下进行意图推理,能够推理出4 个编队在连续时刻各自的战术意图,此实验中,4 个编队意图分别为侦察、电磁干扰、佯动、火力打击,但DBN 无法根据4 个编队的子意图序列关系推理得到敌方编队的根意图。而DSBN 由两部分组成,首先采用DBN 根据编队特征属性推理出子意图,再采用SBN 根据连续时刻编队的子意图推理得到根意图,这种模型的推理结果更加全面可信。
4 结论
本文针对复杂战场环境中敌目标战术意图存在的动态性、序列性等问题,提出基于扩展MEBN的DSBN 构建方法进行战术意图识别。将该方法用于敌方多批空中目标协同作战场景,实现对多个敌方目标在连续时刻下的战术意图推理,验证了该方法的可行性和有效性。