多参数捷变雷达快速MTD 算法*
2022-07-25张宏亮刘丰恺郭新荣黄大荣
张宏亮,刘丰恺,郭新荣,黄大荣*
(1.空军工程大学防空反导学院,西安 710051;2.武警工程大学基础部,西安 710086)
0 引言
雷达回波相干性的好坏会极大地影响雷达信号处理性能。强相干性的回波通过相干积累在提高信噪比的同时,能够提供目标更多的信息。脉冲多普勒(pulse-doppler,PD)雷达中的MTD 算法性能强依赖于回波间的相干性,但PD 雷达极易受到干扰和杂波的影响。随着电磁环境的日益复杂,PD 雷达越来越难以取得理想的目标检测效果。
为了提高雷达抗干扰的能力,参数捷变体制雷达应运而生。雷达参数(例如中心频率,脉冲重复频率等)在脉冲间的随机变化大大增加了干扰机侦收雷达信号的难度,同时更灵活地发射信号能够使雷达对干扰作出更有效的反应。然而,参数捷变的雷达体制严重破坏了脉冲的相干性,导致传统的MTD 算法失效。这意味着参数捷变雷达只能获得目标的距离信息,而无法对目标进行测速。为了克服这一问题,部分学者提出利用稀疏重构的方式实现参数捷变雷达的MTD 处理,包括基于传统的正交匹配追踪(OMP)等算法和基于距离-多普勒二维重构算法等。这些算法都取得了较好的MTD结果,但稀疏重构类算法需要庞大的运算量,不利于实时处理。因此,有必要提出具有更高效率的多参数捷变雷达MTD 快速算法。
综上,本文提出一种用于多参数捷变雷达的快速MTD 算法。该方法首先建立中心频率和脉冲重复频率同时捷变的信号模型,然后对该模型进行稀疏表示。最后利用快速傅里叶匹配追踪求解稀疏约束函数,得到目标的距离- 多普勒分布情况,从而实现MTD 的快速处理。仿真结果证明了本文方法在性能上优于传统的压缩感知算法,且运算量显著减少。
1 信号模型
为了保证较大的测距范围和较高的测距精度,雷达广泛采用线性调频信号作为发射信号。其表达式可以写为:


其中,sinc 表示辛克函数。考虑到对于一般的窄带线性调频信号,vt对回波包络的影响很小,因此,式(4)可以被进一步简化为:

对于传统的PD 雷达,回波的中心频率是固定值,因此,只需要对脉冲压缩后的回波在t域进行傅里叶变换,就能够实现MTD。而从式(5)可以看出,多参数捷变雷达的回波在经过脉冲压缩后,其相位变化情况十分复杂,因此,无法通过傅里叶变换实现MTD。
为了对回波进行稀疏重构,首先将其离散化。在雷达中,脉冲重复频率捷变一般分为重频参差和重频抖动两种,其中,重频抖动信号更难以被干扰机捕获。若式(5)中t为重频抖动体制,则其表达式为:


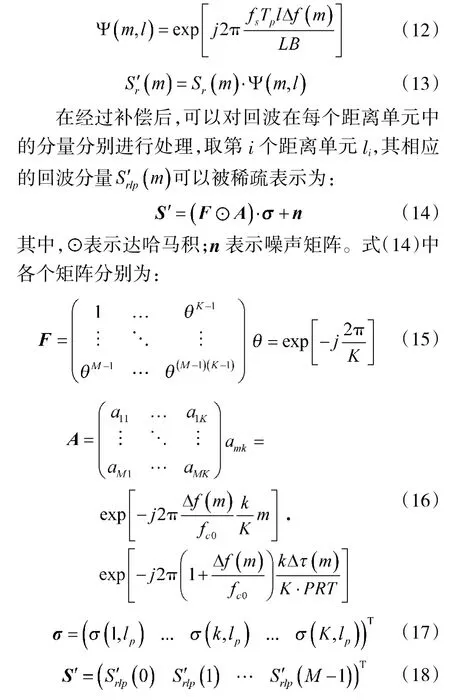
2 稀疏表示
在式(11)中,仅第3 个相位与l 有关。这意味着在消除该相位后,就能够对回波按各个距离单元分别进行处理,这有助于提高稀疏重构的精度和效率。构造补偿函数对回波进行补偿的过程中,由于构造补偿函数所需要的参数都是先验的,因此,这一步较为容易实现:

3 FFMP 算法介绍

k,k分别表示各次迭代中相似基所在的列数。
为了使迭代在合适的时机终止,有必要设置合理的迭代门限。考虑到使用固定门限可能会使不同情况下的重构质量存在较大差距,因此,设计一种自适应门限。确定回波总能量最大的距离单元,具体做法为:

其中,η 为终止条件,其典型值为0.005。
在迭代终止后,将σ'中的元素按k由小到大的顺序依次排列,若存在部分元素缺失,则在相应位置补0。对所有距离单元进行如式(20)~式(30)的循环处理,得到了雷达探测范围内所有目标的距离-速度分布,从而实现MTD。综上,基于FFMP 的多参数捷变雷达快速MTD 算法流程图如图1 所示。

图1 算法流程图
4 运算量分析
本节将分别分析传统SL0 算法和本文提出的FFMP 算法的运算量,以证明本文方法在运算量方面的优势。
在计算机中,乘法运算需要大量的计算次数,因此,可以将算法所需的总的乘法次数作为衡量算法运算量的标准。为了便于表述,设所有参与运算的矩阵和向量阶数均为N。以单次迭代为例,SL0 算法的运算量主要集中在解集更新上,其表达式为:

分析式(31),可得其总的乘法运算次数为4N,考虑到计算字典矩阵需要的乘法运算次数为N,因此,对于SL0 算法,其单次迭代的运算量约为:

结合上述分析,图2 给出了两种方法计算量随回波数据量的变化曲线。

图2 计算量随回波数据量变化曲线
可见,FFMP 算法的运算量显著小于SL0 算法,且随着回波数据量的增加,FFMP 在运算量上的优势愈加明显。
5 仿真验证
本节利用仿真目标验证算法的有效性。设仿真雷达工作在L 波段,共包含8 个频点,相应的频率值分别为:2 GHz,2.005 GHz,2.01 GHz,2.015 GHz,2.02 GHz,2.025 GHz,2.03 GHz,2.035 GHz。载频随着脉冲的改变在各频点间随机跳变。雷达脉冲重复频率中心为20 kHz,对于单个脉冲,其脉冲重复频率在23.5 kHz~17.4 kHz 间随机抖动。回波快时间采样率为80 kHz,脉冲宽度20 μs,带宽10 MHz,脉冲数201 个,快时间采样点数4 001 个。在201 个脉冲内,雷达载频和脉冲重复频率的变化情况如图3 所示。

图3 多参数捷变雷达参数随机变化情况
设雷达探测范围内存在3 个目标,其尺寸相对于雷达分辨率可被视为点目标,3 个目标分别位于距雷达2 km,3 km,4 km 的位置,其对应的速度分别为300 m/s,400 m/s,500 m/s。
在信噪比为20 dB 时,回波的一维距离像如图4(a)所示,采用传统MTD 算法得到的结果如图4(b)所示,采用SL0 算法进行MTD,得到的结果如图4(c)所示,采用本文方法得到的结果如图4(d)所示。

图4 方法对比
可见采用传统MTD 算法对多参数捷变雷达的回波进行MTD 处理时,仅能够得到一个目标的距离- 速度分布,且传统算法对该目标测速值为350 m/s,与真实值400 m/s 差距较大。采用传统的SL0 算法进行MTD 也仅能得到一个目标的距离-速度分布,但不同于传统的MTD 算法,SL0 算法对该目标的测速结果为403 m/s,与真实值基本一致。由于多参数捷变,使得脉冲间不再相参,导致基于傅立叶变换的传统MTD 算法失效。相比而言,采用本文方法进行MTD 处理,能够清晰地得到3 个目标的距离-速度分布,且测速结果分别为298.5 m/s,403 m/s,500 m/s,与真实值基本一致,证明了本文方法在提高运算效率的同时,能够准确检测出所有目标,验证了所提算法的有效性。
接下来验证本文方法在不同信噪比下的性能,当信噪比分别为-10 dB,-5 dB,0 dB 时,回波的一维距离像和MTD 结果如图5 所示。


图5 算法信噪比分析
可见,在信噪比较低的情况下,本文算法依然能够准确地获得3 个目标的距离-速度分布,且对目标的速度估计值在各个信噪比下均与真实值基本吻合。这证明了本文算法在低信噪比环境下具有较好的鲁棒性。
下面验证本文算法在部分脉冲缺失的情况下进行MTD 的性能。传统的PD 雷达信号参数固定,因此,十分容易受到干扰。相较之下,多参数捷变雷达在受到干扰时,通常仅有部分频点无法使用,因此,在进行目标搜索时,往往需要舍弃受干扰频点对应的脉冲。在信噪比为5 dB 的条件下,设2.02 GHz,2.025 GHz 和2.03 GHz 3 个频点因受到干扰被剔除,此时的回波距离像如图6(a)所示,采用本文方法对上述回波进行MTD 处理,得到的结果如图6(b)所示。

图6 脉冲缺失下算法性能验证
可见,当捷变频雷达部分频点受到干扰时,即使是在相当一部分脉冲缺失的情况下,本文算法依然可以有效对回波进行快速MTD 处理,且得到的结果与全孔径回波所得的结果保持一致。
6 结论
本文提出一种基于FFMP 的多参数捷变雷达快速MTD 算法。该算法首先对多参数捷变雷达的发射信号及回波进行建模和稀疏表示,然后通过FFMP 算法重构目标的距离-速度分布,从而实现对多参数捷变雷达的快速MTD 处理。本文算法的主要优点包括:1)相比于传统算法,本文算法解决了脉间回波的非相参难题,能够有效对多参数捷变雷达回波进行MTD 处理。2)相比于传统算法,本文算法的运算量显著减少,具有更高的运算效率。3)仿真实验证明了本文算法在低信噪比环境下的强鲁棒性和对于部分脉冲缺失时的良好适用性。