一种可重构视觉防错支架的设计与研究
2022-07-24廖益丰唐小凤陈桂平
廖益丰,唐小凤,陈桂平
(柳州铁道职业技术学院,广西 柳州545616)
0 引言
发动机是汽车的主要零部件,为了满足多品种小批量的生产方式,越来越多的厂商将自己传统的发动机装配线改造为柔性装配线[1]。柔性装配线需要在同一条装配线上装配多种不同型号的产品,为防止装配错误,工作人员需要对每种产品进行打码标记以便区分。目前多数机械制造业都采用针式打刻技术[2]进行打码,针式打刻机在更换型号时有可能会出现打码不够精确的现象,若检测不出来会使产品批量打码错误,造成巨大损失。为了较好地解决上述问题,尽可能规避各种缺陷和错误的产生,生产过程中的校验、测量和零部件识别技术受到越来越多的重视[3]。吉林大学对基于机器视觉的开关总成防错漏装系统进行了研发,该系统包括半自动引导模块及机器视觉检测模块[4];上海交通大学研究了汽车门内板总成焊接防错技术并设计基于光电传感器的门内板防错系统[5]。尽管视觉防错系统的研究已有了一定的热度,但能够通过构件重组来改变自身刚度和稳定性的视觉防错相机支架还研究较少。
设计适应性强且能通过构件重组的方式改变自身刚度和稳定性的视觉防错相机支架,其具有良好的应用前景。
1 视觉防错支架结构设计
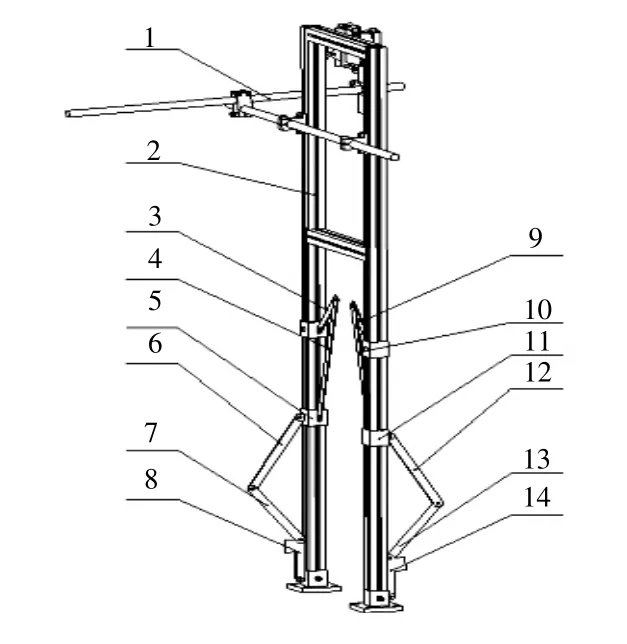
图1 视觉防错支架
相机调位组件安装在支架主体上,用于夹持相机并调节相机位置。第一连杆与支架主体转动副连接,第二连杆一端与第一连杆转动副连接,另一端与第一滑块转动副连接,第一滑块与支架主体移动副连接,第三连杆一端与第一滑块转动副连接,另一端与第四连杆转动副连接,第四连杆与第一底部支撑杆转动副连接,第一底部支撑杆与支架主体转动副连接,第五连杆一端与支架主体转动副连接,另一端与第六连杆转动副连接,第六连杆与第二滑块转动副连接,第二滑块与支架主体移动副连接,第七连杆一端与第二滑块转动副连接了,另一端与第八连杆转动副连接,第八连杆有第二底部支撑杆转动副连接,第二底部支撑杆与支架主体转动副连接。
该视觉防错支架可使视觉相机在空间中拥有六个自由度且调节范围较大,相机调位组件的结构示意图如图2所示。
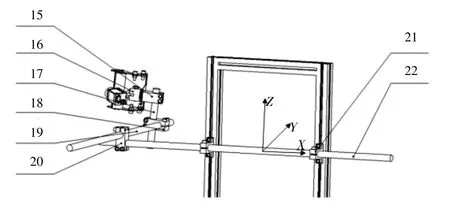
图2 相机调位组件结构示意图
第三光杆与第四连接支座和第三连接支座以圆柱副相连,使相机能够在X轴方向移动并能绕X轴转动;第二光杆与第三连接支座和第二连接支座以圆柱副相连,使相机能够在Y轴方向移动并能绕Y轴转动;第一光杆与第二连接支座和第一连接支座以圆柱副相连,使相机能够在Z轴方向移动并能绕Z轴转动。此外,相机与相机连接组件以球副连接,使相机具有极高的局部灵活度,相机连接组件如图3所示。
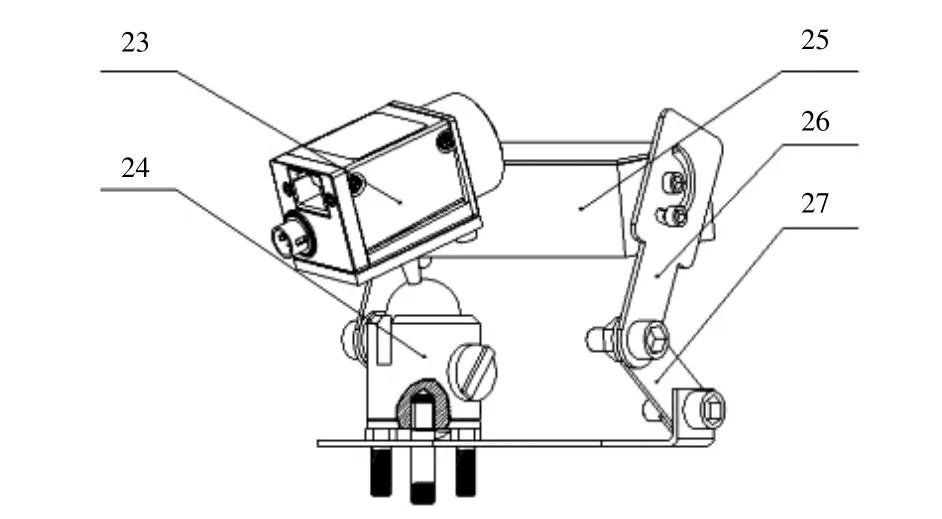
图3 相机连接组件结构示意图
2 支架重构分析
该视觉防错支架具有重构功能,拥有折叠构态和稳定构态,不仅可以适应狭窄的空间而且可以调节支架刚度和稳定性。
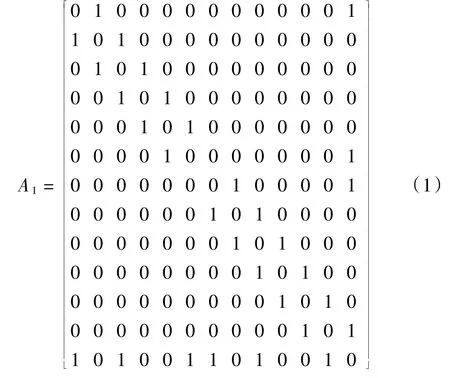
该支架处于折叠构态时,各连杆处于自然收缩状态,如图1所示。此时,支架下部的可重构的简图如图4所示。
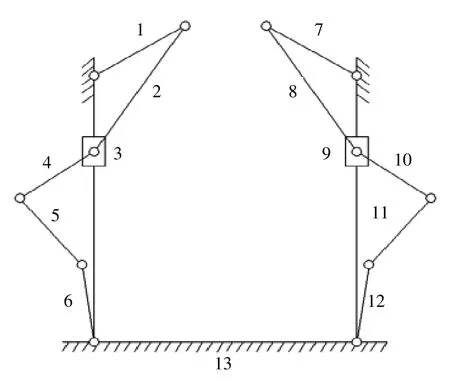
图4 折叠构态下简图
在折叠构态下的机构邻接矩阵[6]为:
我年轻时心高气傲,看不惯单位里的丑恶现象,多次公开抨击有关领导同事,自以为凭一身本事、一身正气就能光明正大得到应得的一切。在有关“评先”“评职”等“大是大非”问题上,“聪明人”四处打点张罗,忙得不亦乐乎。身边好友也屡屡劝我要主动出击,切莫错失良机。
采用CGK公式对折叠构态下的可重构进行自由度计算,CGK式[7]为:

其中:d为机构阶数;n为构件数;fi为第i个运动副的自由度数;g为运动副数;v为冗余约束数;ξ为局部自由度数。
该可重构支架尽管有部分构件在XZ平面内运动,有部分构件在YZ平面内运动,但它们均被限制在一个平面内运动,即XZ平面内的构件只能在XZ平面内运动,YZ平面内的构件只能在YZ平面内运动,该重构支架之所以在两个平面内有构件运动,仅仅是因为其连接角度不同而已,因此,该可重构支架的自由度计算方法可按照平面机构的方法来计算,故,折叠构态下自由度为:
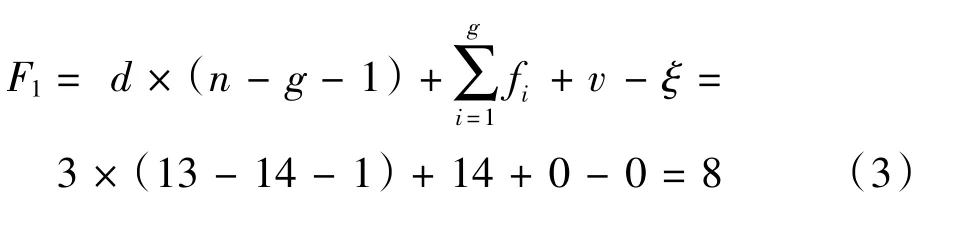
折叠构态下自由度为8,机构运动灵活,适应性强,占用空间少,可适应狭窄的空间。
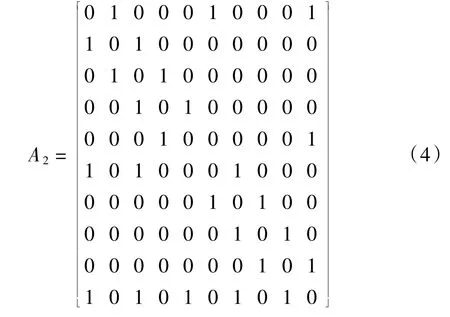
当支架需要增强刚度和稳定性时,第一连杆和第五连杆同时向下转动,带动第二连杆和第六连杆运动,进而推动第一滑块和第二滑块向下运动,第一滑块和第二滑块带动第三连杆和第七连杆运动,第三连杆和第七连杆带动第四连杆和第八连杆运动,接着推动第一底部支撑杆和第二底部支撑杆运动,最终使第一连杆和第五连杆合并,第一底部支撑杆和第二底部支撑杆与地面重合,此时,支架处于死点位置,锁死并处于稳定构态,其简图如图5所示。

图5 稳定构态下的支架简图
稳定构态下简图中的构件1与构件7合并,构件6和机架13合并,构件12和机架13合并,因此稳定构态下的邻接矩阵为:
在稳定构态下,可重构支架不仅具有多三角稳定结构,而且第一底部支撑杆和第二底部支撑杆与地面重合,第一连杆和第五连杆重合。当支架受到垂直于Y轴的力时,第一支撑杆和第二底部支撑杆处于死点位置,提高了支架在Y轴方向上的刚度和稳定性;当支架受到垂直于X轴的方向的力时,第一连杆和第五连杆处于死点位置,提高了支架在X轴方向上的刚度和稳定性。
3 运动学分析
该视觉防错支架底部具有可重构功能,能调节支架刚度和稳定性,上文已对其底部可重构和功能进行了分析。该支架除了可通过底部重构或调节刚度,还能保证相机调节组件有良好的灵活性和较大的调节范围,适应多角度拍摄。
3.1 正向位置分析
相机调位组件是空间结构,采用D-H参数法对其进行运动学分析,首先建立各构件坐标系,如图6所示。
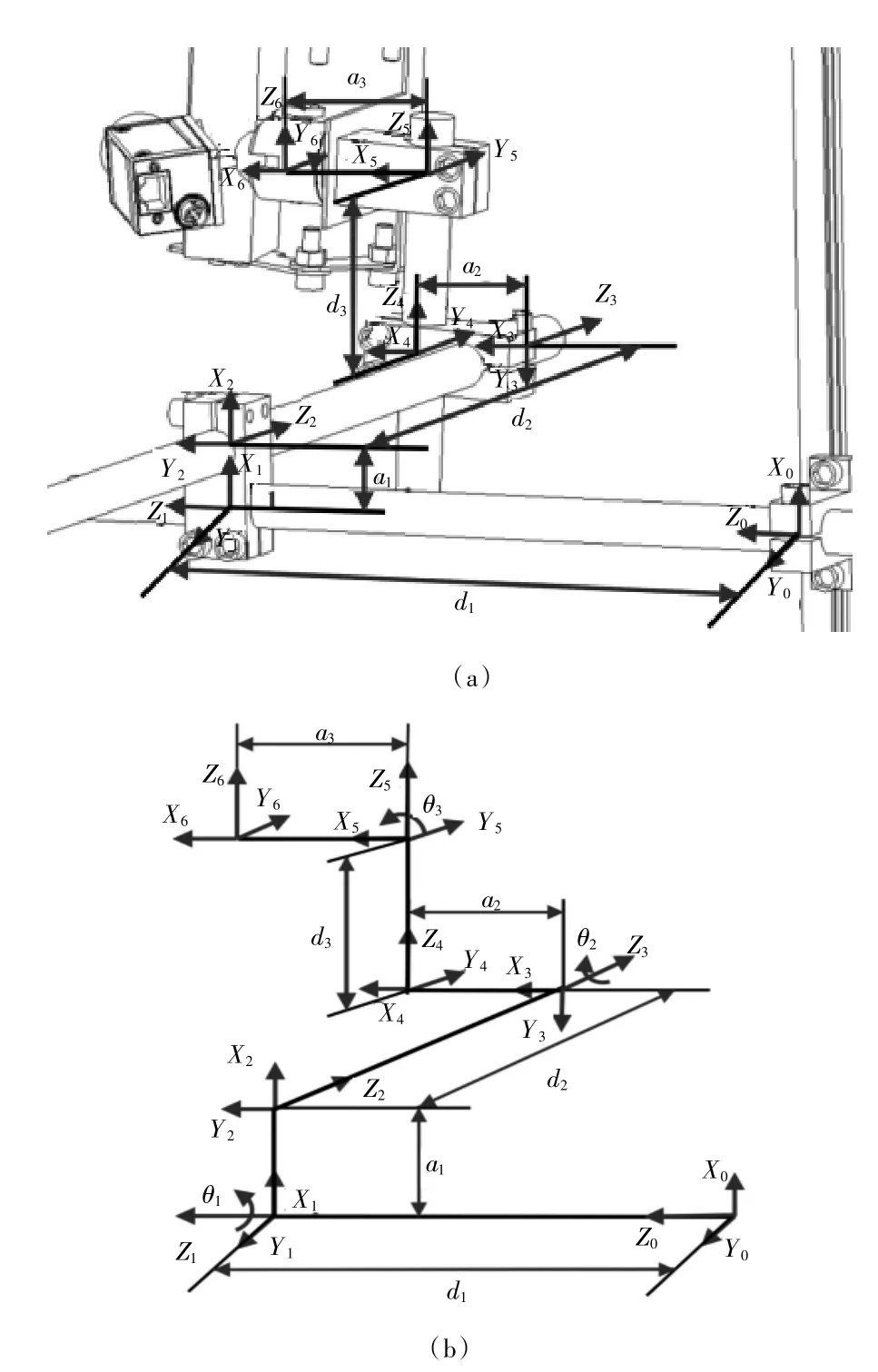
图6 相机调位组件坐标系
然后得到相机调位组件的D-H参数,见表1。
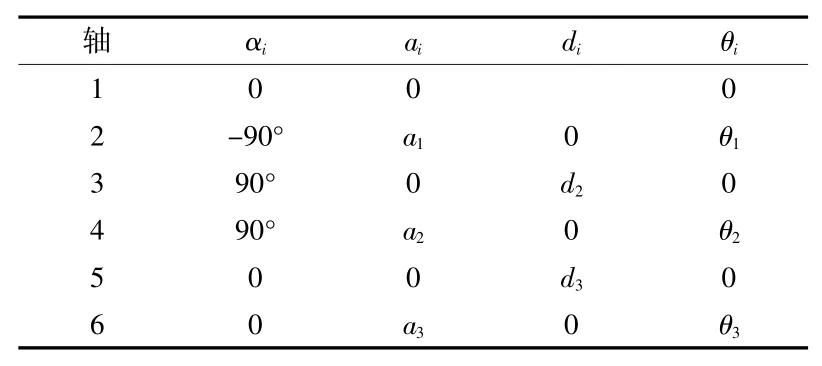
表1 相机调位组件的D-H参数
其中:ai为zi到zi+1之间的距离,αi为轴线间的转角,di为ai-1与zi轴线的交点到ai与zi轴线的交点的有向距离,θi为关节的转角。
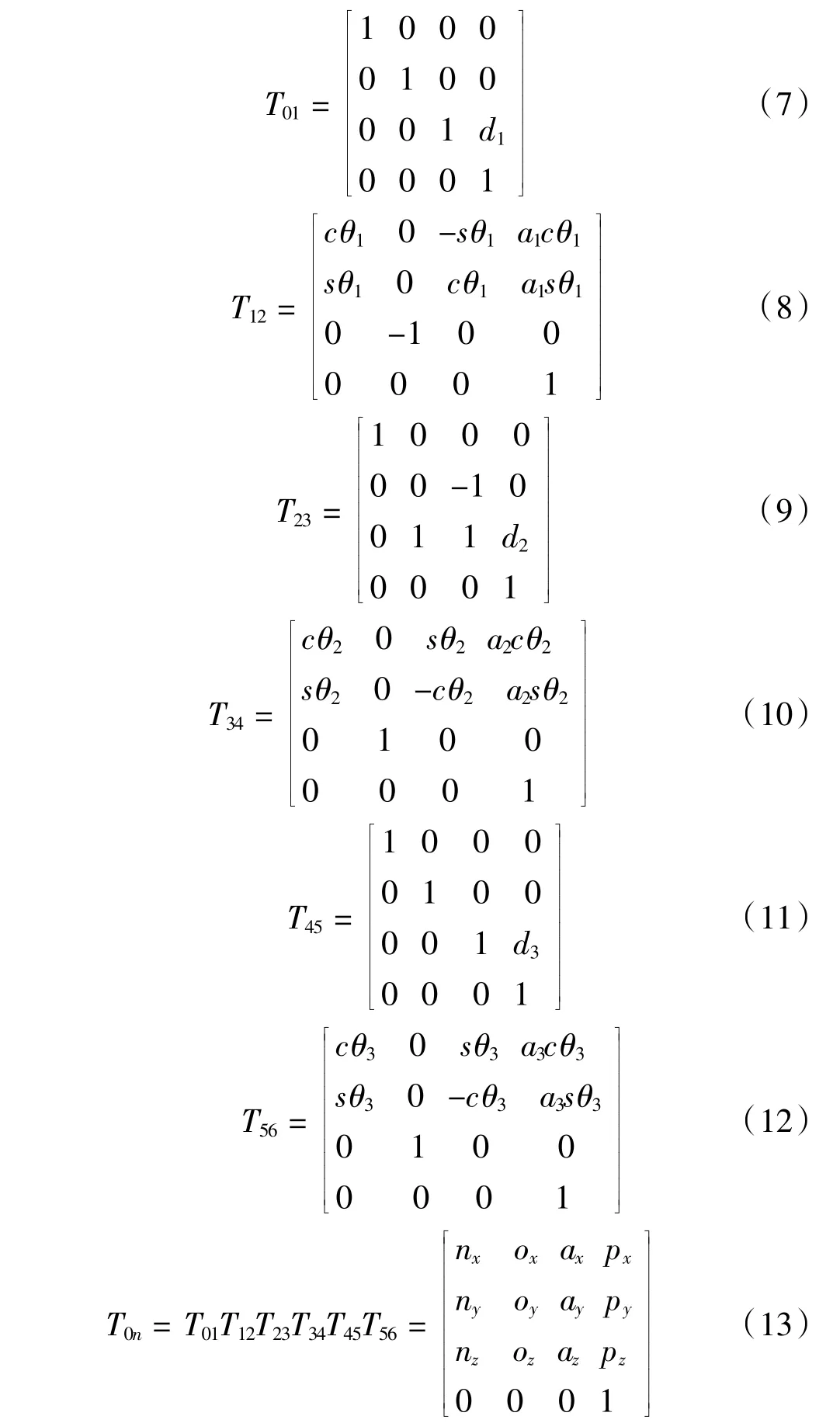
本研究采用坐标系后置的方法,变换矩阵为:
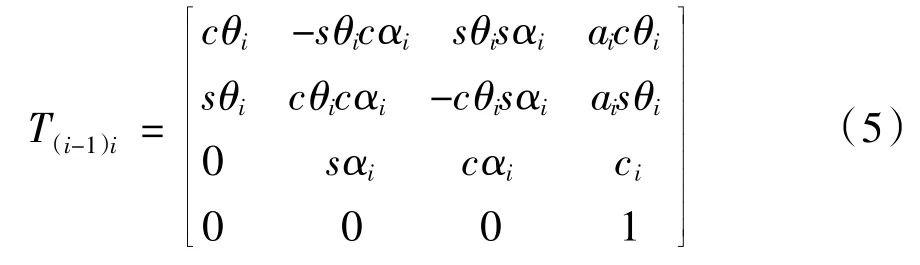
其中cθi为cosθi,cαi为cosαi
机构正解计算公式为:

根据公式(5)可计算得到:
其中:
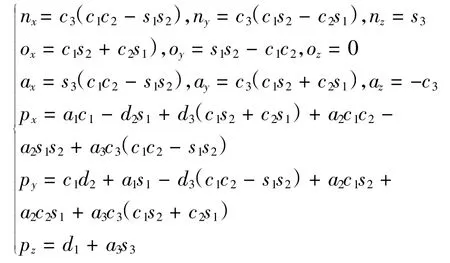
式中:s1=sinθ1,c1=conθ1,s2=sinθ2,c2=cosθ2,s3=sinθ3,s3=conθ3。
3.2 工作空间
上文得到了相机调位组件的正向位置方程,接下来对其进行数值仿真分析,求出其工作空间。
根据工程实际情况,取a1=a2=100 mm,a3=200mm,d1=[0,800],d2=[0,600],d3=[0,300],θ1=,采用蒙特卡洛法[8]对其进行仿真分析,得到其工作空间如图7所示。
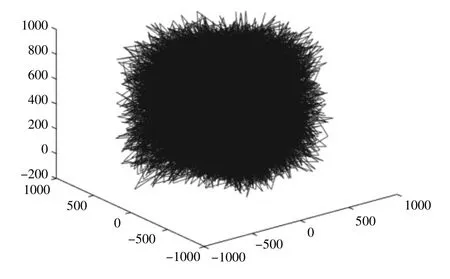
图7 相机调位组件工作空间
以上是对防错支架的分析,该支架的实际三维模型如图8所示。
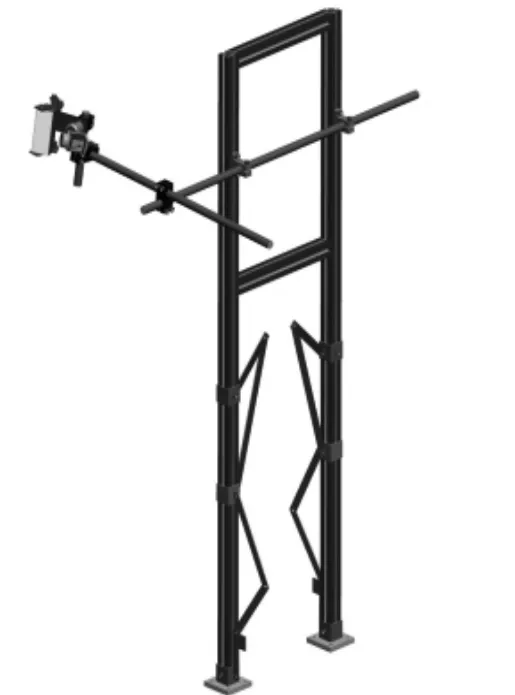
图8 防错支架三维模型
4 结语
(1)针对现有视觉防错相机支架,灵活性低和稳定性不可调等问题,提出了一种可重构视觉防错相机支架,该相机支架可根据不同的工作需求灵活调整视觉相机方位和支架刚度。
(2)分析了该视觉防错支架各构态下的邻接矩阵并计算了其自由度。
(3)采用D-H参数法建立了相机调位组件的正向运动学方程并采用蒙特卡洛法对其工作空间进行了仿真分析。
