智能分类垃圾桶
2022-07-23上海工程技术大学陈芃均侯丽萍
上海工程技术大学 李 斐 陈芃均 侯丽萍
1 研究背景
早在2004年中国就已经超越美国成为世界第一垃圾制造大国,而且中国目前全国生活垃圾年产量为4亿吨左右,并以大约每年8%的速度递增。面对垃圾污染,人们也采取了卫生填埋、焚烧、堆肥等无害化处理,但其中部分方法仍会造成环境污染(例如:焚烧、填埋)。近年来,垃圾提倡分类投放,分类处理,垃圾分类有一下几点优点:第一、去掉可回收的、不易降解的物质,减少垃圾数量60%以上,减少占土。第二、分出有害垃圾,减少污染。第三、可回收垃圾可变废为宝。第四、减少废塑料被动物误食的风险。
处理垃圾污染迫在眉睫,如今我国多数城市已经开始实施垃圾分类政策,而由于相关知识的普及难免不够全面,垃圾桶内总有垃圾错误投放的事情发生,所以为提高垃圾投放的正确率,本项目将设计一款智能分类垃圾桶。
智能分类垃圾桶的种类有很多,目前比较常见的智能分类垃圾桶有以下几种:
(1)智能垃圾分类亭(见图1)

图1 智能垃圾分类亭
这种分类亭一般放在社区,有专门的人员进行监督管理。它通过投放人员输入所带垃圾的名称打开相应的垃圾桶来进行垃圾分类。
(2)基于云端的分类垃圾桶(见图2)

图2 基于云端的分类垃圾桶
目前这种垃圾桶形式比较多,但考虑到其基于云端,所以后面的普及工作将不会很顺利。
为响应垃圾分类政策,智能分类垃圾桶的开发在近年来热度比较高,但目前所见的智能分类垃圾桶大致为上面两种,但这两种在实际应用中仍然存在一些问题。例如,智能化程度不够高,这主要针对第一类垃圾桶,它的智能分类能力主要体现在,可以根据投放者所说的垃圾打开相应的垃圾桶。但如无人监督,投放者可以将各种不同垃圾投放到同一个垃圾桶中,这并不能达到分类的目的,况且,这种垃圾桶由于体积的问题,将其安放在街边是不现实的;第二类垃圾桶符合当今万物互联的理念,并且借助互联网可以较第一类垃圾桶更为智能地实现垃圾分类。而这类垃圾桶由于互联网而方便,同时也受到互联网的牵制,从而导致其在普及方面存在困难。
2 设计方案
2.1 总体设计方案(见图3)

图3 总体设计方案
2.2 硬件方案
(1)主体结构
该垃圾桶内有四个分类舱:可回收垃圾、厨余垃圾、有害垃圾、干垃圾。其中由于有害垃圾在日常生活中的产量比较少所以将该智能垃圾桶的电源部分、控制芯片部分放在有害垃圾舱下部的分舱里(如图4所示)。在垃圾通的上部是用来分类的分类盘。当下位机接收到上位机的分类结果后,分类盘将在下位机的作用下完成分类,设计好的垃圾桶模型如图5所示。
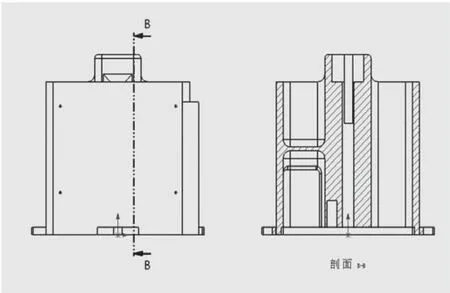
图4 有害垃圾舱的布局

图5 垃圾桶模型
(2)分类盘结构
基于模型的分类盘设计是直径为200mm的圆形结构,将该圆形的1/4扇形设置为可动底部(下文中称该可动底部为挡板),挡板可以在舵机的带动下开合,从而实现将分类盘中的垃圾丢入垃圾桶中的目的(分类盘的3D模型见图6)。
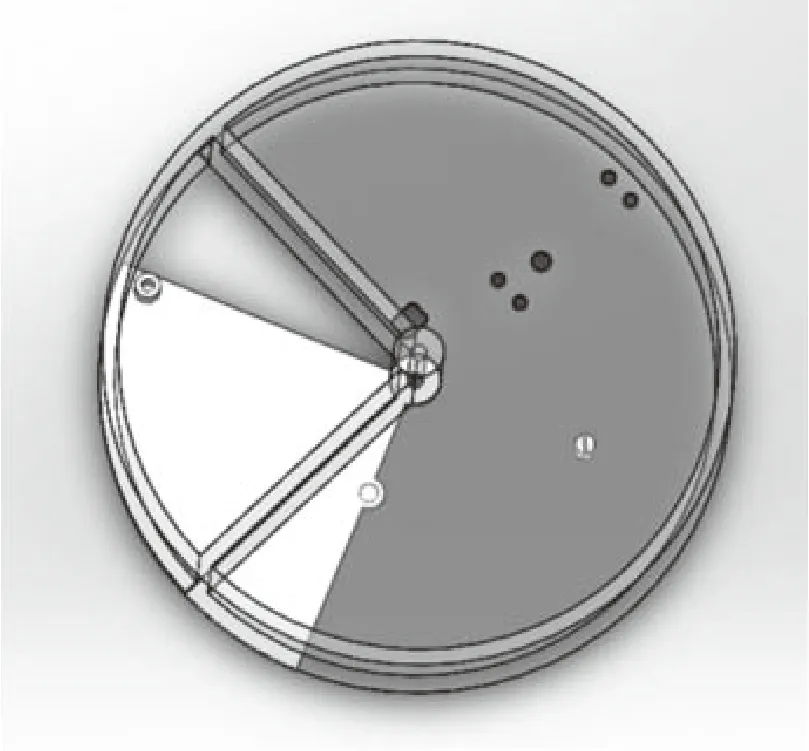
图6 分类盘的3D模型
(3)垃圾分类的机械设计
该垃圾桶(模型)分类的主要机械部分由17HS4401步进电机、舵机和连杆构成。步进电机的作用是将分类盘的1/4空缺部分定位到将要投掷当前盘中垃圾的垃圾舱上方。当电机完成定位后,由舵机拉动连杆,再由连杆控制挡板开合使得垃圾掉入对应垃圾舱内,该部分的3D模型见图7。
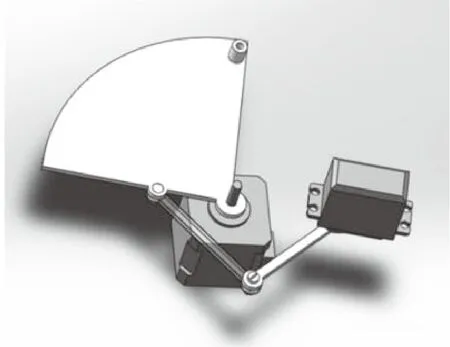
图7 分类机械设计
2.3 软件方案
(1)识别模块
本产品的识别部分是由YOLO v4视觉识别网络实现的,识别功能属于该产品的上位机功能,所以被部署于Raspberry pi上。YOLO v4属于深度学习的一种,所以其识别需要基于相应的训练集才能完成。我们的训练集是生活中各种常见的生活垃圾,这些垃圾的图片可以通过python进行网上爬取。得到爬取到的照片后利用LabelImg软件对图片打标签,从而生成算法可以识别的.xml文件。将生成好的.xml文件导入算法进行训练,当loss值十分低时即可利用对应的模型进行识别。训练好的模型对主程序提供一个接口,方便后期的维护和部署。
(2)满检模块
为了显示垃圾桶的满载情况,该产品利用VL53L1X激光测距模块实现了垃圾桶的满检模块。该模块采用IIC通讯,将此模块部署于垃圾桶的挡板下部。当垃圾完成投放后,由Arduino控制的激光测距模块对相应的垃圾舱经行测距,利用得到的测距结果与空垃圾舱进行比值计算即可得到当前垃圾舱的满载量。Arduino将计算出的满载量上传到Raspberry pi中,最终将由显示屏将每个舱的当前满载量显示给客户。
(3)机械控制模块
主要的机械控制模块由下位机Arduino控制电机和舵机完成。所控制的电机为步进电机,该步进电机的步进角为1.8°,即一个脉冲对应电机转过1.8°的角。为了增加电机转动过程中的稳定性,外部采用电机驱动模块将步进角进行细分,当细分值为8时,电机的转动稳定性已经满足要求。利用Arduino的P13脚来进行产生脉冲,所有产生的脉冲数量由上位机产生的垃圾分类结果决定,具体的决定方式:例如,有害垃圾需要转的角度为90°(转角方向由电机驱动模块DIR脚的高低电平决定,该脚的高低电平由P12脚提供),这可以通过程序中的公式Num=angle*8/1.8来获得所需要产生的脉冲数。当电机转到相应位置后,利用Arduino自身的Servo库产生90°对应的PWM,此时即可以控制挡板的开合实现垃圾的投掷。
结束语:本文设计了一种占用空间小(方便普及,但可以通过需求来调整垃圾桶体积)、无人操作的智能分类垃圾桶设备。该设备通过单片机、树莓派和深度学习来完成垃圾分类工作。由于基于深度学习的图像识别技术是事先训练好的,所以在后面垃圾桶识别过程中不需要用到网络,这种设计主要是针对上面提到的第二类垃圾桶由于依赖网络而普及困难的问题提出的。另外由于它的分类不需要人员监督,可以在一定程度上节省实现垃圾分类的人力。这种垃圾桶的实现将具有推动垃圾分类政策普及和提高分类正确率的实际价值。
