机器人技术在烹饪智能化中的应用价值
2022-07-23葛安同殷毓灿
刘 俊 葛安同 查 理 曹 凯 殷毓灿 陈 猛
(1.国网扬州供电公司,扬州 225000;2.国网扬州综合能源服务有限公司,扬州 225000)
随着机器人技术的进一步发展,美国著名机器人研究员英格伯格,在1980年首次提出将此项技术应用到烹饪领域[1]。烹饪机器人不仅需要具有主动识别不同菜品的能力,还需要具有完善的烹饪程序与无差错的烹饪技术流程[2]。中国美食历史悠久,现阶段已有一些科研单位设计了可用于辅助烹饪的智能机器人。在将设计成果正式投入使用过程中发现,设计成果存在3点集中性缺陷:智能烹饪模块无法执行过于复杂的动作,要满足多元化菜肴的制作,还需要投入大量资金调试程序;烹饪过程智能化程度低,一些程序仍需要人工参与;机器人体积过大,不适用于在市场内广泛推广使用。为了解决上述问题,全面落实烹饪智能化计划,本文将开展机器人技术在烹饪智能化中的应用研究,以期为我国在智能化领域的相关研究提供技术指导。
1 机器人技术在烹饪智能化中的应用
1.1 烹饪智能化终端设计
为更好地实现基于机器人技术的烹饪智能化设计,需要在开展相关设计研究前对烹饪智能化终端展开设计。结合烹饪作业需求,选择基于工控机设备的上机位操作端与可编程控制的下机位操作端作为智能终端。前者主要用于存储不同烹饪菜品的数据、菜单材料投放比例数据等,后者主要用于控制传感器、执行机械、电机设备等。为了确保控制过程的全自动化与全智能化,全面优化终端部署[3]。
为了满足烹饪智能化设计需求,需要在配置终端时科学部署不同资源层。经过系统设计,需选择大于10台的直流发电机(对每台电机进行综合调速控制)、大于3台的步进发电机以及采用通信串口。考虑到在此过程中需要控制的技术参数较多,使用单一结构的单片机无法满足对多个终端控制器的同步控制需求,本文设计优选数字信号处理(Digital Signal Processing,DSP)+复杂可编程逻辑器件(Complex Programming Logic Device,CPLD)终端作为支撑,将此终端集成在烹饪机器人中,以保证机器人结构与行为的灵活性。同时,考虑到智能化终端的安全性需求,可在火控单元专设一个单片机,将其与智能化控制终端隔离,为整体顶层设计提供一个相对良好的控制与操作环境[4]。
1.2 基于机器人技术的烹饪搅拌机构行为优化
搅拌机构是烹饪智能化中的主要构成,也是机器人技术的主要控制对象。为了实现对烹饪搅拌机构行为的智能化,引进机器人技术中的离散元思想,结合分子动力学原理,建立机器人烹饪动力学行为方程[5]。此过程要确保每个烹饪行为都满足牛顿第二定律。假设机器人执行操作的步进长度为y,接收指令到执行指令的时间为t,则基于机器人动力学角度智能化烹饪过程中的搅拌行为进行建模,表达式如下:
式中:Iy为智能化烹饪过程中搅拌行为的步进长度;M为动力学不平衡力矩;i为支撑结构承重点;β为整体结构阻尼系数,计算单位为N·s·m-1;g为动力学平衡力矩;ω为烹饪搅拌机构行为增量。
为避免在搅拌过程中不同结构出现行为方面的碰撞,可在设计过程中根据机器人机械运行原理与其不同部位的最大角速度构建机器人动力学三维模型,将所有结构的最大旋转角度以中性格式导入动力学软件,定义此时执行烹饪行为的边界条件、模拟参数量。将定义的数值按照标准导入式(1),当计算公式中的动力学参量之间不发生冲突时,说明此时设计的搅拌行为参量符合标准,可以满足机器人辅助烹饪智能化操作需求[6]。反之,当设计参量不符合实测关系或动力学参量之间存在冲突关系时,说明此时设计的搅拌行为参量不符合标准,需要继续进行参数调整,并重复上述步骤,直到设计的参量符合机器人动力学运动标准。
1.3 基于互联网的烹饪智能化功能模块布局
完成上述相关设计后,引进互联网技术进行烹饪智能化功能模块布局设计。在此过程中,可采用Visual Basic程序编译工具,对烹饪智能化过程中的翻炒功能与材料旋转功能进行动力学仿真,在操作软件中模拟不同烹饪行为的运动轨迹。同时,将机器人结构的偏转角度、行为速度等参数采用系统化编译的方式录入烹饪智能化程序之中。根据目标选择设计中的最优参数,确保多个功能模块在操作中可以达到最优状态。
按照上述方式对不同功能模块进行编译与布局,以确保不同单元可以按照预设的指令达成指定功能。
2 应用价值分析
为证明此次设计研究的基于机器人技术的烹饪智能化方法在实际应用中具有较高的市场推广价值,下面将采用将设计成果应用到真实作业环境的方式进行设计成果的全面检验。
为了确保此次实验的真实性,选择市场内某个星级餐厅作为此次实验的参与对象。根据技术人员对实验现场的勘察与走访可知,该餐厅已初步实现了将智能化技术应用到烹饪制作环节。但是,由于该餐厅资金链不足,无法实现对更先进的设备与技术的引进,导致此餐厅的智能化烹饪制作模式设计止步不前。
以该餐厅的鱼香肉丝菜品为例,在餐厅后厨制作区域按照设计的方式进行规划布局,包括设计烹饪智能化终端、初始化并优化烹饪搅拌机构行为、在烹饪区域联网布局等。完成对烹饪场地的设计后,准备如表1所示的菜品烹饪食材。

表1 烹饪菜品基础食材制备
完成对烹饪菜品基础食材的准备后,安排专业厨师在机器人控制终端输入指令。指令内容包括里脊肉的切丝、蔬菜的清洗、不同调味剂与调料的添加与加量控制。完成对指令的输入后,启动智能化终端,在机器人技术的支撑下前端开始自动进行菜品的烹饪制作。此时,技术人员可以通过传感器反馈的烹饪操作信号进行机器人智能化指令的调整。
为了更好地评估其价值,选用基于人工智能(Artificial Intelligence,AI)技术的烹饪智能化方法作为传统方法。操作智能化终端使用机器人技术与AI技术进行菜品的烹饪。完成对菜品的制作后,选择由10名专业烹饪人员组成的评定小组,对两种技术烹饪的菜品进行品尝打分。为了确保评分结果的完全量化,设定针对鱼香肉丝菜品的4项评定指标,分别为外观指标、气味指标、滋味指标与口感指标。对评价指标进行量化与分值设定,具体内容如表2所示。
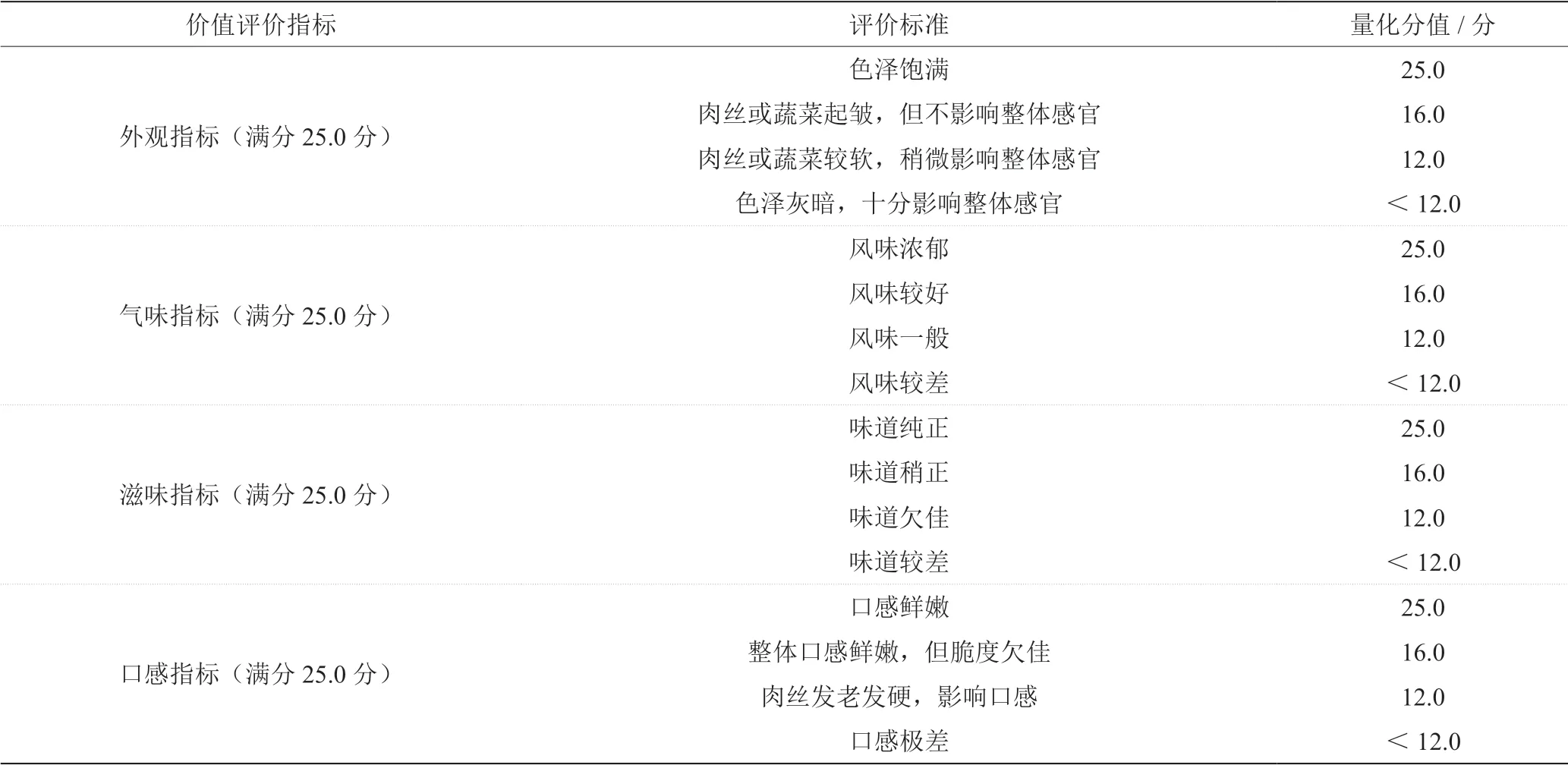
表2 两种技术烹饪菜品感官评分标准
在品尝过程中,专业人员需要依次品尝制作成品,完成一次品尝并给出得分后,使用淡绿茶进行漱口,再进行下一次品尝,直到完成对菜品各项指标的量化评分。统计两种技术烹饪菜品每项得分的平均分作为最终得分,如表3所示。
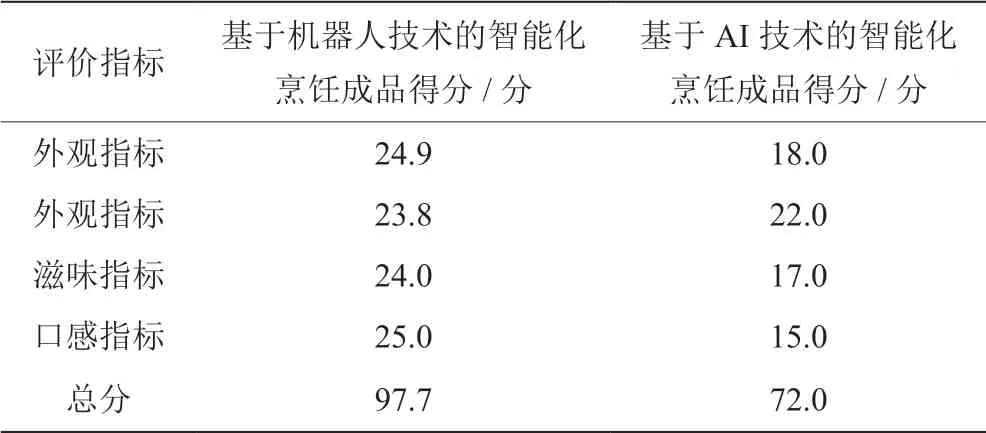
表3 两种技术烹饪菜品感官得分结果对比
通过表3的实验结果可以看出,基于机器人技术的智能化烹饪方法制作的菜品的各个项目的评分,均高于基于AI技术的智能化烹饪成品得分,说明机器人技术在烹饪智能化中的应用价值较高,可以将此项技术代替AI等现代化技术在市场内广泛推广使用。
3 结语
1954年,美国乔治设计了世界上第一台数字化机器人。此机器人的操作与运行由电子程序支撑,自此项设计成果被提出,机器人技术便开始在市场内不同生产领域中广泛应用,包括工业领域、机械作业领域以及危险性较强的工作领域等。使用机器人辅助或代替人类的行为,可以实现对现有人力资源的节约。为了进一步落实机器人代替人工烹饪的方法,需实现此项技术在更多领域中的广泛使用。本文从烹饪智能化终端设计、基于机器人技术的烹饪搅拌机构行为优化、基于互联网的烹饪智能化功能模块布局3个方面,开展了机器人技术在烹饪智能化中的应用研究,并通过实验证明了提出的技术在实际应用中具有的市场价值。
