某船用导航雷达接收机调试项目的研究
2022-07-23周志军侯淑芳
周志军 侯淑芳
(江苏航运职业技术学院,南通 226010)
近年来,我国经济突飞猛进,带动了造船业迅猛发展。相对于欧洲、日本等,我国的船舶电子设备装船率很低,尤其是船舶导航雷达。船用导航雷达是船用导航设备重要的组成部分,一般由天线、发射机、接收机、数字信号处理以及显示设备等组成。通过对外发射固定频率的电磁波来检测回波信号,并结合其他导航设备和传感器获取数据。它的核心部件接收机主要分为接收前端与中频处理两个部分。其中,性能指标应满足设计要求,以达到接收高质量雷达回波图像的目的。
1 船用雷达导航系统HLD-RADAR 900/900C介绍
海兰信船用雷达导航系统HLD-RADAR 900/900C系列产品通过了CCS/DNV-GL船级社工厂认证,支持符合IMO/SOLAS公约和最新雷达系统规范(IEC 62388—2013)的标准。它具有独立的雷达海图,可作为备份ECDIS使用;支持中、英文界面;最多可捕获100个雷达目标,后台自动跟踪最多达10000个;最多支持100个激活船舶自动识别系统(Automatic Identification System,AIS)目标,总共支持1000个AIS目标(包括激活状态和休眠状态的AIS目标);支持AIS目标和自动雷达标绘仪(Automatic Radar Plotting Aid,ARPA)目标融合;支持电子航海图(Electronic Navigational Charts,ENC)。HLDRADAR 900/900C主要技术参数如表1所示。
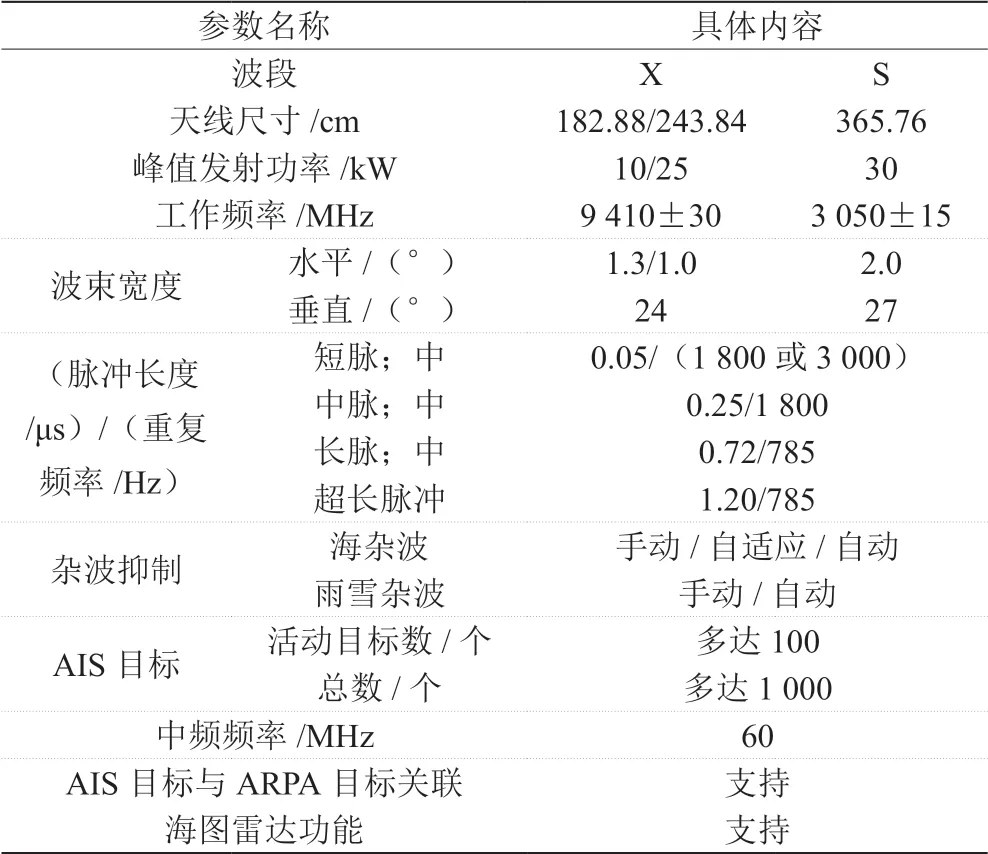
表1 HLD-RADAR 900/900C系列船用雷达导航系统技术参数
由表1可知,HLD-RADAR 900/900C船用雷达导航系统工作波段以X波段和S波段为主,采用4段脉冲调制的工作方式,工作频率分别为(9410±30)MHz和(3050±15)MHz。前者有较高的方位分辨力,有利于近距离探测;后者受雨雪杂波和海浪杂波的干扰较小,电磁波经过雨区的衰减也小,有利于远距离探测。
2 雷达接收机调试必要性分析
2.1 雷达接收机结构组成
船用导航雷达对远近距离有不同的需求。近距离时,它要求目标精准度更高;远距离时,它要求目标回波信号幅度要大,具有发现小目标能力,作用距离远。HLD-RADAR 900/900C船用雷达导航系统雷达接收机采用一级变频超外差的结构方式。
接收机包括射频接收前端和中频放大检波两个部分。射频接收前端主要将射频信号变频至中频,主要由限幅器、低噪声放大器、抑制混频器以及本地振荡器等组成。中频放大检波则将中频信号进行信号滤波、放大及解调等,最后检波输出得到视频信号。它主要包括中频放大器、中频滤波器、对数放大器及视频放大器等。HLD-RADAR 900/900C船用导航雷达接收机结构,如图1所示。
2.2 雷达接收机调试必要性分析
船用导航雷达接收机的主要作用是从众多电磁波信号中检测所需的有用信号,并无损放大有用信号,再由检波器检波将输出视频脉冲等信号传输到终端设备[1]。电磁波在空间传播过程中,由于空间传播的多径效应,传播过程中介质损耗较大,且目前电磁环境复杂、远目标回波微弱等因素,导致雷达接收的回波信号出现干扰信号比有用信号强的情况[2]。
这里以HLD-RADAR 900/900C船用雷达导航系统接收机(以下简称RCV)的调试过程为研究对象。通过对接收机RCV电路板进行4波段的脉冲调试,获取实际数据并计算分析,以提高接收机的高灵敏度和动态范围,使得雷达接收机同时具备处理近距离目标强反射和远距离微弱回波信号的能力。在雨杂波和海杂波的干扰下,调试人员需要着重测试抑制带外噪声的匹配滤波器。为了优化性能,需要不断调试脉冲波的一些参数与设计,确保优良的中频滤波器的稳定输出与工作,使得灵敏度等特性符合要求。
3 雷达接收机RCV调试准备
3.1 仪表工装
调试实施前,调试人员需要确保所需的调试器材。所有的测试仪器仪表都需要校正,且在12个月的有效期内校正。同时,调试人员需要检验计算机软件、工装线缆以及接头等辅件,确保一切准备到位[3]。
接收机主要调试工装如下:安装好调试软件和配有422串口的计算机;信号发生源和矢量网络分析仪;示波器(350 MHz带宽);双路电源;数字万用表;专用SMA测试线;波导转N型接头;N型射频连接电缆。
使用示波器测量视频信号时,需要匹配75 Ω负载;在焊盘上焊一根地线,以便调试过程中示波器接地;工装和接地线不用时,使用绝缘胶带包襄,以免对印制电路板(Printed Circuit Board,PCB)造成伤害。
3.2 RCV接收板硬件检查
调试人员需要检查电路板外观情况,查看元器件是否出现有错装、多焊、漏装、错连以及歪斜松动等现象[4]。RCV接收板各主要调试点见表2,实物结构图和调试点如图2所示。
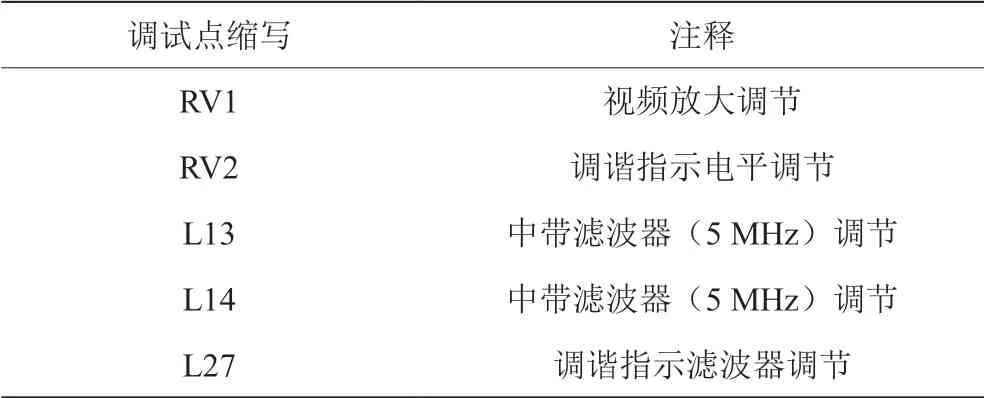
表2 RCV接收板主要调试点介绍
调试人员测量并核实元器件额定值,重点检查电容、二极管及三极管等有极性要求的元器件,如钽电容和铝质电容等,确保每个元器件值正常。
3.3 静态电源检查
通电前,调试人员需要检查电路板电源,以免出现短路情况[5]。短路测试点如表3所示。

表3 短路测试点介绍
4 雷达接收机RCV调试过程
4.1 调试步骤
电路板调试按照如图3所示的步骤流程逐步测试。测试前准备记录单记录相关测试数据,并分析所记录的内容是否符合要求。
4.2 RCV接收板设置
RCV接收板在测试前先将IF测试点和GND(电线接地端)连接SMA测试线(焊接时不通电、不连接仪表)。信号源通过SMA测试线连接到RCV接收板,如图4所示。
所有仪表在使用前需要先开启电源预热30 min,电路板预热30 min。RCV接收板输出的视频信号通过示波器探头连接输入示波器,其中示波器需要设置为75 Ω匹配输入。RCV接收板使用的电源电压范围见表4。

表4 RCV接收板电压范围
4.3 滤波器调试
滤波器先匹配滤波中频信号,实现最大信噪比输出,中频放大器再将中频信号放大到检波器正常工作所需要的功率。输入信号BWO和BW1调试设置见表5。其中,输入信号状态部分,1表示悬空,0表示接地。

表5 BWO和BW1调试设置
4.3.1 20 MHz滤波器调试
(1)设置信号源频率为60 MHz,功率为0 dBm,模式为CW,开环。调试人员先观察示波器,打开信号源RF开关,确保IF信号输出为60 MHz±1%。若IF信号大于800 mV(管脚空接),则关闭RF。 20 MHz滤波器CW开环调试过程见表6。

表6 20 MHz滤波器CW开环调试
(2)设置信号源频率为60 MHz,功率为0 dBm,模式为PW,闭环。脉宽为800 ns±1%,脉冲周期为1 ms±3%,打开信号源RF开关。
BW0接GND、BW1悬空状态,此时接收机处于20 MHz滤波器状态,调整RV1使VIDEO信号达4.3 V 左右。若信号小于500 mV,则信号源功率调整到-85 dBm, 查看是否被噪声淹没,并记录最佳状态数据。
信号源功率衰减时,信号幅度同样在减弱。为保证功率为0 dBm,信号幅度最大。例如,功率为-30~0 dBm 时,信号幅度增加。因此,在-30 dBm调节噪声幅度,然后回到0 dBm,重新调节VIDEO信号。20 MHz滤波器PW闭环调试过程见表7。

表7 20 MHz滤波器PW闭环调试
4.3.2 5 MHz滤波器调试
5 MHz滤波器使用矢量网络分析仪进行调试。首先,仪器开机后进行双通道校准,频率范围选择55~65 MHz。校准时,直通量校准使用专用工装线缆。校准后先设置测量为S21,格式为插入损耗,Scale设置为2,Position设置为5,Level设置为-8。显示器显示差损为0 dB,校准后在Port1接入20 dB衰减器,Scale设置为5,此时测试插入损耗接近-20 dB,至此矢量网络分析仪校验结束。
功率设置为0 dB,选择BW1接GND、BW0悬空状态,此时接收机处于5 MHz滤波器状态,专用线分别焊接AB和EF处。其中,A为输出GND,B为输出IF,E为输入IF,F为输入GND。线缆焊接完成后,E端连接Port1,B端连接Port2,保持Port1连接20 dB衰减器,然后电路板上电后节D处的L13和L14。
4.4 调谐指示调试
首先,设置信号源频率为60 MHz,功率为0 dBm, 模式为CW,观察示波器;设置信号源频率60 MHz,功率为0 dBm,模式为PW,脉宽为800 ns±1%,脉冲周期为1 ms±3%,打开调制和射频。
其次,RCV接收板上电,GATE_TUNE管脚接GND。通过调节RV2和L27使得LED指示灯亮,并找出TUNE_IND输出小于5 V电压中的最大值(电位器RV2调节到最小后,再调节L27并找到最大调谐指示电压输出,最后微调V2使调谐指示电压输出不大于5 V)。
最后,增加频率或者减少频率,TUNE_IND的电平值均会下降。调试该步骤时,设置信号源频率调节步长为1 MHz,保证60 MHz时输出电平最大。调谐指示调试过程见表8。

表8 调谐指示调试
如果TUNE_IND输出异常,检查Q3、Q4、TP5、Q6、TP6、Q7及U7等输出信号。将测试完的RCV单板安装到整机,之后需要微调点蜡。
5 雷达接收机RCV调试常见故障及解决方法
5.1 接收机灵敏度损失,闭环跟踪电压不够
可能原因:调谐指示电路手动和自动的调整电压值不匹配,调谐放大器的L27频率有误,增益设置 不当。
解决方法:重新调整RV2和校准TUNE REG电压值。
5.2 接收机无视频信号输出,且无噪声电平
可能原因:射频前端和中频单元故障或者电源 故障。
解决方法:排除电源故障或更换前端。
5.3 接收机灵敏度不够
可能原因:接收机本振频率调节电压不正确、中频前置放大器增益太低、接收机中频滤波器选择不正确、对数中放U2烧毁或者对数中放U4的噪声 过大。
解决方法:重新调整VCO调节电压(使得IF频率为60 MHz),检查前置中频放大器Q1和Q2有无故障,检查滤波器带宽和滤波器选择电路,检查对数中放U2器件是否损坏。
5.4 动态范围过小
可能原因:对数中放U4烧毁、视频放大器U5增益过大。
解决方法:确定U4损坏后,更换元器件,重新调整电位器V1,降低U5增益。
5.5 回波信号失真
可能原因:电位器RV1调整不正确。
解决方法:重新调整电位器值,使得视频放大器不饱和。
6 结语
雷达接收机属于模拟器件的结合。调试过程中,调试人员需要严格按照调试步骤执行,调试完成后总结和填写调试报告,不断累积经验,以便后续调试。调试过程中需要注意,记录数据必须及时,对其进行动态分析与调整,确定是否符合IMO/SOLAS公约和最新雷达系统规范(IEC 62388—2013)的标准要求及技术规范。若有不符合的项务,必须及时解决。
