惯性测量单元MPU6050的随机误差补偿算法分析研究
2022-07-23内蒙古工业大学信息工程学院乌仁格日乐
内蒙古工业大学信息工程学院 乌仁格日乐
微小型无人机(Micro Unmanned Aerial Vehicle,MUAV)具备了小巧轻便、机动性强、研制与使用成本低等优点。随着中国逐步放开对低空领域的飞行监管,其在航空、电力巡线、灾害救助和公安等领域,正获得日益深入地运用。
在MUAV中,通过航姿测量参考系统(Attitude Heading Reference System,AHRS)获得机身的飞行姿态信息。AHRS是MUAV飞行系统的主要部分。由采用了MEMS系统(Micro Electro Mechanica Systems,微机电系统)的惯性传感器作为AHRS的组成部分之一,可以适应MUAV在尺寸、重量上的特点。
由于国际上对于MEMS传感器相关产品与技术的封锁,高精度的MEMS传感器不容易获得而且价格也较高,所以,对降低MEMS惯性传感器测量误差的途径、方法和技术进行研究,以实现采用低成本MEMS传感器组合构成MUAV的AHRS,具有重要的研究意义。
1 惯性测量单元MPU6050
3轴陀螺仪、3轴加速度计、数字温度传感器和数字运动处理器DMP是MPU6050的特点。如果使用多组件完成,需要考虑陀螺仪和加速度计轴间差,而且占用的空间也会增大,MPU6050包装大小仅为4h4h0.9mm,满足MUAV对尺寸的要求。另外MPU6050含6轴或9轴融合演算技术,能够分析复杂的数据,减轻分析运算给操作系统带来的负担。MPU6050的封装引脚和敏感坐标轴见图1。
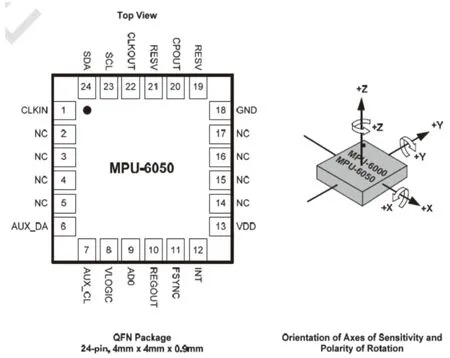
图1 MPU-6050封装与引脚示意图(左)和敏感坐标轴示意图(右)
2 随机误差研究
MEMS惯性器件的设计原理、加工工艺和装配技术不完善是其误差的主要原因。和AHRS的精度有关联的诸多原因中,随机误差是其中之一,因此需要对MEMS的随机误差进行补偿。
近年来MEMS传感器技术的不断发展和应用范围不断扩大,其随机误差补偿算法的代表性方法主要有以下几种:
Allan方差与小波变化相结合。第一步,获得陀螺仪及加速度计的随机误差的主要部分,这里通过利用Allan方差获得。第二步,通过小波变换分析信号,实现将有色噪声和白噪声相互分开。最终得出,分离MEMS随机误差可以通过小波变换完成,另外效果的好坏与小波变化尺度及选择的阈值密不可分,具体关系需要进一步分析。
功率谱密度分析法与Allan方差分析法及卡尔曼滤波相结合。第一步,通过功率谱密度分析法和Allan方差分析法建立对应数学模型并统一模型。第二步,通过卡尔曼滤波分析,获得增强的卡尔曼滤波。从对MEMS-INS/GPS姿态实验结果看出,改进后的方法起到了改善惯性系统精度的效果。
动态Allan方差法。采用动态Allan方差法研究MEMS陀螺仪的实测值,从结果看出,通过此方法可得到随机误差的主要来源,并且可以描述信号噪声与时间的变化关系。在随机误差的研究中,动态Allan方差法比传统Allan方差效果更好。
对MEMS陀螺仪随机误差的系数进行动态提取。由于传统Allan方差最小二乘拟合存在着缺点,它只能获得近似的均值,而动态提取使其改善。另外动态提取可得到随着时间的推移过程中随机误差系数的变化情况,可以方便研究是什么原因使MEMS陀螺仪性能发生改变。但是因为采用矩形窗函数,使噪声的分析频段受到限制。窗函数的类型与频段的关系需要更深入的研究。
采用时间序列法和经典卡尔曼滤波结合分析。针对MEMS陀螺仪:首先对其随机误差研究,使用时间序列法。然后,构建AR模型,并且构建随机误差的系统方程。最后,进行补偿,这里是通过经典卡尔曼滤波。分析后发现信号的方差得到了明显改善,滤波效果较好。
利用小波分析去除高频噪声,并论证明了一阶高斯-马尔可夫模型和Allan方差以及AR模型中,AR模型优于其余两种模型,并在把AR模型运用于GPS辅助MEMS实验平台进行实际飞行测试,其实验数据与参考平台Piccolo II autopilot system对比,结果表明AR模型是一种有效的随机误差补偿方法。
采用增强型粒子滤波(MPF)分别与AR模型和PCI(并行级联识别)结合,MPF-AR和MPF-PCI性能相当,但MPF-AR模型相对简单,时间效率高。
综上所述,对于MEMS器件的随机误差消除主要有AR模型、Allan方差、一阶马尔科夫、并行级联识别和小波分析等,然后结合Kalman滤波、扩展Kalman滤波和粒子滤波等。
3 基于MPU6050随机误差的补偿算法
3.1 建模方法
建立的随机误差模型精度直接决定MEMS传感器误差补偿的精度,研究随机误差时,可以通过Allan方差法、神经网络法建模,亦可以通过小波分析法、时间序列法、高斯一阶马尔科夫过程法等建模,这些都是常用的方法。
在基于MPU6050的MUAV的AHRS设计中,神经网络法和小波分析法的建模方式并不适合,因为其模型阶数较高,算法复杂。而其他三种方法在导航领域应用较多。对Allan方差法、高斯一阶马尔科夫过程法以及基于时间序列的自回归AR模型进行实验对比表明,AR模型法优于高斯一阶马尔科夫过程法和Allan方差法。
因此,对于MPU6050的随机误差建模采用AR模型法。对其中的建模系数的确定方法有三种,即Yule-Walker(YW),Covariance(COV),和Burg,采用Covariance(COV),和Burg方法,因为二者对于不同的测试数据集确定的系数具有高度一致性,相同条件下Yule-Walker(YW)确定的系数波动性较大。
3.2 离散Kalman滤波原理
在基于MPU6050的随机误差补偿中使用离散Kalman滤波器。Kalman滤波是一种高效的自回归滤波器。而离散型Kalman滤波采用实时递推算法。
结论:对于MEMS传感器随机误差,本文列举了常用的几种补偿算法,总结了各自的特点和应用情况。根据MUAV的特点,分析适合于基于MPU6050的补偿算法。首先使用AR模型法构建模型,而后使用离散Kalman滤波算法对其进行补偿。
