智能电力线路巡检机器人的设计与实施
2022-07-22钱丹杨周卫华帅学超
钱丹杨 周卫华 帅学超
智能电力线路巡检机器人的设计与实施
钱丹杨1周卫华1帅学超2
(1. 台州职业技术学院,浙江台州 318000;2. 杭州电子科技大学,杭州 310018)
本文提出一种智能电力线路巡检机器人的设计与实施方案。首先,分析线路巡检机器人的功能需求,采用轻量化设计思路,提出线路巡检机器人的结构设计方案,使其具有自主行走、越障、爬坡等功能;其次,设计基于机器人操作系统(ROS)的电气控制平台,实时获取三维激光点云、定位定姿系统(POS)数据、正射数字影像等;然后,融合三维激光、位姿、视觉等数据,设计数据融合方法;最后,对制作的实验样机进行性能测试,结果表明相关参数能够满足工程应用研究的要求。
巡检机器人;越障;故障识别;数据融合
0 引言
输电线路的巡检工作关乎整个电力系统的运行效率[1],随着新一代信息技术的发展,应用物联网、人工智能、高端制造等技术,在输变电设备运维领域开展智能作业可以有效提升劳动生产率,降低人员劳动强度[2]。
输电线路具有跨度大、中间障碍物多等特点[3],国内外的科研工作者做了大量研究,设计了很多电力线路巡检机器人,并进行了试验。文献[4]研制的巡检机器人应用于220kV单相线路巡检,具有越障、图像识别、自主行走、远程通信、自主上下塔杆等功能,制作的样机运行效果良好,对后续的研究具有很高的参考价值。文献[5]针对500kV线路设计可自主行走的巡检机器人,具有跨越障碍物的功能,机械部分包含红外相机和机器视觉检测的安装装置,通过采集图像数据检测输电线路、绝缘子、抗震锤及其他输电设备的损坏情况,地面基站通过远程通信控制巡检机器人。文献[6]创新性地设计出具有除冰、在线充电等功能的巡检机器人,同时,融合了多种传感器对输电线路、绝缘子、线路接头、杆塔等进行检测,可实时进行除冰工作,具有很高的参考意义。文献[7]根据现场工作条件,提出巡检机器人应该具有自主行走、电池电量监控、越障等功能,结合实际工况设计的巡检机器人能同时满足输电线路异物检查、线路断股等缺陷检测要求。
由上述研究可知,巡检机器人的关键技术点包括以下几个方面:①具有越障爬坡功能、轻量化的巡检机器人机构本体设计;②采用合适的传感器,能快速检测到故障点的检测方式及控制算法;③环境信息量大,需要融合各个传感器的数据并进行分析判断。
本文提出的电力线路巡检机器人采用轻量化设计方案,具有自主越障功能,并通过多传感器集成标定与多通道融合技术,为电力线路巡检提供丰富的状态数据,进而为电力大数据提供数据支撑。
1 巡检机器人机械结构设计
智能电力线路巡检机器人整体结构如图1所示,主要包括爬塔机构、行走机构及任务吊舱三个模块。行走机构及任务吊舱组成机器人结构本体,爬塔机构与机器人本体是可分离的。爬塔机构采用仿生式蠕动爬行方式,可跨越电塔横梁,可将巡检机器人本体从地面送到电塔上部顺利实现挂载。爬塔机构如图2所示。

图1 巡检机器人整体结构

图2 爬塔机构
任务吊舱内部主要用于固定电气控制部件,包括三维机载激光雷达miniVUX—1UAV、树莓派控制板、数码相机、电机驱动器、锂电池、导航单元、电源转换模块、定位天线等,如图3所示。激光雷达的下端安装面固定在定制的光滑安装板上,机械开口,保证三维激光雷达的探头裸露在外部,可以检测到外部信息,通过合理布局,惯性导航单元与数码相机的安装面也固定在安装板上。为了减少通信干扰,定位天线通过额外加工的支杆固定在方形外壳的上表面,电源开关、网络接口、接插件等分布在后端盖的内表面及线槽周边。
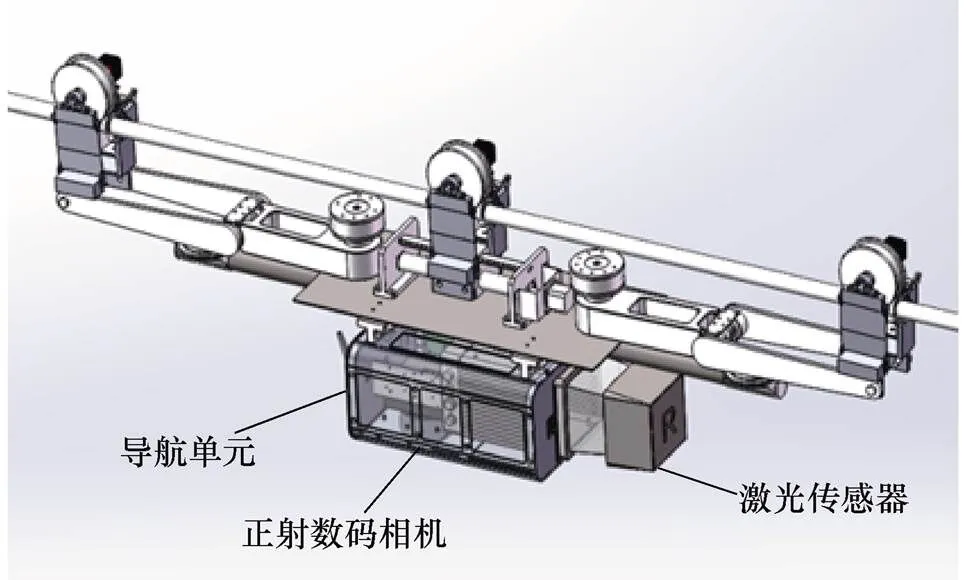
图3 电气部件安装示意图
以架空电力线路巡检机器人为主打产品的公司主要有广东科凯达和国电南瑞公司。目前,两公司的架空线路巡检机器人在行走机构方面主要采用两臂式机构,越障性能有限,且没有配备相应的上下塔机构,机器人还需要采用人工吊装的方式进行挂载,机器人过于笨重,质量达到50kg,对线路磨损较大。本文设计的巡检机器人,相较于上述两公司产品,具有自主上下塔功能,真正实现了自主巡检,机器人总体质量可控制在30kg以内,大大减少了行走轮对电线的磨损。
2 基于机器人操作系统的控制系统
基于机器人操作系统(robot operating system, ROS)软件平台的移动机器人控制系统,连接电机驱动、电源管理部分,融合视觉、雷达等传感器,构建软件框架,具有可操作性强、代码灵活、数据传输效率高等优点[8-9]。任务系统根据控制站上传的任务文件或实时指令执行三维激光点云、定位定姿系统(position orientation system, POS)数据记录、正射数字影像等数据获取与同步采集,电气控制框图如图4所示。
地面站可以分析巡检日志,对巡检的结果进行回放,方便及时总结。地面站支持软件模拟巡检,以最小的代价,达到最佳的学习效果。任务系统根据控制站上传的任务文件或实时指令执行三维激光点云、POS数据记录、正射数字影像等数据获取与同步采集。任务完成后地面站可通过有线或无线方式快速下载巡检数据,包括原始点云数据、POS航迹数据、可见光照片、曝光同步数据及巡检任务执行日志文件等。
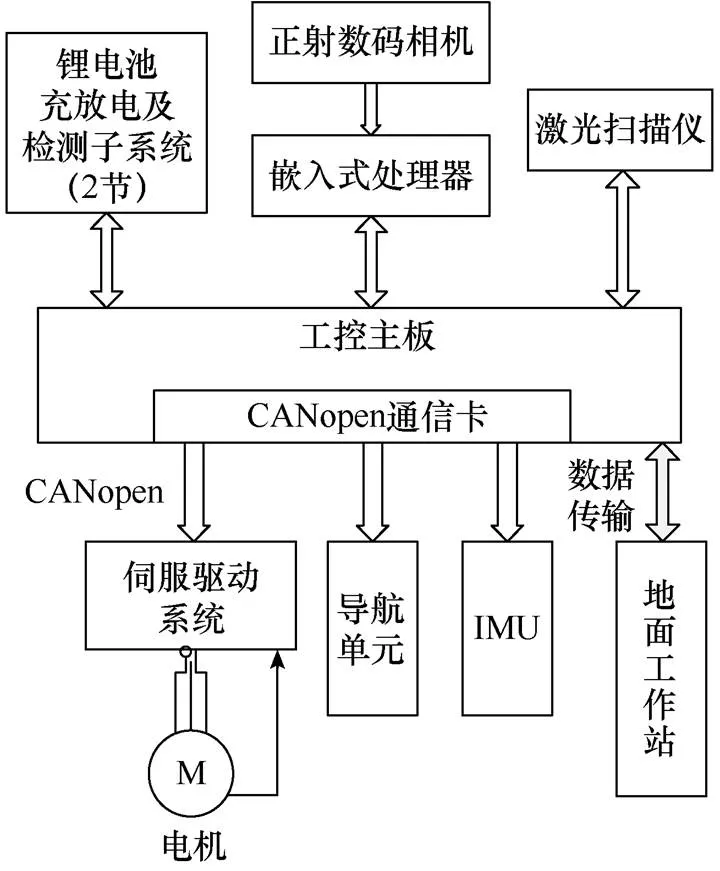
图4 电气控制框图
3 数据采集与融合
数据采集由传感器集成部件完成,主要包括激光雷达、POS及正射数码相机等部分,主要执行三维激光点云、位姿数据、正射数字影像等数据同步获取。
三维激光雷达选用美国Riegl公司提供的三维机载激光雷达miniVUX—1UAV,具有小型化、精度高、质量轻等优点,适合移动机器人、无人机等搭载。激光雷达通过多回波检测、数字化回波信号、在线波形处理等技术,生成电力线路设备的高精度三维点云数据,通过内部控制器的自动分类和滤波,快速生成高程模型和数字表面模型,支撑后续的交叉跨越障碍物检测、电力线路走廊三维可视化、电力线弧垂信息提取等研究[10]。
定位定姿系统作为激光扫描空间位置姿态元素测量的基准,对三维激光点云坐标的计算起着非常重要的作用,其测量误差直接影响电力线路及相关设备点云数据的精度[11]。本文综合考虑精度、体积、质量、成本等因素,采用全球导航卫星系统(global navigation satellite system, GNSS)+惯性导航系统(inertial navigation system, INS)的组合导航系统,将具有高精度定位功能的GNSS接收机与稳定的惯性测量单元(inertial measurement units, IMUs)进行组合,可实时提供可靠、高精度的位置、速度、姿态等信息。在短期时间内,即使导航卫星信号受遮挡或因故障不可用时,组合导航系统仍可提供连续可靠的导航数据[12]。组合导航精度见表1。
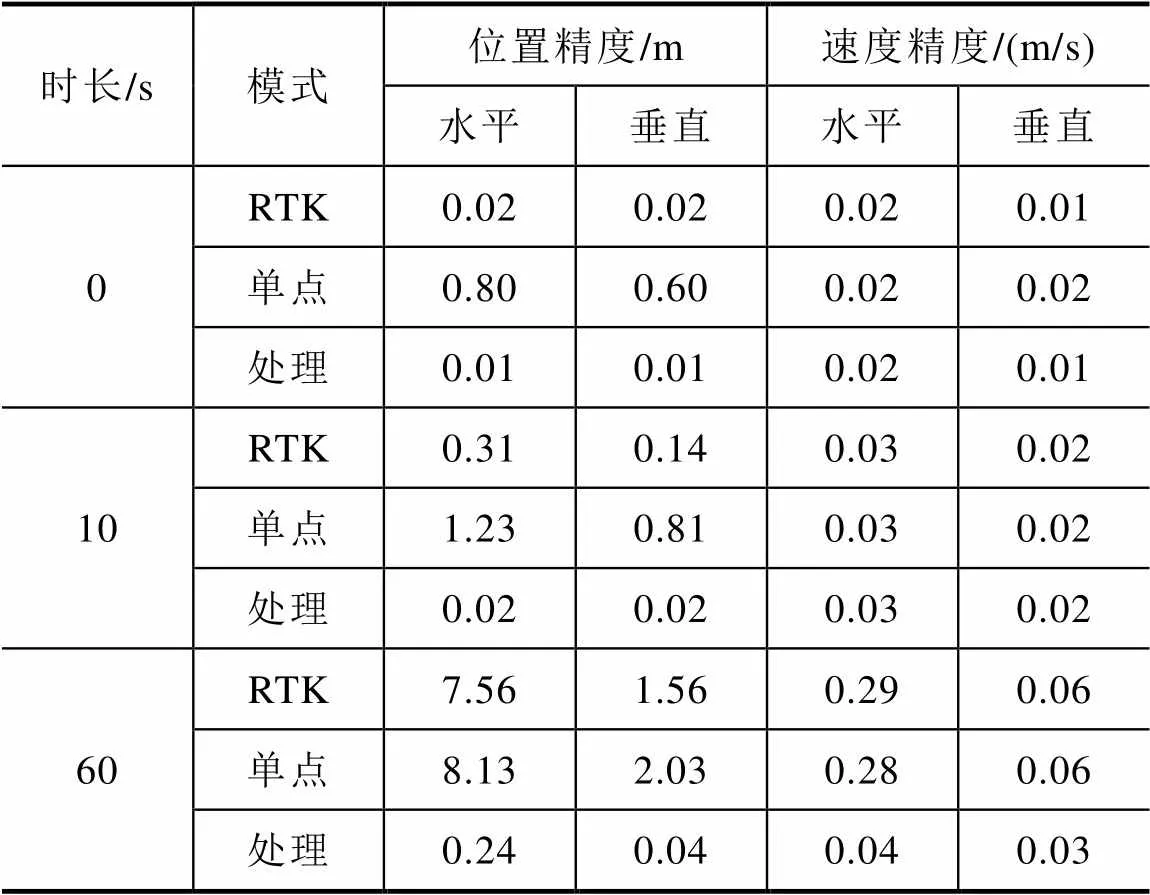
表1 组合导航精度
正射数码相机主要实现正射影像采集,为辅助点进行电力线故障信息提取和定位提供高分辨率的基础影像资料。
系统数据处理过程如图5所示,三维激光雷达的点云数据、数码相机的数字影像数据、定位模块的位姿数据实时同步采集,保存到树莓派控制器中,通过无线通信的方式将数据传输到地面的计算平台,实现多种传感器数据的融合计算处理,并实时构建传输线路电气设备的三维模型。在三维模型的基础上,根据电力线、走廊地物、电塔及其他设备的特点,分析提取故障点的特征,并建立故障模型数据库,为进一步的电力线路数据分析及深化应用奠定基础。后续,根据处理后的数据库数据,可实现电力线路及相关设备的可视化及危险点、故障点等检测。
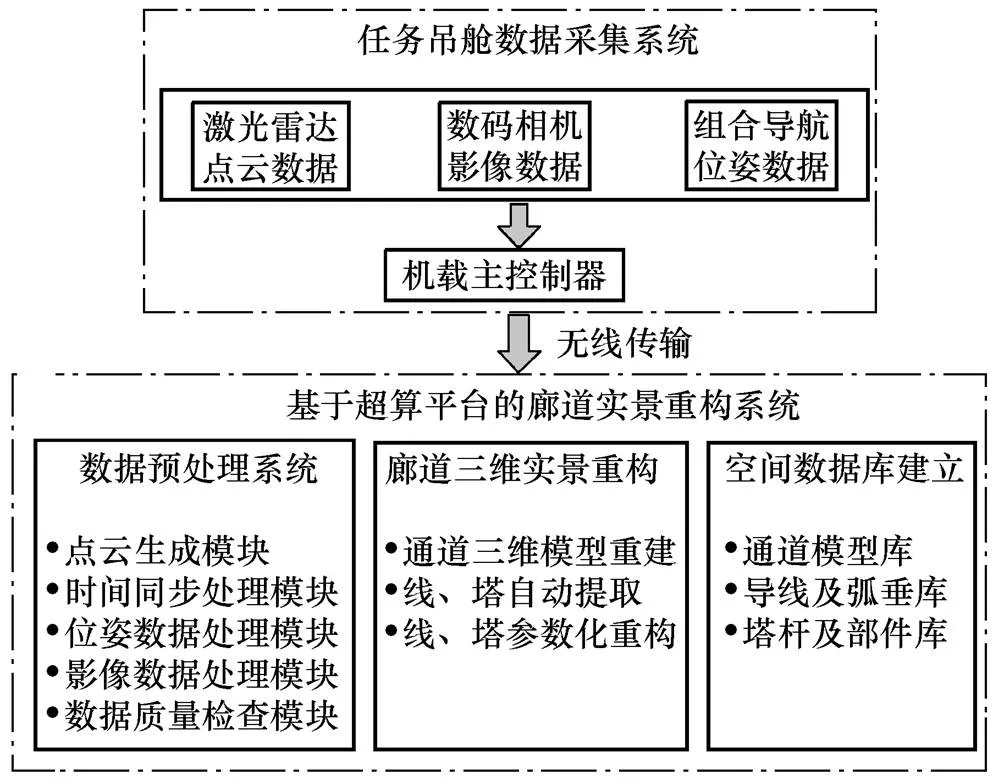
图5 数据处理过程
4 样机与测试
本项目设计制作的巡检机器人尺寸为1 923mm× 720mm×968mm,总质量≤30kg;定位精度:平面及高程<10cm;运动速度精度:0.04m/s;扫描视场角为330°;遥控距离≥350m;相机像素:全画幅5 060万。目前,已制作出实验样机,如图6所示。传感器与控制系统的精度满足测试的需求。后续,将与当地的电科院联合测试巡检机器人,并在实际测试的基础上,进一步完善巡检机器人的机构设计、控制算法等。

图6 实验样机
5 结论
本文分析了电力线路巡检机器人的功能需求,设计并制作了实验样机,具有如下优势:
1)采用轻量化的巡检机器人设计方案,具有自主爬塔功能,替代了现存的人工吊装上下塔的方式,真正实现机器人自动巡检功能。
2)基于ROS的电气控制系统,开放性好,功能扩展方便。
3)引入多源数据的自动自标定融合,极大地简化了后续数据处理流程,为电力线路准实时全景重构和动态数据管理提供技术支撑。
[1] 张沛, 田佳鑫, 谢桦. 计及多个风场预测误差的电力系统风险快速计算方法[J]. 电工技术学报, 2021, 36(9): 1876-1887.
[2] 王怡爽, 苑朝, 翟永杰. 一种新型架空输电线路巡检机器人的机构设计[J]. 西北工业大学学报, 2020, 38(5): 1105-1111.
[3] 沈周丽, 李锐华, 胡波. 基于负序电压前馈的改进型柔性直流输电系统有功功率控制策略[J]. 电气技术, 2021, 22(11): 1-6.
[4] 朱兴龙, 王洪光, 房立金, 等. 输电线路巡检机器人行走动力特性与位姿分析[J]. 机械工程学报, 2006, 42(12): 143-149.
[5] 魏永乐, 房立金. 双臂巡检机器人沿输电线路行走特性研究[J]. 北京理工大学学报, 2019, 39(8): 813- 818.
[6] 薛栋良. 高压线路抱臂式巡检机器人越塔规划及辅助金具设计[J]. 电气工程学报, 2019, 14(4): 106-112.
[7] 王吉岱, 徐希清. 巡检机器人传感器容错控制技术的研究[J]. 现代制造技术与装备, 2016(8): 134-137.
[8] 袁丹鹤, 杜玉晓, 江鑫, 等. 基于ROS的人形机器人建模与仿真[J]. 自动化与信息工程, 2020, 41(6): 6-12.
[9] 朱建军, 张博文, 王明园. 基于ROS的机械臂建模与路径规划仿真[J]. 科学技术创新, 2021(19): 180- 181.
[10] 王添乐, 李永光, 南东亮, 等. 基于智能变电站远动通信的自动对点调试系统[J]. 电气技术, 2021, 22(9): 41-45.
[11] 雷怡琴, 孙兆龙, 叶志浩, 等. 电力系统负荷非侵入式监测方法研究[J]. 电工技术学报, 2021, 36(11): 2288-2297.
[12] 易琳, 王柯, 钱金菊. 搭载于无人机的电力廊道数据采集系统设计[J]. 广东电力, 2020, 33(4): 120-125.
Design and implementation of intelligent power line inspection robot
QIAN Danyang1ZHOU Weihua1SHUAI Xuechao2
(1. Taizhou Vocational & Technical College, Taizhou, Zhejiang 318000;2. Hangzhou Dianzi University, Hangzhou 310018)
A design and implementation scheme of intelligent power line patrol robot is proposed. Firstly, the functional requirements of the line patrol robot are analyzed. Using the lightweight design idea, the structural design scheme of the line patrol robot is proposed, which has the functions of autonomous walking, obstacle climbing, slope climbing and so on. Secondly, an electrical control platform based on robot operating system (ROS) is designed to obtain 3D laser point cloud, position and orientation system (POS) data, digital image and other data in real time. Thirdly, the data fusion method is designed by fusing 3D laser, pose, vision and other data. Finally, after testing, the performance parameters of the experimental prototype can meet the requirements of engineering application research.
inspection robot; obstacle crossing; fault identification; data fusion
2022-02-10
2022-03-16
钱丹杨(2001—),浙江杭州人,主要从事电气控制方面的研究工作。
2021年浙江省大学生科技创新活动计划暨新苗人才计划(2021R481001)
台州市科技计划项目(21gya34)
