全地形智能仓储物品归整机器人的设计*
2022-07-22尹翔飞杨立龙郑飞杰
尹翔飞 杨立龙 郑飞杰
三明学院机电工程学院 三明 365004
0 引言
近年来,人工成本不断上涨,各个领域都出现“机器换人”的现象,工业领域尤为普遍,工业机器人转型智能制造发展态势强劲,前景广阔[1,2]。工业机器人助推制造业的生产力大幅度提升,商品的存量越来越庞大,而快速、有序、准确地储存归整问题的解决也更加紧迫,智能化的仓储物品归整机器人成为关注热点。另外,由于新冠肺炎疫情发展过程中,有发现在冷链食品外包装分离出新冠活病毒的情况[3],出于对工作人员的生命健康安全的考虑,物流接收、分拣、归整等过程的工作,需要完全由机器人代替人工来完成,直至所有物品经过全面消毒之后,保证安全的情况下再进行人工介入,故仓储物品分拣归整类的机器人更是一度成为焦点。
目前,仓储物品归整机器人主要分为2种:一种是拥有灵活的机械臂但位置固定不能移动且无法智能控制和无视觉识别功能的纯机械化的操作;另一种是智能化可自由移动搬运物品的机器人,但它无法在复杂地形中正常工作,无抓取功能,只能依靠其他辅助设备完成仓储规整。
在许多行业中,尤其是物流行业,对货物的搬运、归整基本仍为人工完成,无法满足快速发展的市场需求,搬运效率低且成本高。另外,无法满足疫情防控的要求,对工作人员的生命健康安全无法做到完全可控。由市场验证可知,以机器人替代人工,既能满足疫情防控要求,又可提高生产效率,从长远来看可降低成本[4,5]。因为物流货物搬运的场所较复杂,而当下搬运归整机器人一般是在环境良好的场所使用,无法满足崛起的物流行业的搬运归整环境。所以,为了解决搬运机器人无法适应崎岖地形、造价高、操作困难等问题,本文设计了一款造价低、操作简单、能对货物进行搬运且适应各种地形的全地形智能仓储物品归整机器人,提高物流等搬运归整量大的行业的生产效率和经济效益。
1 结构系统设计
1.1 运行系统的结构设计
随着运行工作环境复杂程度的增加,对全地形智能仓储物品归整机器人的性能要求也随之提升,但仍存在转向过程中车身不稳的问题[6]。对此,出现了一些改善机器人运行震动问题的方法,如通过预先编制智能算法来控制车身运动姿态,从而改善车身震动程度[7]。通过设计出不同类型的行走部件,改善行走部件与地面的贴合度,进而改善车身震动状态[8]。然而,对于较复杂的搬运归整场所,这些方法都不能完全解决震动影响机器人运行稳定性。为了实现在各种地形条件下的搬运及其他功能,全地形智能仓储物品归整机器人的可靠运行是保障以上工作能顺利完成的必要条件,而运行系统的车身运动稳定性是其可靠运行的重要前提[9,10],故对改善车身运动稳定性的研究具有重要意义。
车身运动稳定性是指机器人在复杂的地形上运行时车身震动小,物品偏移度小,保障物品完好运送到指定位置,震动小主要靠运行系统中的减震器来实现,本文针对需求进行全新设计。如图1所示,运行系统由运行车身、减震器、履带、驱动轮、承重轮、诱导轮等组成。运行车身作为框架,连接固定住除履带的其他部件,履带包络住除车身的其他部件。

图1 运行系统的结构示图
如图2所示,减震器由弹簧、连接轴、液压柱、连接器、承重轮等组成,其中液压柱是减震的最主要缓冲元件。当履带受力时,由承重轮传递给弹簧和液压柱,弹簧受力开始被挤压,随后产生同等的力反向施力。当弹簧受力达到一定程度时,力就会传递给液压柱,液压柱受力后开始缓冲。当压力全部被缓冲掉后,弹簧和液压柱开始恢复原样,实现减震作用,达到稳定机器人的目的。连接轴使减震器连接固定在运行车身上,连接器连接承重轮和连接轴。承重轮既能起到承载机器人整体质量,也是减震器的从动轮,具有很强的稳定性。诱导轮也是从动轮,用来诱导和支撑履带,与履带调整器一起调整履带的松紧程度,同时能固定上端履带,以防上方履带塌陷而影响使用。驱动轮靠高速电动机来转动,强劲的效率能够保证机器人的正常运行,且工作可靠,后期维护保养成本低。

图2 减震器结构示意图
1.2 六自由度机械臂的设计
机械臂是搬运机器人实现搬运归整目的最重要的工具,是保证被搬运物件完整和其放置位置精确度的主要机构。因此,要求机械臂具有适当的自由度,且要保证其具有足够的刚度和强度,机器臂的伸缩和旋转要准确和高效[11]。机械臂的稳定性、灵活性、安全性是决定一个机器人是否能高效稳定完成工作的重要保障。
如图3所示,机械臂结构由42BYG34-401A步进电动机、传动板块、旋转底盘等组成。42BYG34-401A步进电动机是整个机械臂的动力来源,传动板块附着在42BYG34-401A步进电动机旁边,随电动机的运作带动传动板块,板块角度可达到27°~136°,能使整个机械臂完成前进和后退、绕X轴和Z轴旋转、沿X轴与Y轴移动,能够精确、高效率地完成指令。旋转底盘下装有恒速电动机,能够实现绕Z轴旋转。

图3 机械臂结构
如图4所示,机械臂驱动单元是机械臂运动板块的主要部分,整个机械臂都靠这种结构来完成运动。其中连接板块与步进电动机固定连接,便于驱动结构的连接且可保证安全稳定。步进电动机是驱动结构的动力来源,保证整个机械臂的正常运行工作。步进电动机靠脉冲信号控制驱动,其转子随脉冲信号的变化进行一定角度的转动,从而精确地调整整个驱动结构的运动。从动板一侧通过联轴器与步进电动机连接,另一侧与下一个驱动结构的连接,随步进电动机转动角度的改变而改变,选用的42BYG34-401A步进电动机的步距角为3°~5°。刚性联轴器的作用是与步进电动机的转子相连接来带动从动板,其结构简单,成本较低,工作可靠,且可传递较大转矩,能保证2轴间较高的对中精度,常用于载荷平稳、高速或传动精度要求较高的轴系传动。

图4 驱动单元示意图
1.3 机械抓手的设计
如图5所示,机械臂手部的动力源是靠步进电动机带动主动齿轮,主动齿轮带动2个从动齿轮。2个从动齿又连接抓手的2个杆,杆带动抓手其他部分。当驱动主动齿轮顺时针运转时,抓手收缩抓取物体;当主动驱动齿轮逆时针运转时,抓手松弛可放开物体。根据物品的大小,通过脉冲信号发送指令来控制抓手的收缩量和松弛量。
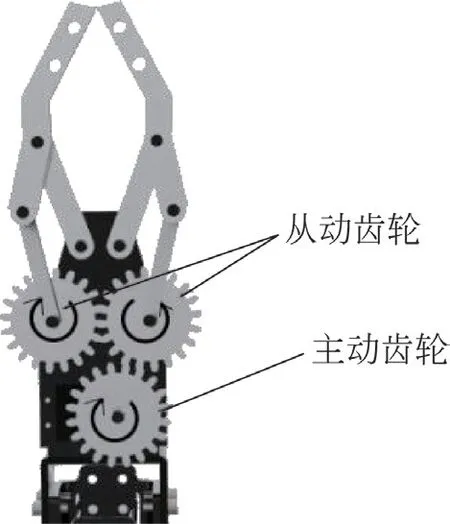
图5 机械抓手结构示意图
1.4 整体结构系统
如图6所示,以全地形智能仓储物品归整机器人主要由多自由度灵活机械手、二维码颜色识别摄像头模块(1 080 p)、自主设计创新型履带式减震底盘等部分组成。在实际工作中,机器人会根据具体任务要求,通过控制中心进行接收和发送信息、指令来控制机器人本体,实现具体工作流程。

图6 整体结构示意图
首先,控制程序准备就绪,无接触启动机器人,机械手顶部的摄像头启动捕捉信息,将信息反馈给控制中心,控制中心发出指令,驱动机械手上4个步进电动机,实现机械抓手的方向和角度的调整,而机械手传动板块内的电动机带动齿轮转动,实现机械抓手的抓取动作。在抓取过程中,顶部的摄像头会识别机械抓手的抓取状态,抓取任务完成后反馈给树莓派控制板块。控制中心发送指令到底盘上的步进电动机,带动履带主动轮实现运动或停止,主动轮在运动过程中,根据指令进行速度调节,从而达到底盘的直线运动或转向,进而实现对物体的搬运。在运送过程中,红外测距仪在检测到障碍后反馈给控制中心,控制中心发送指令到底盘上的步进电动机,获得合理的转向角度以达到规避的目的。到达指定地点后,顶部摄像头识别指定区域,将信息反馈给树莓派控制板块,控制中心将指令发送给机械手上的步进电动机,调整机械手的方向和角度,机械手传动板块内的电动机带动齿轮转动,实现机械抓手对物品的放置。任务完成后,机器人各部分根据程序指令自动回到初始位置或指定位置。
2 控制系统设计
全地形智能仓储物品归整机器人的控制系统由二维码、树莓派、Arduino、循迹模块、舵机控制模块、电动机驱动模块、超声波模块、舵机、减速电动机等组成。如图7所示,摄像头是通过树莓派串口通信Arduino来实现摄像头的物料颜色识别和二维码识别,循迹模块与超声波模块将信号传给Arduino,控制中心进行判断后控制电动机的正转反转及停止来控制物料分拣机器人的转弯、后退、前进及停止,控制舵机的正传或反转来控制机械臂抓手的开合。

图7 控制流程图
1)二维码识别 二维码识别是通过设备将二维码的图形转换为可用信息。如果根据条形码编程的原理来识别的话,工作太繁琐,每一个编程人员都必须知道每种条形码的原理,而且不方便实用。本设计采用的是条形码识别工具包,结合树莓派Linux平台来实现二维码的识别,这种工具包的优点是不需要掌握各种条形码的编码规则简化了编程,且识别率高。
2)颜色识别 数字图片一般采用RGB模式、CMYK模式和HSV模式。RGB颜色模式和CMYK颜色模式广泛应用于视频摄像头、数字图片和数字视频等,但HSV模型才更加符合人对颜色的描述和解释(H为色调,S为饱和度,V为亮度 )。所以,选择通过识别物料RGB的数值来转换为HSV模式来实现物料颜色的识别。
3 实验分析
根据设计方案进行样机制作,并进行相关测试实验,通过样机实行二维码识别功能、摄像头颜色识别功能、复杂地形运行、物品搬运与归整等实验,验证设计方案的可行性。
1)二维码识别功能 运行稳定,识别率百分百;
2)摄像头颜色识别功能 运行稳定,正确率达到预期要求,其中错误部分经分析不是硬件问题,而是识别算法精度有待于提高;
3)复杂地形运行 运行良好,对各种地形也有不错的适应能力,稳定性达到基本要求,有提高空间;
4)物品搬运与归整 运行良好,基本完成任务要求,但效率偏低。
4 总结
全地形智能仓储物品归整机器人结构主要由全地形减震系统、机械臂、机械抓手等组成,实现了在各种地形上能够正常的进行搬运工作。经过制作样机测试,该机器人能够实现在各种地形的平稳运行工作,且具有稳定性好、操作简单、智能化程度高、造价低等优点。未来不论是在农业、采矿业、物流业等行业都能有很好的应用前景。
