2D-CFAR检测的性能分析与实现
2022-07-22左林虎刘国浩
左林虎 王 谦 刘国浩
(1.西安电子工程研究所 西安 710100;2.陆军装备部驻西安地区军事代表局 西安 710000)
0 引言
恒虚警(Constant false alarm rate, CFAR)检测是雷达信号处理中的关键技术之一,即通过估计背景噪声功率自动形成检测阀值,从而保持恒定的虚警率。常见的CFAR技术有单元平均恒虚警(CA-CFAR)、单元平均取小恒虚警(SO-CFAR)、单元平均取大恒虚警(GO-CFAR)、有序排序恒虚警(OS-CFAR)以及剔除平均恒虚警(TM-CFAR)等。其中,在均匀杂波背景下,CA-CFAR获得接近最优的检测性能,但在杂波边缘场景会有虚警或者漏警,在多目标场景会出现目标遮蔽现象;SO-CFAR、OS-CFAR以及TM-CFAR改善多目标场景下的目标遮蔽现象,相应地在杂波边缘场景和均匀场景下检测性能下降;GO-CFAR能有效地避免杂波边缘的虚警,但在多目标场景下更容易出现目标遮蔽现象。以上CFAR检测器均是在距离维对目标进行检测,没有考虑多普勒维度信息,二维恒虚警检测(2D-CFAR)则是同时在距离维和多普勒维度选取参考单元对背景噪声功率进行估计。
CFAR的检测性能与参考单元个数相关,在相同的虚警率下,当参考单元个数增加时,CFAR损失下降。对于一维CFAR而言,距离维上参考窗长增加的同时也意味着待检单元附近的干扰更易进入参考窗内,同样也不利于准确估计背景噪声功率。与一维CFAR相比,在相同的参考单元个数下,二维CFAR的参考窗在距离维的长度可以更小,意味着待检单元附近的干扰对目标检测影响更小。与一维TM-CFAR类似,也可以在二维CFAR中加上剔除,进一步提升二维CFAR检测在多目标场景下的检测性能。
本文利用雷达模拟器产生地杂波边缘场景、多目标干扰等非均匀杂波场景,通过Matlab仿真分析CA-CFAR、SO-CFAR、GO-CFAR、OS-CFAR、TM-CFAR、2D-CFAR算法以及二维TM-CFAR算法(TM2D-CFAR)的检测性能。在GPU中实现上述CFAR算法,在同等的输入条件下,统计各CFAR算法的运算时间。结合检测性能和运算效率综合分析相关CFAR检测器的性能。
1 二维CFAR算法模型及仿真结果
1.1 二维CFAR算法模型
二维参考窗同时在距离维和多普勒维选取参考单元对噪声背景进行估计。假设二维参考窗在距离维和多普勒维度的数目分别为和,保护窗在距离维和多普勒维度的数目分别为和,则二维参考窗其结构如图1所示。
由图1可知,二维CA-CFAR检测器的噪声估计值可以表示为式(1)。
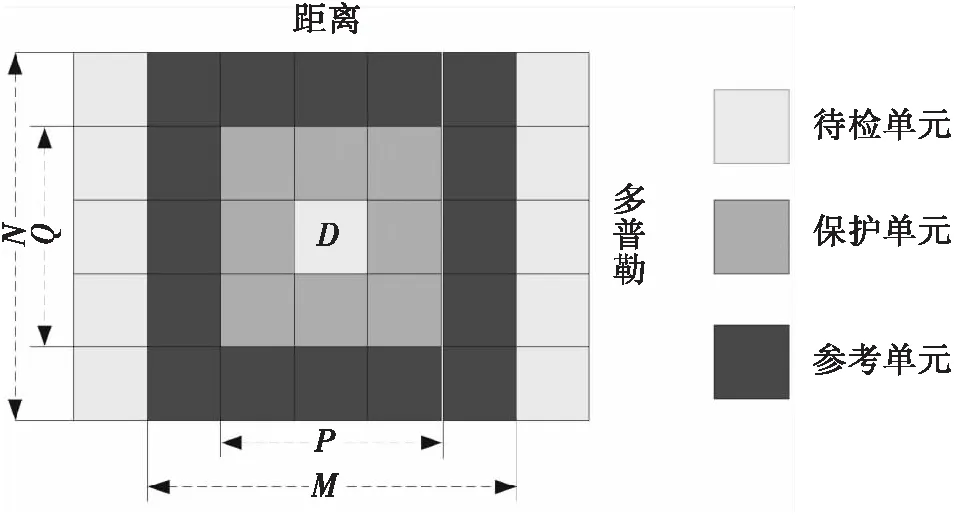
图1 CFAR处理参考窗
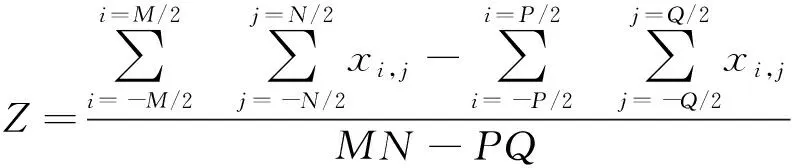
(1)
其中,表示二维参考窗内距离维上第个、多普勒维上第个参考单元的采样值。
对二维参考窗内的采样值进行排序,再剔除从最小采样值起的个较小参考单元个数,从最大采样值起的个较大参考单元个数。二维TM-CFAR检测器的噪声估计值可以表示为式(2)所示。
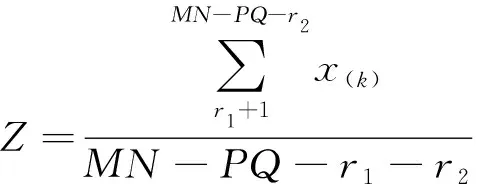
(2)
其中()表示二维参考窗内参考单元的采样值经排序后的第个采样值。
检测门限可表示如式(3)所示。
=×
(3)
其中,为门限因子。
通过待检单元的采样值与检测门限比较来判断目标是否存在,如式(4)所示。
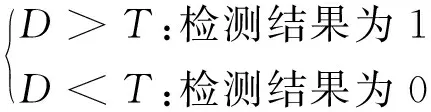
(4)
1.2 相关CFAR检测器仿真结果
1.2.1 杂波边缘场景
雷达模拟器在32.25km处设置静止目标,在28.25~31.75km范围内添加丘陵地貌的杂波。回波数据经脉压、MTD等处理后,距离-多普勒数据矩阵如图2(a)所示,多普勒通道1的距离维数据局部图如图2(b)所示。
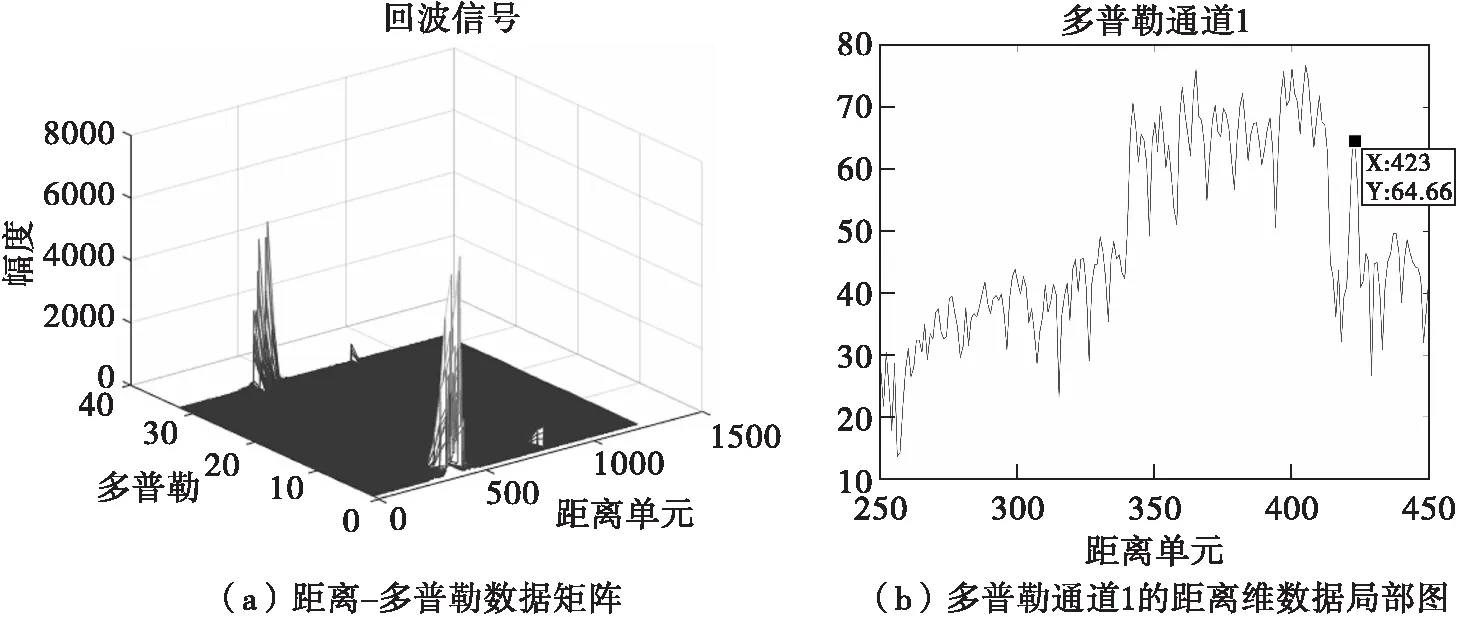
图2 杂波边缘场景下雷达回波数据
从图2中,可以看出来目标在多普勒1通道的距离单元423附近,杂波区域约在距离单元340到414之间。
CA-CFAR、GO-CFAR、SO-CFAR、OS-CFAR、TM-CFAR的保护单元个数均设置为3,参考单元个数设置为16,OS-CFAR排序后选择第13个参考单元,TM-CFAR剔除最大和最小的3个参考单元采样值。二维CFAR的保护圈数为1圈,参考圈数为2圈。调整各个CFAR的门限乘积因子,使得在均匀杂波背景下,它们的虚警率均为1×10。边缘场景下,相关CFAR检测器的多普勒通道1的检测结果如图3所示。

图3 杂波边缘场景下CFAR检测结果
图3(a)为CA-CFAR检测结果,可以看出杂波边缘目标被遮蔽;图3(b)为GO-CFAR检测结果,与图3(a)类似;图3(c)为SO-CFAR检测结果,杂波边缘目标可以检测到,同时杂波边缘有虚警点;图3(d)为OS-CFAR检测结果,与图3(c)类似;图3(e)为TMCA-CFAR检测结果,与图3(a)类似,杂波边缘目标被遮蔽;图3(f)为二维CFAR检测结果,杂波边缘目标可以检测到,同时杂波区域也有虚警;图3(g)为二维TM-CFAR检测结果,与检测结果图3(f)类似。
相关CFAR的所有多普勒通道上的检测结果统计如表1所示。
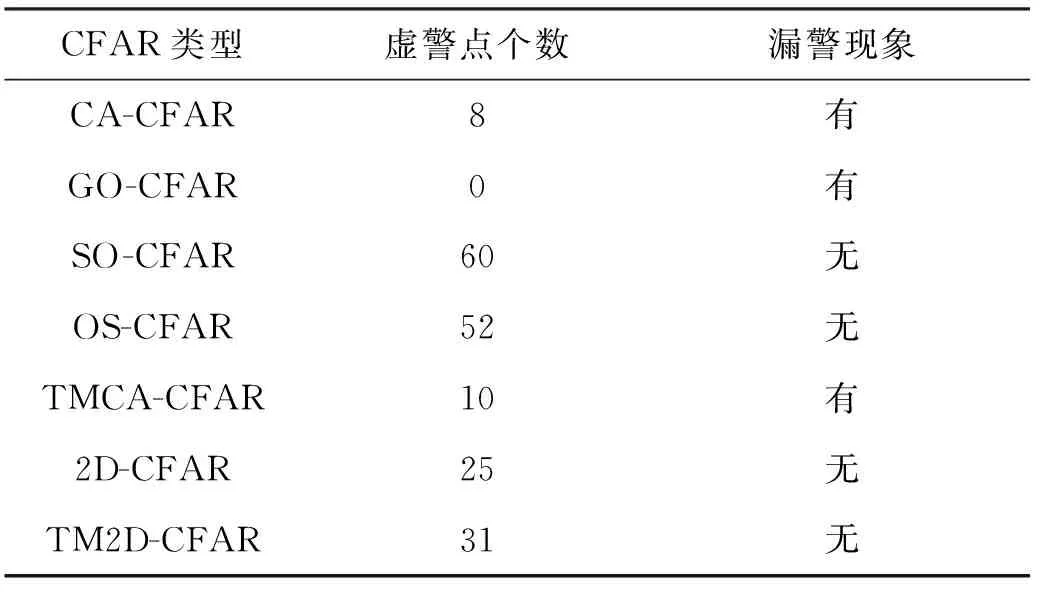
表1 杂波边缘场景下的相关CFAR检测结果对比
从表1中,可以看出CA-CFAR、GO-CFAR、TMCA-CFAR检测的虚警点较少,但是位于杂波边缘附近的目标没有被检测到,而SO-CFAR、OS-CFAR能够检测到杂波边缘附近的目标,但是同时有很多虚警点,相对而言,2D-CFAR和TM2D-CFAR的检测结果比较均衡,没有漏警,虚警较少,再对比2D-CFAR和TM2D-CFAR的检测结果,可见在杂波边缘场景应用剔除技术并没有收益。从整体结果看,在杂波边缘场景下,可见二维CFAR的检测效果好于一维CFAR的。
1.2.2 多目标场景
雷达模拟器在49.5km、50km、50.25km处设置静止目标,RCS依次为10m、1m、10m。回波数据经脉压、MTD等处理后,距离-多普勒数据如图4(a)所示,多普勒通道1的距离维数据局部图如图4(b)所示。
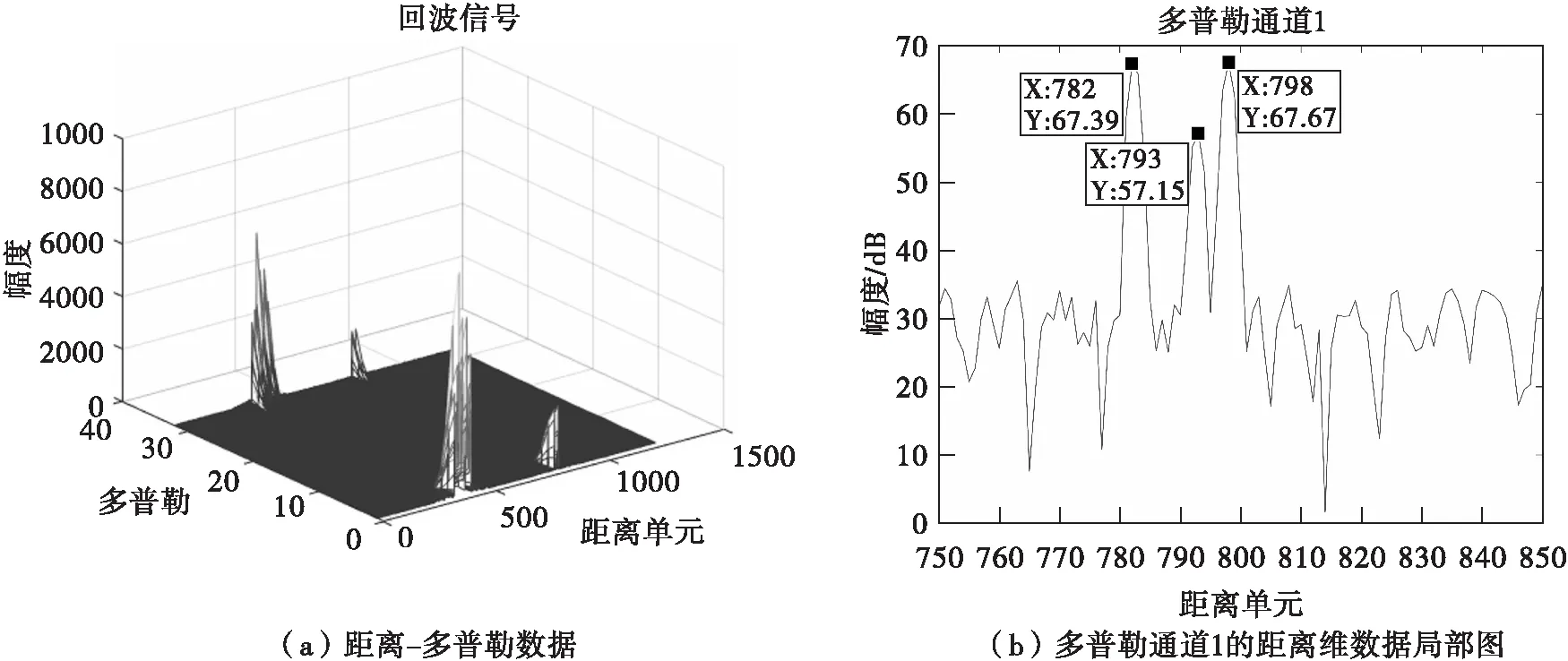
图4 多目标场景下雷达回波数据
相关CFAR的参数配置与上一致,相关CFAR检测器的多普勒通道1的检测结果如图5所示。
图5(a)为CA-CFAR检测结果,位于中间的小目标被遮蔽;图5(b)为GO-CFAR检测结果,与CA-CFAR类似;图5(c)为SO-CFAR检测结果,位于中间的小目标被遮蔽,这是由于目标的前后参考窗内都有干扰;图5(d)为OS-CFAR检测结果,三个目标均能被检测,OS-CFAR的检测性能与值有关,可通过调整值优化检测性能;图5(e)为TMCA-CFAR检测结果,三个目标均能检测到,同样TMCA-CFAR检测结果与剔除个数值有关;图5(f)为2D-CFAR检测结果三个目标均能检测到;图5(g)为TM2D-CFAR检测结果三个目标均能检测到,对比二维CFAR和二维TM-CFAR的检测结果,可以看出在多目标场景下应用剔除技术是有收益的。
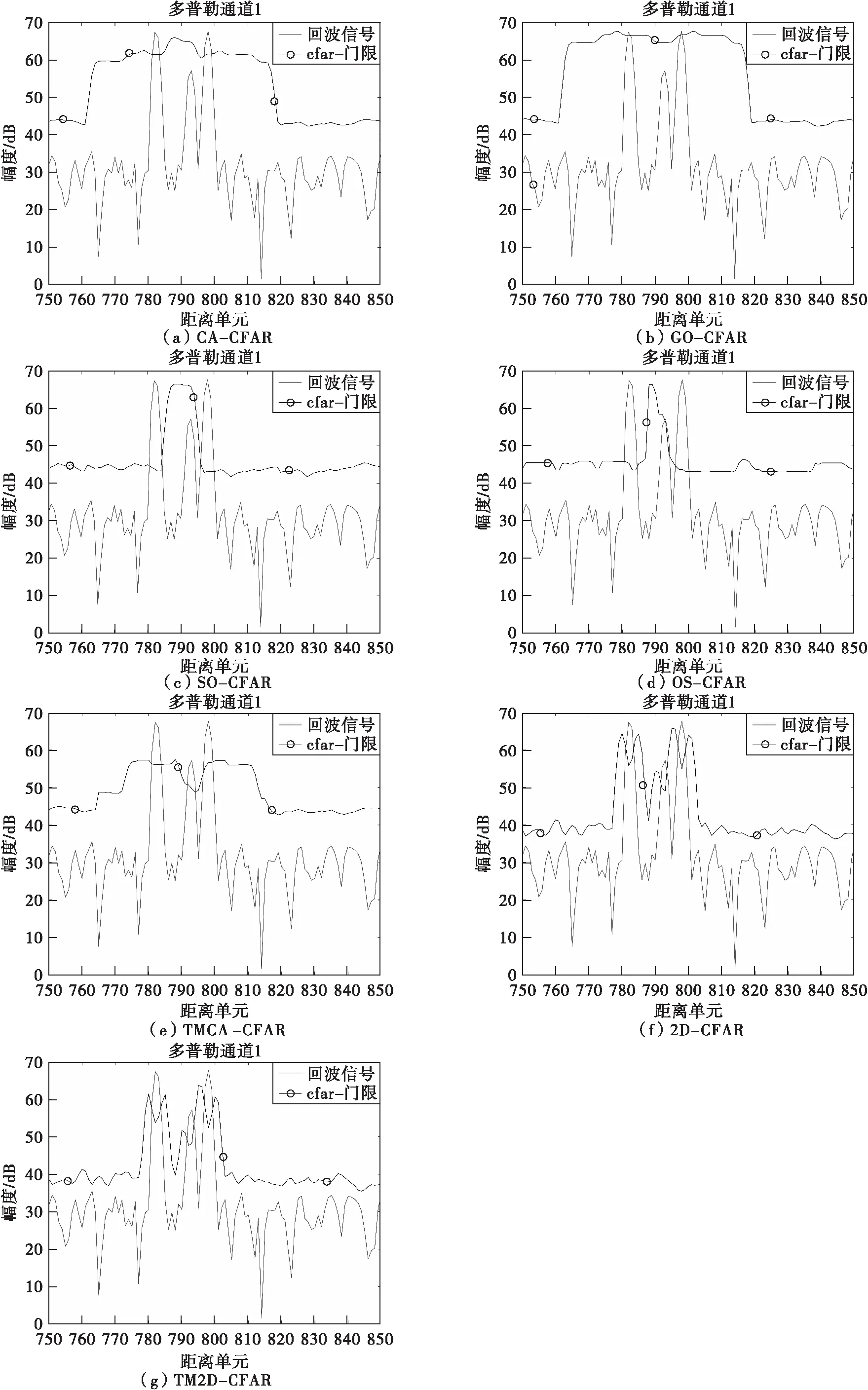
图5 多目标场景下CFAR检测结果
对于一维的排序类CFAR检测来说,在多目标场景下的检测性能与值选择有关,而值与参考窗内的干扰个数有关联,以TMCA-CFAR为例,若剔除个数小于参考窗内的干扰个数,仍有可能出现目标遮蔽现象,而如果剔除个数太多时,造成参与噪声估计的参考单元个数太少,对检测仍有影响。从图5可见,在多目标场景下,2D-CFAR检测器不作剔除或排序等处理就能把3个目标都检测到,可见二维CFAR窗的受干扰影响更小,进一步我们可以推断得出,在多目标场景下,同样使用剔除恒虚警,在二维CFAR参考窗的剔除个数可以少于一维CFAR参考窗,即采用二维CFAR窗的噪声估计会更准确一些。
结合杂波边缘场景和多目标场景的仿真结果,我们可以看出基于二维检测窗的CFAR检测器的检测性能要优于基于一维检测窗的CFAR检测器。
2 相关CFAR工程实现及处理时间统计
2.1 基于GPU的CFAR算法实现
基于中央处理器(Central Processing Unit, CPU)和图形处理器(Graphic Proces-sing Unit, GPU)的异构计算已逐步发展为高性能计算领域的主流模式。CPU的主频比较高,采用多核架构,每个核都能独立完成计算、逻辑和数据读写功能,可以运行操作系统,可以操作外设,并可以配置超大的内存空间和存储空间;GPU是近年来在大数据计算方面发展非常迅速的器件,它拥有超多的运算核心,与CPU相比,每个核心不能单独使用,但每组核心具有一定的管理能力,同时对内存的访问速度比CPU要快的多,这种架构非常适合对整块数据进行并行处理计算。采用CPU+ GPU的异构计算架构使CPU和GPU的优势形成互补,兼顾CPU的复杂任务处理能力和GPU的并行计算能力。
CUDA(Compute Unified Device Architecture)作为GPU高性能计算的主要开发工具之一,已经在计算机、物理、信号处理等众多领域发挥重要作用。本文基于NVIDIA公司旗下的型号为Tesla P6的GPU,使用CUDA C/C++实现CA-CFAR、GO-CFAR、SO-CFAR、OS-CFAR、TM-CFAR以及二维CFAR检测器。其实现流程大致如图6所示。

图6 基于GPU的CFAR处理流程图
如图6所示,首先分配主机与设备内存,在主机中初始化待处理数据和保护单元个数、参考单元个数,剔除个数等CFAR参数后,将这些数据拷贝到设备中,然后执行核函数,根据不同的CFAR检测器类型进行相应的CFAR处理,最终将结果返回到主机中,进行后续处理。
由于OS-CFAR与TM-CFAR正常处理时,需要进行完全排序,排序较为耗时,对它们进行处理上的优化。对于OS-CFAR检测,不进行排序,只对待检单元的采样值和参考单元的采样值的比较,然后判断待检单元采样值是否超过个参考单元的采样值;对于TM-CFAR检测,进行不完全排序,只从大往小只排前k个参考单元的采样值,然后剔除后进行求平均。
对于二维CFAR而言,通过使用纹理内存进行处理优化。纹理内存针对二维空间的局部访问性进行了优化,所以通过纹理内存访问二维矩阵的邻域会获得加速。如图7所示,图7中的4个地址并非连续,一般的缓存中,这些地址不会缓存,如果在这种情况下使用纹理内存而不是全局内存,那么将获得性能的提升。
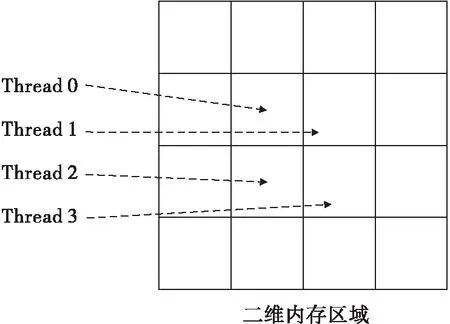
图7 纹理内存应用场景
2.2 相关CFAR运算耗时统计
雷达波束个数为102个,脉冲积累数为20个,回波信号的采样点数为1408个。服务器所用的GPU型号为Tesla P6,CPU型号为FT2000。各CFAR的参考窗长、保护窗长等参数设置与上文的仿真参数设置一致,则各CFAR检测算法在GPU中耗时统计如表2所示。
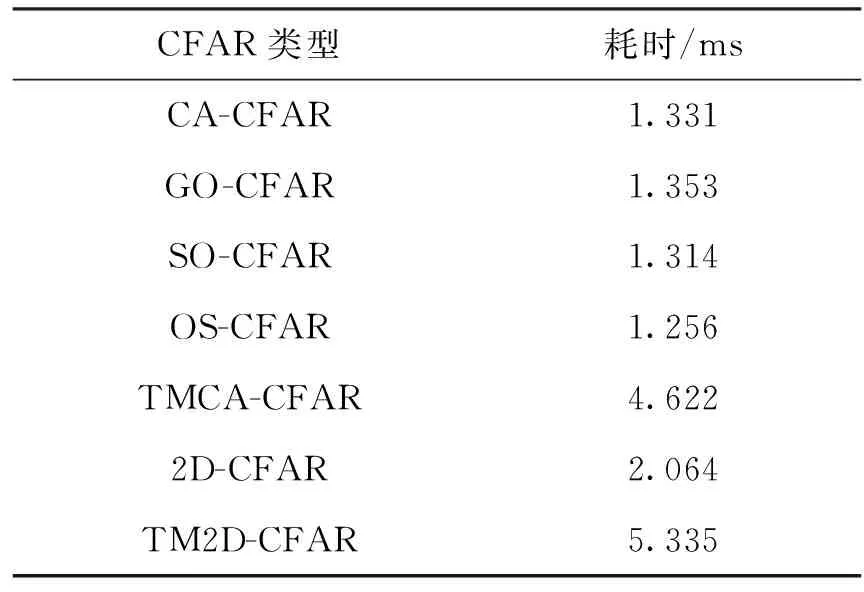
表2 相关CFAR运行时间对比
从表2中可以看出,经优化处理后,OS-CFAR和二维CFAR的运算时间和CA-CFAR、GO-CFAR、SO-CFAR是一个量级的,而TMCA-CFAR和TM2D-CFAR仍涉及到部分排序,相对于其他CFAR检测仍耗时更多。
3 结束语
本文利用雷达模拟器产生地杂波边缘场景、多目标干扰等非均匀杂波场景,通过Matlab仿真分析CA-CFAR、SO-CFAR、GO-CFAR、OS-CFAR、TM-CFAR以及二维CFAR算法的检测性能。在GPU中实现上述CFAR算法,在同等的输入条件下,统计各CFAR算法的运算时间。从实验结果中可以看出二维CFAR算法在杂波边缘场景、多目标干扰场景下有良好的检测性能,同时在工程实现上也具备着高效性和低运算开销,因此二维CFAR在工程应用上是一个不错的选择。由于本文中的数据来源是由雷达模拟器产生的,而现实雷达面临的杂波背景更复杂,因此单一地应用二维CFAR检测不能解决所有问题,此时需要依据杂波图等手段获取真实杂波特性,对检测区域进行CFAR策略分段,对每一段的区域使用最合适的CFAR检测方法,以达到最优的整体检测性能。