基于YOLOv3-tiny 的视频监控目标检测算法
2022-07-21王均成贺超赵志源邹建纹
王均成 ,贺超 ,赵志源 ,邹建纹
(1.重庆邮电大学 通信与信息工程学院,重庆 400065;2.先进网络与智能互联技术重庆市高校重点实验室,重庆 400065;3.泛在感知与互联重庆市重点实验室,重庆 400065)
0 引言
近年来,目标检测算法已经广泛应用于各个视频监控场景,包括车辆检测[1]、行人检测[2]、农业检测[3]、人类异常行为检测[4]等,越来越复杂的目标检测网络展示了最先进的目标检测性能。但在实际应用中,往往需要在视频监控中一些计算能力及内存有限的设备上进行实时目标检测。例如,嵌入式平台视频监控,其可用计算资源一般仅限于低功耗嵌入式图形处理单元(Graphic Processing Unit,GPU)。这极大地限制了此类网络在相关领域的广泛应用,使得在资源受限设备上实现实时目标检测非常具有挑战。
为了实现资源有限设备上目标检测这一挑战,人们对研究和设计低复杂度的高效神经网络体系架构越来越感兴趣。而著名的YOLO[5](You Only Look Once,YOLO)则是围绕效率设计的一阶段目标检测算法,它可以在高端图形处理器上实现视频监控目标高效检测。然而对于许多资源受限监控设备来说,这些网络架构参数量大且计算复杂度较高,使得在嵌入式等监控设备上运行时推理速度大幅下降。YOLOv3[6]是YOLO 系列应用在各领域最普遍的算法,YOLOv3-tiny 则是在该算法的基础上简化的,虽然精度显著下降但具有了更少计算成本,这大大增加了在资源受限监控设备上部署目标检测算法的可行性。
本文提出了一种基于YOLOv3-tiny 的目标检测算法YOLOv3-SF,将改进的ShuffleNetV2[7]网络与YOLOv3-tiny架构进行结合,并加入设计的注意力机制模块使神经网络能学习到更丰富的空间位置信息。实验表明,该方法能够有效优化模型的资源占用与检测精度,更适合资源有限的视频监控设备部署。
1 网络架构
YOLOv3 架构是目标检测领域中最优的算法之一。该架构通过调整骨干网结构、多尺度预测等改进方法在保持原系列优势的同时,提高了识别准确率。但是,该架构检测精度提升的同时也导致了相应计算复杂度的提高,而YOLOv3-tiny 则是其较为轻量级的精简版本。显然,对于时效性及存储要求高的监控设备,轻量级架构才是首要的目标检测算法选择。
1.1 YOLOv3-tiny 网络架构
本文所使用的YOLOv3-tiny 网络架构如图1 所示。骨干网络作为目标检测任务的特征提取器,以图像作为输入,输出对应输入图像的多个不同尺度特征映射,随后通过对不同特征进行处理来获取多个预测结果,使模型更好地检测不同大小的目标物体,以此来取得更高的识别准确率。
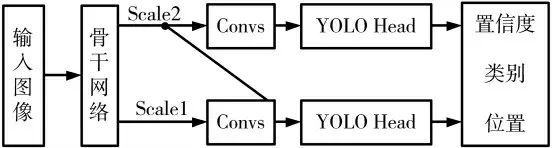
图1 YOLOv3-tiny 网络架构
YOLOv3-tiny 网络架构参考特征金字塔网络的思想,将低级特征与高级特征拼接融合,并从不同尺度提取特征。与YOLOv3 不同,该网络架构只保留了两种不同尺度的网络输出,目的同样是预测不同尺度的对象。预测分支不仅在骨干网络末端输出特征上独立预测,还通过将该特征图上采样到与前期特征图相同大小,然后与大特征图通道堆叠做进一步预测。每个预测框的坐标为tx、ty、th、tw,若预测框中心点相对于特征网格左上角坐标相对偏移量(cx,cy),先验框长宽为pw及ph,则预测框的位置有以下表示:

1.2 全连接注意力混合模块
对于深度卷积神经网络,高级特征包含低空间分辨率的分类信息,低级特征包含高空间分辨率的位置信息。而为了获得更准确的位置信息,许多工作将低级特征与高级特征相结合。然而这些工作一般都是直接将其相加或者拼接在一起,而不考虑通道之间的差异。受SENet[8]的启发,本文认为卷积特征通道之间的相互依赖性很重要。因此,针对图1 中特征融合预测分支部分,本文参考SENet 中利用注意力机制来学习通道间的关联性,提出了将低级特征和高级特征结合的全连接注意力混合模块(Fully-connected Attention Mix Module,FCAMM),如图2 所示。

图2 YOLOv3-SF 网络架构
通过向预测分支中添加全连接注意力混合模块可以更自适应地融合多层次特征,得到具有更高识别能力的特征。具体来说,FCAMM 先将低级特征和高级特征拼接在一起后使用3×3 卷积层来进行通道缩减;然后利用两个全连接层学习不同通道间的非静态、非线性相互内在联系,通道间乘法为通道重新加权生成调制权重;最后,向全连接层输出添加低级特征来执行特征融合。
与文献[8]中标准的SE 注意力模块相比,全连接注意力混合模块则仅保留两个全连接层来学习不同通道特征重要程度,在拥有相似性能的同时进一步降低运算量,能更好利用有限模型容量。另外,注意力模块输出的高级特征再次与骨干网络阶段的低级特征混合,形成类残差结构,能更好地保护特征信息完整性。简而言之,本文所提出的全连接注意力混合模块在计算成本和特征表达之间实现了更有力的平衡。
2 骨干网络
从YOLOv1[5]到YOLOv3,每一代性能的提升都与骨干网络的改进密切相关。本文所采用的骨干网络基于ShuffleNetV2 网络模型,是由旷视在2018 年提出的轻量级卷积神经网络。本文将改进后的ShuffleNetV2 网络作为骨干网络与YOLOV3-tiny 架构进行结合,来用于视频监控系统资源受限设备上的目标检测任务。
2.1 ShuffleNetV2 网络模型
ShuffleNetV2 网络模型根据衡量模型复杂度的指标,并联系理论与实际得到了相关适用的改进策略:(1)使用1×1 卷积核均衡输入输出通道大小;(2)减少组卷积使用;(3)减少网络分支;(4)减少元素级运算。
根据这些策略,引入了图3 所示单元进行网络的构建,其中的S1 即表示步幅为1。即,在开始时先将特征映射在通道维度分离为两个分支,一分支做同等映射,另一分支使用1×1 卷积来使输入输出通道相同,满足策略(1);而且其中的两个1×1 卷积不再是组卷积,满足策略(2);只有两个分支的输出进行拼接及通道混合,符合策略(3);同时通道混合可以和下一个通道分离合并成一个元素级运算,符合策略(4)。

图3 ShuffleNetUnit 结构
ShuffleNetV2 的结构主要是由图3 中的单元堆叠而成的3 个不同的阶段组成,实现了高效卷积。ShuffleNetV2同样可以设定每个模块的通道数,如1.5×、1×,进而调整网络的复杂程度。
2.2 ShuffleNetV2-S 网络结构
本文所使用的骨干网络ShuffleNetV2-S 是ShuffleNetV2的改进版。ShuffleNetV2 在网络的前期结构开始时就利用步幅为2 的卷积及最大池化层来缩小特征图的大小,虽然有效降低了计算成本,但早阶段的低级特征对视觉任务非常重要,过早减小特征图的大小会损害特征表征力,不利于目标检测。受到密集连接[9]和并行结构[10]的启发,重新设计了早期结构StemBlock,如图4 所示。在原有结构的基础上,添加分支以用于加强后期结构前的低级特征传播,鼓励特征重用,然后与原结构使用Add操作连接来满足后续阶段的输入要求。
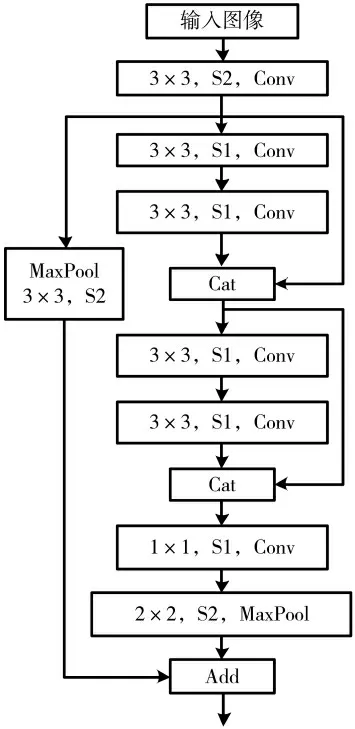
图4 StemBlock 结构
其中,相较于文献[9]网络中的每个层都会与前面所有层在通道维度上连接,本文所设计的StemBlock 中的每个层则仅与前面的两层跳连。这样的设计不仅同样加强了特征传播,而且在一定程度上保证了计算量。然后,并行连接原有结构来保证原网络完整性,并与特征复用分支进行元素级相加实现特征融合。本文所改进的骨干网络与ShuffleNetV2 网络相比,不仅获得了更丰富的低级特征信息,而且维持了网络计算复杂度。
3 实验
本实验所使用的计算机配置为:Intel-Xeon E5-2678 v3 的CPU,GTX1060 的GPU,Windows 10 操作系统,程序在PyTorch 框架下运行。
3.1 数据集
本实验使用来自PASCAL 可视化对象分类挑战2007的数据集,该数据集中有20 个分类,图片大小不一,共包含9 963 张用于训练和验证的图像,其中训练集图片5 011 张,测试集图片4 952 张。在本实验中,所有图片被转换成416×416 大小作为网络输入。
3.2 超参数设置及性能指标
本文中神经网络的主要超参数设置如表1 所示。本文主要使用每秒传输帧数(Frames Per Second,FPS)、均值平均精度(mean Average Precision,mAP)、参数量(parameters,Param)以及模型大小4 个评价指标评判所提出YOLOv3-SF 算法的检测效果。

表1 超参数设置
3.3 实验结果
为了将目标检测运用在资源有限的视频监控设备上,本文所提出的方法是基于YOLOv3-tiny 模型架构,因此本文中的网络模型实验结果主要与YOLOv3-tiny进行了比较。而为了体现YOLOv3-SF 的改进提升效果,同样加入了与1.5×、1×不同复杂度的ShuffleNetV2 的性能对比,如表2 所示。
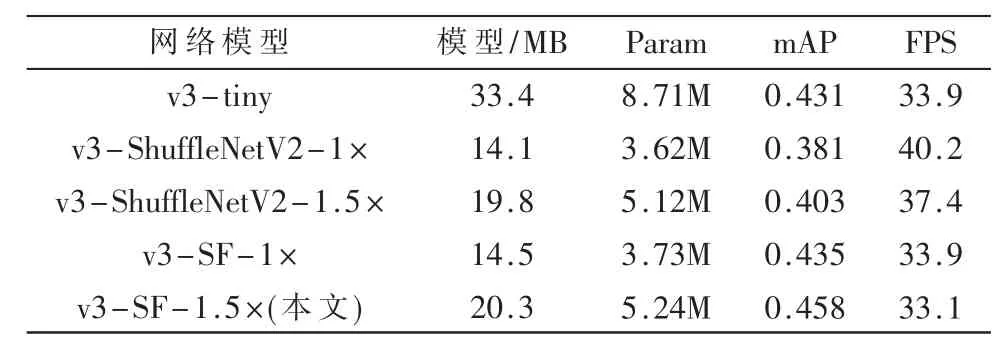
表2 不同网络模型的性能对比
本文所提算法与YOLOv3-tiny 相比参数量降低39.8%的同时,mAP 提高了2.7%,模型体积降低39.2%,而且FPS 基本不变;与对应复杂度的ShuffleNetV2 直接作为骨干网相比,mAP 则有效提升了5.5%。
本文主要采用改进的复杂度为1.5 的ShuffleNetV2作为特征提取网络,以下对比实验均基于ShuffleNetV2-1.5×网络。图5 中展示了VOC 数据集中每个类别目标的具体AP 测试结果。可以看出,本文所改进提出的YOLOv3-SF 算法的检测能力明显高于YOLOv3-tiny 及YOLOv3-ShuffleNetV2。实验结果在共20 个目标类别中仅有瓶子、沙发两类的AP 结果略低于YOLOv3-tiny,但全部高于直接将ShuffleNetV2 作为骨干网络。

图5 每类别目标的测试AP 值
为了验证所提改进之处的有效性,本文通过删除部分网络结构来研究网络的性能。通过表3 所示的消融实验结果可以看出,本文改进后的ShuffleNetV2-S 网络在保持低模型复杂度的同时,mAP 比原始的骨干网络提高了3.7%。再结合FCAMM 融合多层次特征后,总体比ShuffleNetV2 提高了5.5%。因此,本文所改进的骨干网络及提出的全连接注意力混合模块都能有效提升性能,同时保证了轻量级模型规模。
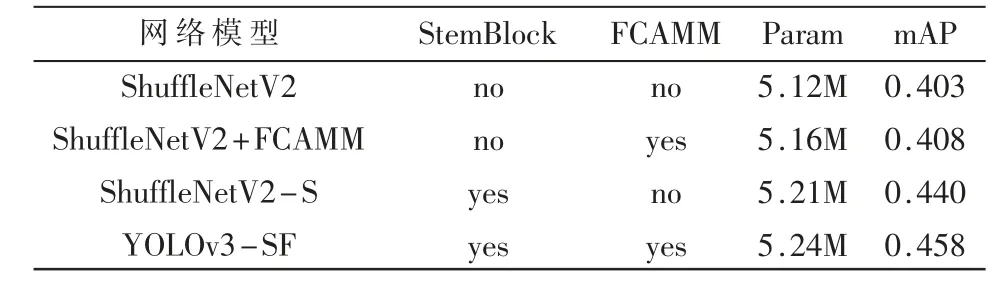
表3 消融实验
本文还测试了在YOLOv3-tiny 架构下不同骨干网络的性能,测试结果如表4 所示。结果表明,ShuffleNetV2-S骨干网络不仅更轻量级,而且同时满足了检测精度及实时性要求。本文算法中改进后的骨干网络相较其他卷积神经网络在降低计算复杂性以及提高模型表达性之间实现更有力的平衡。

表4 不同骨干网络的性能对比
4 结论
本文针对资源受限视频监控系统中传统目标检测算法复杂度高、资源占用大的问题,提出了一种基于YOLOv3-tiny 架构和ShuffleNetV2 网络的轻量级算法。通过对特征传播方式进行研究,本文对架构中的Shuffle-NetV2 骨干网络结构进行了重新设计以加强低级特征复用;并提出了一种基于注意力机制的多层次特征融合模块来丰富目标空间位置信息,最后将该算法在VOC 数据集上进行训练、测试。实验结果表明,本文设计的目标检测算法较YOLOv3-tiny 的检测精度有一定提升,且对于低算力低存储的监控平台,本文方法具有更强的适用性。本文目标检测任务是在资源极其有限的监控设备上运行,检测速度也会更有限,因此下一步还可通过稀疏、量化等修剪方法对网络模型进行优化,提高检测速度。
