基于万维引擎的船舶倾斜试验虚拟仿真系统
2022-07-19杨卓懿
宋 磊,高 攀,杨卓懿,周 佳
(山东交通学院 船舶与港口工程学院,山东 威海 264209)
0 引 言
虚拟现实技术广泛应用于各行各业。在船舶领域,虚拟现实的应用日渐成熟。李建伟[1]研发基于Unity3D的船舶电力推进系统,可实现场景漫游、部件检查和人机交互等,有助于推进电力系统的操作与培训。李超[2]研发游艇虚拟现实系统,实现游艇漫游和驾驶操纵体验。何隽等[3]研发Unity3D船舶虚拟消防训练系统,可实现船员进行安全有效的船舶灭火训练。虚拟现实在倾斜试验方向没得到具体的应用,因此在船舶倾斜试验方面研究开发一套虚拟仿真系统具有重要意义,可促进船舶试验数字化技术应用,为船舶建造工艺和试验提供数字化手段,方便开展试验安全操作评判和试验方案预演评估。针对船舶与海洋工程专业人才的培养,将在课堂较难呈现的试验以虚拟仿真的方式实现实时在线交互操作,可系统直观地理解船舶倾斜试验的基本原理,促进理论知识与试验教学的结合。该系统以高度逼真的模型和场景还原真实试验境况,有助于激发学员对倾斜试验的学习兴趣,可为船舶制造行业提供新的解决方案和数据参考。
1 仿真系统整体设计
该系统以某64 000 t散货船的倾斜试验为例,构建包括船体建模、贴图和渲染、功能实现及数据处理等模块。系统利用3Ds Max建模软件、Unity3D和万维引擎平台等开发工具。万维引擎是一款基于Unity的虚拟仿真开发平台,该引擎将常用功能指令按模块化高度封装,使用Excel编辑器进行相应的代码功能编辑和存储。该系统采用万维引擎语言与C#语言相结合的开发方式,可大幅提高开发效率[4]。系统整体设计流程如图1所示。

图1 系统整体设计流程
2 倾斜试验数学模型
船舶倾斜试验的目的是确定船舶的质量和重心位置,而初稳心高hGM是衡量船舶稳性的重要指标。因此,求得船舶重心位置的关键是求出初稳心高hGM,其数值可由式(1)确定,即
(1)
式中:zG为船舶重心垂向坐标;zM为船舶稳心垂向坐标;zB为浮心垂向坐标;rBM为横稳心半径,可根据型线图或型值表求得。
2.1 船舶倾斜试验原理
当船舶处于正浮状态时水线为WL,其排水量为Δ。如果将A处质量为p的压铁横向移动至A1,船舶将产生横倾,此时船舶状态处于新水线W1L1,如图2所示,其中:G为船舶重心;M为横稳心;B为浮心;B1为浮心移动后位置;φ为横倾角。
图2 横向移动压铁时的船舶横倾示例
由船舶载荷移动的计算公式可知:
(2)
将式(2)代入式(1),得:
(3)
由分析可知:测量的横倾角φ是求出重心垂向坐标的关键。
2.2 船舶倾斜试验方法
在进行试验前,先测量艏部、艉部和肿部的吃水及水的质量密度,求出排水量。倾斜试验所用的移动重物为生铁块,将其分为4组堆放于甲板指定位置,每组质量分别为p1、p2、p3和p4,确保每组重物的质量相等。倾斜试验移动质量布置如图3所示。

图3 倾斜试验移动质量布置
3 倾斜试验仿真系统的实现
3.1 建模与渲染
为使所建船舶模型更真实、效果更逼真,基于3Ds Max采用Extrude Line Tool及Editable Poly的建模方法对实船和码头等物体进行1∶1建模[5]。建模流程如图4所示。
图4 建模流程
待所有模型建成后需要保存为FBX格式的文件,导入Unity3D进行模型的贴图和渲染。散货船模型如图5所示。

图5 散货船模型
3.2 船舶倾斜运动算法
在场景中,当移动甲板上的压铁后,船舶会根据其移动情况和各压铁当前位置发生不同的横向倾斜运动,并在一定空间位置来回摆动,这是对各船舱读取摆锤数据的过程。船舶的横倾运动稳定性和精度至关重要,可直接影响试验数据的准确性。
实现船舶倾斜运动的算法较多,例如:分别对4个铁块8种移动情况进行运动算法实现;对船体模型尺寸和位置进行分析,选取公共基准点,建立函数关系,实现不同压铁移动情况下的横倾运动。由于涉及压铁移动步骤较多,选取使用多个功能函数实现起来比较繁琐,并且不便后续功能调用和维护处理,不具有通用性,因此选取第2种手段进行实现。船舶横向倾斜运动算法流程如图6所示。
图6 船舶倾斜运动流程
(1)建立船体横倾运动坐标系
通过对散货船模型的尺寸和位置分析,考虑船舶整个模型结构,在船舶模型为零点的位置建立一个空的子物体并进行位置的初始化,将整个船舶模型放在该空物体下。选取的位置是几何零点即模型的中心位置,方便后续对船舶横倾运动的控制。
(2)定义参数变量
考虑在压铁移动后船舶产生反复的横倾运动,角度实时改变,因此需要定义船舶向左旋转和向右旋转时的区间变量,该区间的大小即左右倾斜运动区间。为使在读取数据时更好地控制船舶旋转速度,经过摆动幅度计算和多次速度验证,最终选取60(°)/s为最佳默认值,过大或过小均会影响摆锤读数。需要定义摆锤的运动时间变量,控制左旋转和右旋转的时间,而旋转运动时间长短由初始角度和目标角度之差的绝对值与旋转速度决定。目标角度值是在合理区间内的随机数。
(3)运动过程实现
该功能通过C#语言脚本与万维引擎语言相结合的编程手段实现。通过C#语言实现主要算法功能,通过万维引擎语言实现最终的变量参数赋值和倾斜运动启停。C#语言功能强大,实现具体功能较为方便简单;万维引擎封装度高,对参数设置和功能调用简单,两者结合可最终实现运动的功能。
3.3 倾斜试验功能实现
与传统软件相比,该系统具有实时与场景内物体进行交互、实时观察船舶运动现象等特点,使复杂的理论知识通过一系列的动作过程直观展示出来。倾斜试验的内容仿真通过基础知识、练习和考核等手段实现。基础知识是对试验内容的认知学习。练习是对学到的知识进行操作学习。考核是对所学内容熟练掌握后的测评。用户可根据试验掌握情况反复操作练习,通过完整的学、练、考操作流程相互配合,直至操作者完全掌握所有内容为止。
倾斜试验包括试验准备、实施和试验报告等主要内容,用户需要对试验内容进行学习和场景的交互练习,根据掌握情况对试验内容进行考核。功能模块流程如图7所示。
图7 功能模块流程
(1)试验准备。试验准备任务包括气候条件选择、试验地点选择、船舶状态、试验器材和人员准备等,用户通过点击交互界面弹出文本提示和试验器材模型的形式对试验准备进行详细认知。
(2)试验实施。试验实施步骤为全船性检查及认可、测量环境参数、放松缆绳、初始吃水测量、初始状态读数和压铁移动状态等。该过程是试验的核心部分,压铁移动和缆绳放松的操作通过使用鼠标点选指令和Animation动画相结合的形式实现。在数据读取摆锤数据引导过程中使用动态特效等手段,增加场景交互的友好性。
(3)试验报告。试验报告包括倾斜试验概况、试验时船舶吃水、摆锤读数记录表等,可通过万维引擎中的WebGL截屏方法以PDF的格式上传至课堂平台。
4 仿真系统应用
船舱摆锤数据获取是系统核心部分,通过仿真系统对1号船舱、3号船舱和5号船舱进行多次摆锤数据读取,将每次移动后的读数求取平均值标注到数据表格中。为保证测量结果准确性,需要进行误差检查和限值设定,当偏离拟合直线4%时需要对其分析原因并判断是否需要重新试验。
4.1 仿真系统摆锤数据获取
测试压铁移动顺序为P1-P3-P3-P1-P2-P4-P4-P2,每个铁块在每次移动后获取5次摆锤数据。以1号船舱压铁移动全过程摆锤读数数据为例进行分析[6-7],如表1所示,其中:移动顺序0为船舶初始状态下的摆锤读数。
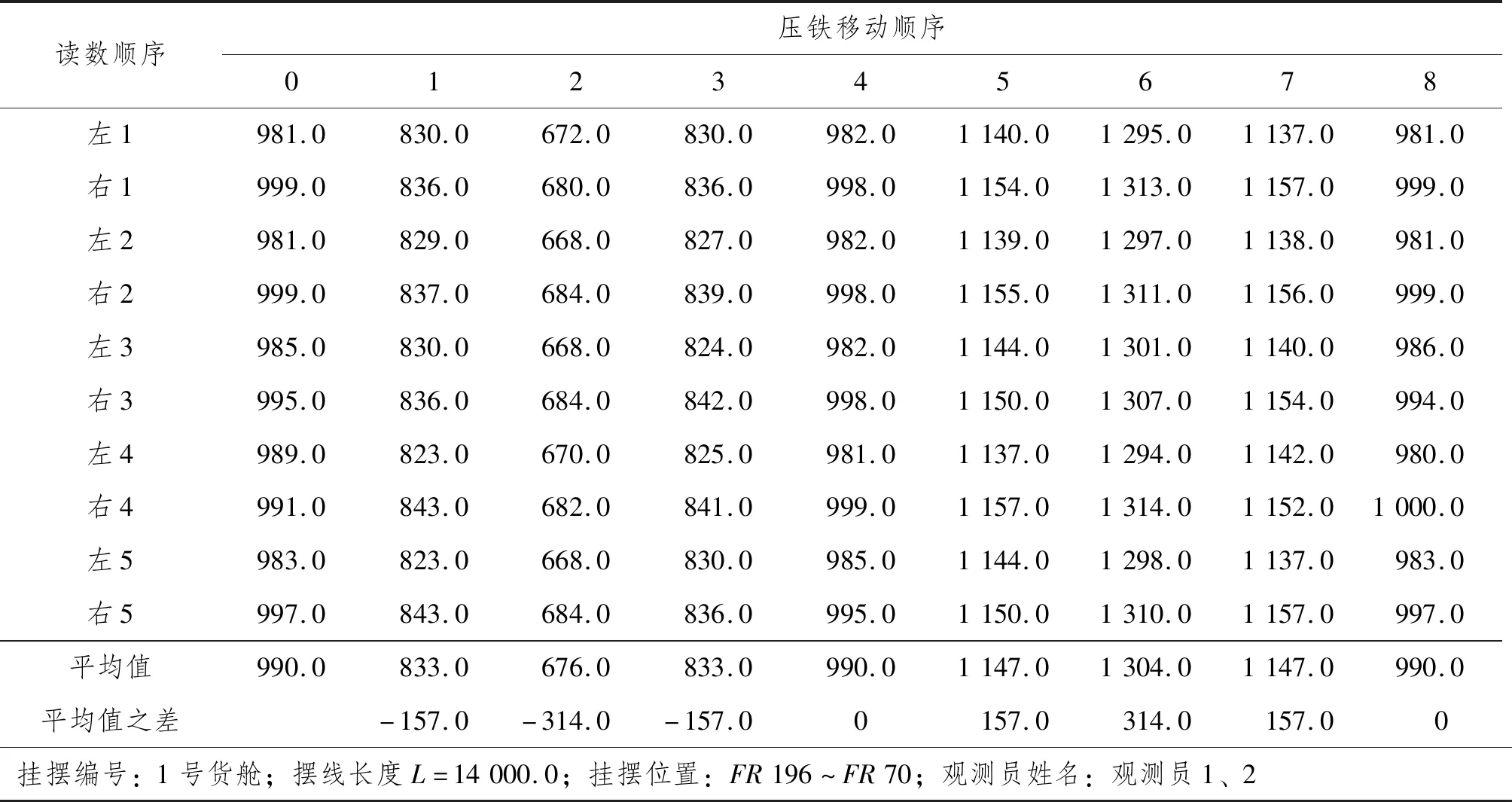
表1 仿真系统1号船舱摆锤读数 mm
1号船舱摆锤读数平均值之差线性回归拟合直线参数和数值分析如表2所示。

表2 仿真系统1号船舱摆锤数据分析
1号船舱线性回归分析如图8所示。通过1号船舱线性回归拟合直线可得,绝大部分点均在拟合直线上,试验数据符合要求。对1号船舱摆锤数据极限偏差数值进行计算,筛选可剔除的点。对极限偏差数值进行分析,在允许的±4%极限偏差范围内,较易找到可剔除的点。为进一步验证该系统试验数据准确性,需要对实船试验获取的试验数据进行分析和对比,最终得出结论。
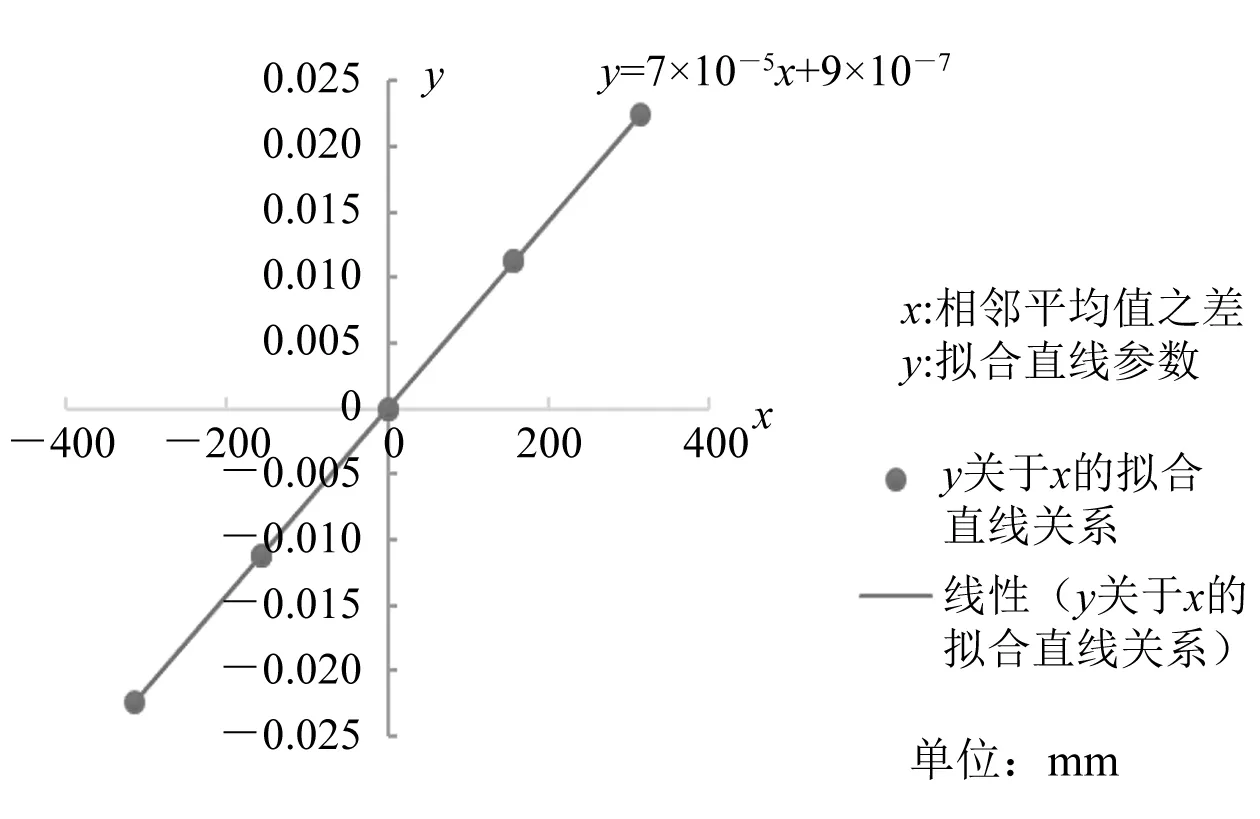
图8 1号船舱线性回归分析
4.2 实船试验时的1号船舱摆锤读数数据
对6 4000 t散货实船在倾斜试验时进行试验数据采集,得到1号船舱摆锤读数,如表3所示。采用与第4.1节相同的数据分析方法,对实船1号船舱摆锤读数进行处理分析,将获取的摆锤数据与实船的摆锤数据进行对比分析。对比结果如表4所示。通过试验数据对比可知:系统摆锤与实船摆锤读数平均值偏差在合理范围内,符合系统设计要求。
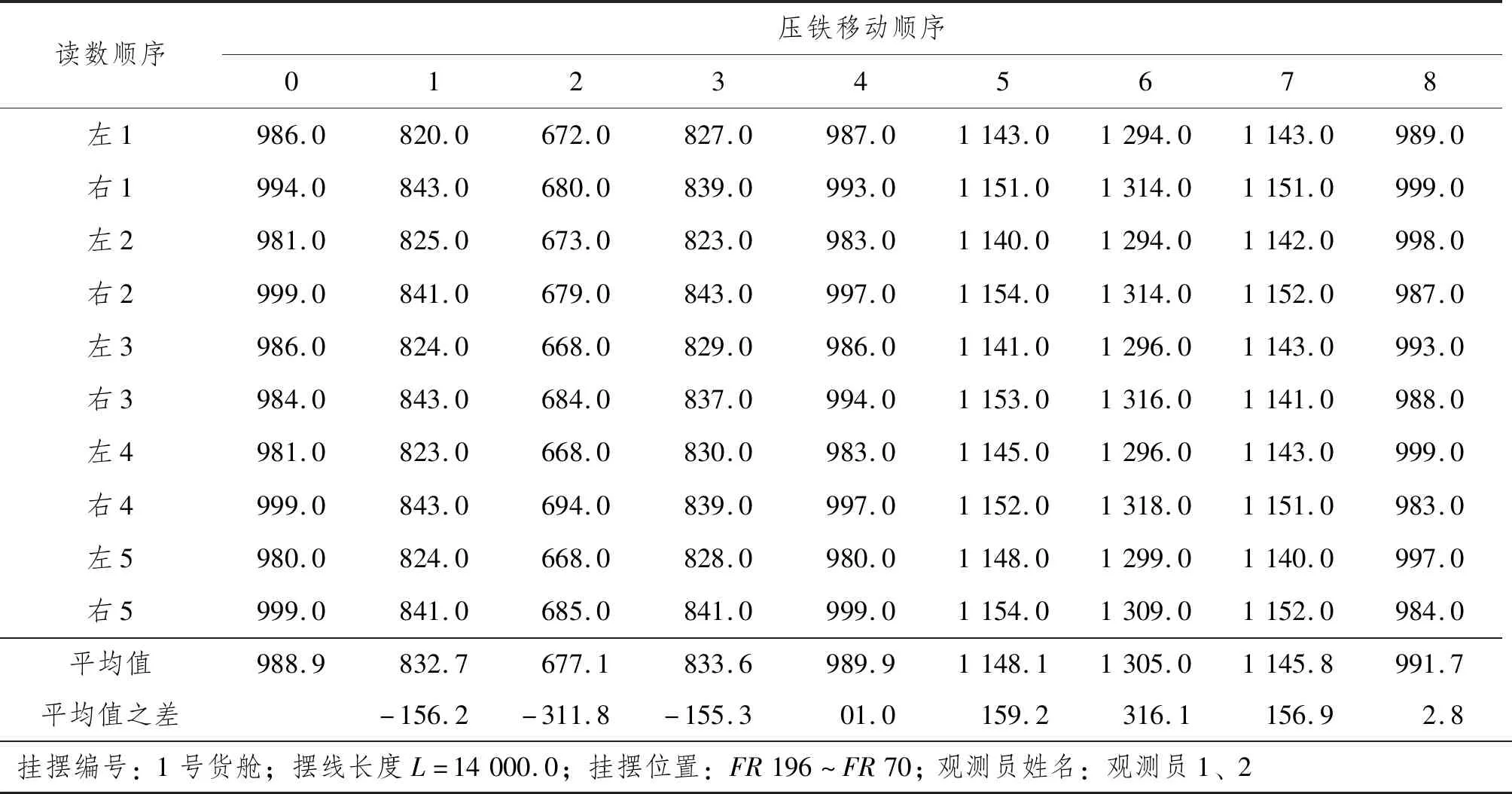
表3 实船1号船舱摆锤读数 mm

表4 系统摆锤数据与实船摆锤数据对比 mm
5 结 论
通过对所开发的虚拟仿真系统进行测试,基于3Ds Max的船体建模与万维引擎的功能开发方法有效,该系统可按照设定的压铁移动顺序获取摆锤数据,测试所获取的试验数据与实船试验数据偏差在合理范围内,验证该系统符合使用要求。这种基于虚拟现实的仿真系统可对船舶建造工艺和大型试验开展数字化的方案评估和验证,同时可辅助学员操作培训,体验交互式学习方式,增强试验真实体验感。当前,所开发的虚拟仿真系统仅针对某散货船进行船舶倾斜仿真试验,下一步在系统升级后可考虑实现多种船型的切换试验,在交互方式上可加入头盔式虚拟现实功能,实现沉浸式的3D交互模式。
