光学反馈线性腔衰荡光谱技术不确定性*
2022-07-19王兴平赵刚焦康陈兵阚瑞峰刘建国马维光
王兴平 赵刚 焦康 陈兵 阚瑞峰 刘建国‡ 马维光
1) (中国科学技术大学精密机械与精密仪器系,合肥 230026)
2) (山西大学,量子光学与光量子器件国家重点实验室,太原 030006)
3) (中国科学院合肥物质科学研究院,安徽光学精密机械研究所,合肥 230026)
4) (山西大学,极端光学协同创新中心,太原 030006)
腔衰荡光谱技术是一种高灵敏的腔增强分子吸收光谱测量技术,由于激光频率噪声大,导致激光到腔耦合效率低,严重限制了其对痕量气体的探测灵敏度.光学反馈可以有效压窄半导体激光器的线宽,提高激光到外部谐振腔的耦合效率.本文基于精细度为7800 的Fabry-Pérot 腔,发展了光学反馈线性腔衰荡光谱技术.首先从光场相位的角度给出了线性腔光学反馈的原理,然后分析了影响测量不确定性的因素,包括光学反馈率、衰荡信号触发阈值、探测器相对透射汇聚光斑位置等.实验结果表明,通过设置低反馈率(3%自由光谱区间)、高衰荡信号触发阈值(90%腔模幅度)以及将光斑聚焦到探测器有效面中心等措施,结合光学反馈效应,可将空腔衰荡时间的相对不确定度提升至0.026%,远优于传统腔衰荡技术获得的典型值.系统在积分时间为180 s 时,获得探测灵敏度为1.3×10–10 cm–1,对应甲烷的最小可探测吸收体积浓度为0.35×10–9,从而满足了碳监测的要求.
1 引言
腔衰荡光谱技术(cavity ringdown spectroscopy,CRDS)是一种新型的气体检测技术,具有高灵敏、免标定、实时在线等优势[1−3].自1985 年由Crawford[4]提出“腔衰荡”一词以来,这项技术已被广泛应用于镜面反射率测量[5,6]、大气痕量气体浓度测量[7−9]、分子精密光谱测量[10−12]等领域.
光学腔是CRDS 的核心器件,激光耦合进入光学腔后会在两个反射镜之间来回反射,从而增加激光与腔内介质的作用距离.在红外波段,基于先进的镀膜技术[13,14],腔镜反射率可以达到99.998%,反射次数超过10 万次.腔增强直接吸收光谱技术(cavity enhanced absorption spectroscopy,CEAS)是最简单的腔增强技术,其通过直接测量腔透射光的衰减量来反演气体浓度.但CEAS 受到了激光相对强度噪声以及激光到腔耦合效率的影响,其可以获得的探测灵敏度较低.而在CRDS 中,当激光频率和腔纵模频率达到共振时,在腔内会建立起很强的光场,当腔内光强达到阈值条件时,切断输入激光,此时在腔内,光场由于腔内损耗(包括腔镜损耗以及气体吸收)而衰减,将在腔的透射端观测到随e 指数变化的衰荡信号.通过测量腔内有无气体时衰荡时间的变化,就可以获得气体浓度值.因为CRDS 测量的是衰荡时间信息,因此不受激光强度噪声的影响,其探测灵敏度优于CEAS,可以达到10–8—10–12cm–1[1].
CRDS 中的衰荡时间一般在µs 量级,为了获得准确、稳定的探测,需要高线性度、宽带宽的探测系统.另外,对于高精细度光学腔,其纵模线宽通常在kHz 量级.然而,由于激光频率噪声很大,限制了激光到腔的耦合效率.例如,应用中最常用的半导体激光器线宽通常在MHz 量级[15],其到高精细度光学腔的耦合效率可能只有1%.低耦合效率会导致极低的腔透射光强,降低CRDS 衰荡信号信噪比,增加探测器噪声以及电子噪声的影响,降低气体探测灵敏度.
通过压窄激光线宽可以有效地提升激光到光学腔的耦合效率.目前,常用的压窄激光线宽的方式主要为PDH (Pound-Drever-Hall) 锁频技术和光学反馈技术[1].PDH 锁定[16]通过调制激光频率然后解调腔的反射光强,获取误差信号,通过纯电学反馈的方式直接反馈控制激光频率,实现激光到腔的锁定,压窄激光频率噪声.尽管PDH 锁定是一个十分有效且强大的频率锁定技术,但这种方法不适用于激光线宽远大于外部光学腔纵模线宽的情况,因此很难实现半导体激光器到高精细度腔的锁定.区别于PDH 技术,光学反馈技术[17,18]是一种光学注入锁定方式,其利用从光学腔前镜出射的腔内泄漏光作为反馈光,返回激光器内部实现激光到腔的锁定.同时反馈光作为激光的种子光源,减少了激光器自发辐射的影响,压窄了激光出光线宽.同时,光学反馈技术独特适用于半导体激光器.早在1987 年,Dahmani 等[19]就通过光学反馈将一个半导体激光器线宽压窄了1000 倍(从20 MHz压窄到20 kHz).2015 年,Kassi 和Burkart[20]将激光器通过光学反馈锁定到超稳腔上,再通过单边带调制器实现激光频率调谐,然后结合PDH 频率锁定技术锁定到另一个高精细度的光学腔进行气体测量,实现了2×10–13cm–1·Hz–1/2的探测灵敏度.这一结果十分接近噪声免疫腔增强光外差分子光谱技术获得的探测灵敏度[21,22].
2004 年,Morvelle 等[23]发展了光学反馈腔增强光谱技术(OF-CEAS),通过光学反馈提升光到腔的耦合效率,从而提升探测灵敏度.OF-CEAS通常采用由三面镜组成的V 型腔[18],这种腔结构可以避免腔前镜直接反射光的影响.但是三镜腔内会出现奇偶模的现象,增加了信息提取的复杂性,并且在V 型腔两臂不严格相等的情况下,其透射强度表现出调制的效果.另外相较于更加传统的两镜腔,由于第三面镜子的引入,腔的精细度会下降.2021 年,本课题组[24,25]对光学反馈线性腔增强光谱技术进行了理论研究和实验验证,证实了光学反馈和线性腔可以有效地结合.为了提升探测灵敏度、简化腔精细度定标过程,本课题组[26]继而提出了光学反馈线性腔衰荡光谱技术,利用光学反馈提升耦合效率,从而提高了CRDS 信号的信噪比.
本文主要研究了影响光学反馈线性腔衰荡光谱技术不确定性的相关因素,为提升这种技术的可靠性和应用性提供依据.本文首先从光场相位角度解释了腔前镜直接反射光不参与光学反馈频率锁定的原因,证实了反馈相位的关键作用.并在精细度为7800 的Fabry-Pérot (FP) 腔上进行了光学反馈线性腔衰荡光谱技术的实验研究,重点分析了光学反馈率、衰荡信号触发阈值、探测器相对透射汇聚光斑位置这3 个变量对系统不确定性的影响.最后以空气中的甲烷为例,对其浓度进行了测量.
2 基本原理与实验装置
2.1 线性腔光反馈效应
在光学反馈中,外部高精细度谐振腔的腔内泄漏光作为窄线宽种子光源,返回激光器内部,提高了种子光振荡的模式竞争优势,压窄了激光出光线宽,实现注入锁定[25].而光学反馈效应与反馈光的相位有十分密切的关系,当返回激光器内部的外部光与激光器内部光场的相位一致时,可表现出频率锁定的作用,而当外部光与激光器内部光场的相位存在一定偏差时,光学反馈的作用会发生减弱,当相差超过相位裕度(定义为2π/10)[27]时,就难以观察到光学反馈作用.以下是针对线性腔光学反馈系统,从光场相位的角度解释直接反射光与腔内泄漏光对光学反馈的不同作用.
如图1 所示,设激光与腔的耦合角频率为ω,光波波长为λ(λ2πc/ω,c为光速).激光器内谐振腔的腔长为l1,l1n1λ/2,激光器出射端解理面到激光器出射表面距离为l2,激光器到参考谐振腔的腔前镜的距离为l3,设高反镜的增透膜和高反膜厚度相等且为l4,l4(n2+1/4)λ,高反镜基片厚度为l5,外部谐振腔的腔长为l6(l6n3λ/2)(以上长度均为等效长度,n1,n2,n3为整数).
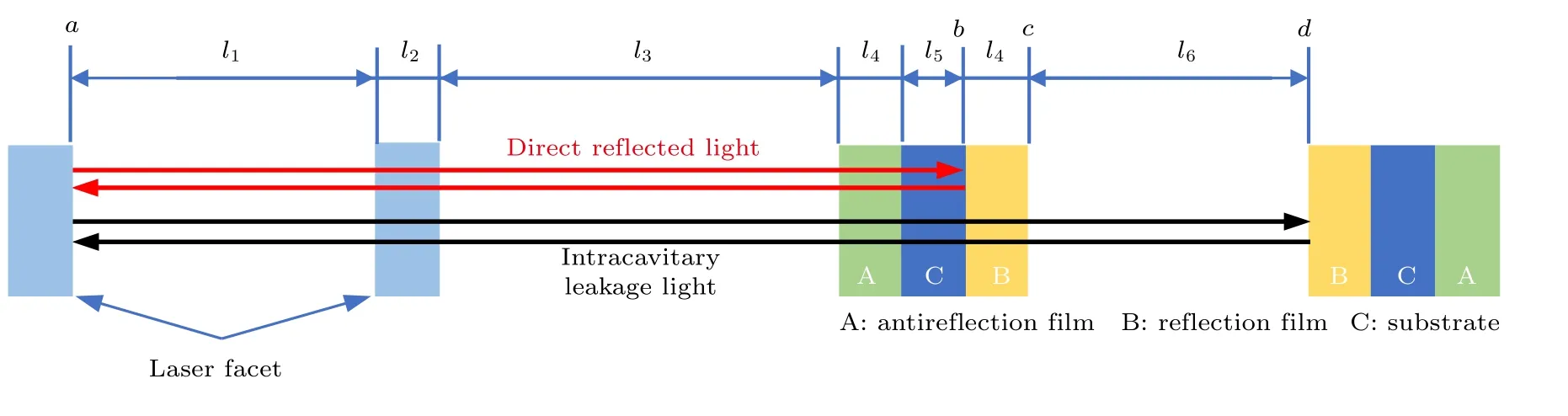
图1 直接反射光与腔内泄漏光在线性腔光学反馈系统中的光路示意图Fig.1.Schematic diagram of light path of direct reflected light and cavity leakage light in linear cavity based optical feedback system.
由谐振腔内驻波性质可知,设光场在远离激光输出端一侧的解理面(a点)的相位为0.因为光在激光腔内以及外部光学腔共振要满足驻波条件,因此l1和l6都等半波长的整数倍.此外,为了使得腔内泄漏光满足光学反馈条件,要求腔内泄漏光返回至a面反射后的光场(传播路径如图1 黑线所示)与激光内场同相.这就要求:

其中 2π 是由于光场在d面和a面反射引起的半波损,m为整数.
而此时,对于腔的直接反射光,返回至a面反射后的光场(传播路径如图1 红线所示)的相位等于:
其中k为整数.(2)式右边2π 项是由于腔的直接反射光在a点和b点反射经历半波损耗引起的.同时对比(1)式和(2)式,可以发现由于腔的泄漏光两次通过腔镜高反膜,造成了 (4n2+1)π 的相移,从而导致直接反射光与泄漏光相位相反.因此当泄漏光引起光学反馈时,直接反射光不会对激光产生影响.
由以上分析结果可知,当激光与谐振腔发生频率共振时,通过控制反馈相位使得腔泄漏光满足光学反馈要求时,腔前镜直接反射光不会产生光学反馈作用.因此激光将被锁定到腔模频率上,实现注入锁定.
2.2 实验装置
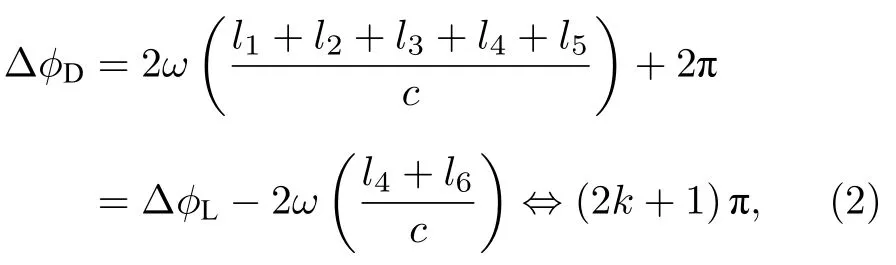
图2 所示的是光学反馈线性腔衰荡光谱装置.光源为一个经济型分布式反馈(DFB)激光器(Eblana,EP1653-7-DM-TO56-A04),采 用TO 封装,输出连续波激光,出射功率为10 mW.激光中心波长为1654 nm,可测量位于6046.9 cm–1处的CH4吸收线.激光器通过一个散热座放置在精密位移平移台(PTS)上,其出射光依次经过腔模匹配透镜(lens1,2)、二分之一波片(λ/2)、偏振分束棱镜(PBS)和四分之一波片(λ/4),最后耦合进入光学谐振腔,腔的透射光经透镜汇聚后送入光电探测器(Thorlabs,PDA10CS2).探测器带宽为13 MHz,噪声水平为46 pW·Hz–1/2.光学反馈相位通过PTS进行粗调,同时使用粘在一个反射镜后端的压电陶瓷(PZT)进行细调,并通过LabVIEW 程序进行实时反馈控制.反馈控制的误差信号通过判断腔模透射信号几何对称性获得.光学反馈率使用λ/4 进行调节,通过旋转λ/4 的角度改变激光的偏振态,调整腔反射光透过PBS 的比例,从而改变反馈回激光器的光强大小.这种反馈率的调节方式不会影响腔的入射光强.光学谐振腔是由两片平凹镜组成的FP 腔.腔镜反射率为99.96%,对应谐振腔精细度约为7800.两个腔镜之间由一根长为39.4 cm的殷钢管支撑,对应腔的自由光谱区(FSR)为380 MHz,腔模线宽约为50 kHz.
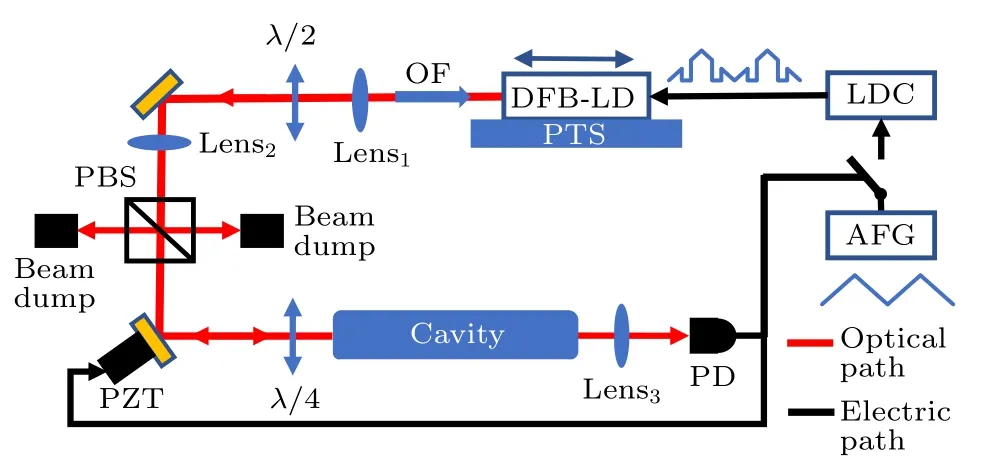
图2 光学反馈线性腔衰荡系统装置图Fig.2.Diagram of experimental setup for optical feedback linear cavity ring-down spectroscopy.
腔衰荡信号的产生是通过关断激光器输入电流实现的.当透射光强达到触发阈值时,一个自制的高速电子选择开关(带宽1 GHz)将切断激光控制器的模拟调制输入,激光器驱动电流快速下降到出光阈值以下,此时在腔的透射端将观测到一个衰荡信号.在等待衰荡信号采样完成之后,电子开关将闭合,激光器重新恢复波长扫描状态.我们在实验中发现,尽管激光器电流可以快速恢复(达到0.5 µs),但是激光器的波长恢复相对滞后(需要ms量级),在波长恢复过程中会重新激发未知频率的激光与光学腔发生共振,并再次触发衰荡信号.为了避免这种情况,在闭合电子开关后,电子开关将静默等待一段时间(3.4 ms),在这一时间内不执行阈值判断[26].通过以上操作,在光学腔输出端可以持续测量腔衰荡信号.光电探测器输出的衰荡信号通过数据采集卡送入计算机,并通过LabVIEW程序对衰荡信号进行e 指数拟合,以获取衰荡时间.
3 分析与讨论
3.1 触发与衰荡信号
由于在光学反馈过程中,需要采集完整的腔模以便判断其对称性,进而实现反馈相位的实时控制,因此,选择在腔模下降沿对阈值触发条件进行判断.实验采集到的触发信号以及腔模信号见图3(a),其中图中方框标记部分被放大在图3(b)中显示.图中红线为触发信号,初始状态为高电平,此时激光电流被连续扫描;黑线为腔模信号.当激光频率与腔模匹配时,将在腔透射端观测到激光出射,因此透射探测器信号出现高电平.当激光电流继续被扫描,腔模出现下降沿并且到达触发阈值时,触发信号将迅速变为低电平(下降时间<0.2 µs),高速电子开关将切断激光电流控制器的模拟调制输入,产生一个衰荡信号.选择电流关断之后8—10倍衰荡时间腔透射信号(黑色曲线)作为拟合信号,用单指数函数进行拟合,获得衰荡时间.
图3 (a) 腔透射 信号(黑线)与触发信号(红 线);(b) 为(a)图中蓝色方框的放大图Fig.3.(a) Cavity transmission signal (black line) and trigger signal (red line);(b) an enlarged view of the blue box in Figure (a).
对于腔衰荡光谱系统,系统的灵敏度以及准确性取决于衰荡时间的不确定性,通常使用空腔衰荡时间的相对不确定度(σ(τ)/τ)来衡量CRDS 的性能[28].以下对光学反馈率、探测器相对透射光斑位置、衰荡信号触发阈值电压对相对不确定度的影响进行了分析.
3.2 光学反馈率
光学反馈率在光学反馈频率锁定技术中是一个十分重要的参数,它决定光学反馈处于不同的状态,如果要有效地压窄激光线宽,反馈率应该10–7—10–4区间.然而,由于反馈率受到多种因素的影响,包括激光到腔的耦合效率、反馈光到激光的耦合效率、光路上的损耗等,很难通过直接测量的方式获得准确的反馈率.通过理论模拟发现,提高光学反馈率,可以获得更宽的频率锁定范围,在实验上表现为腔模透射信号的宽度增加.图4(a)所示的是根据参考文献[24]理论公式计算得到的在不同光学反馈率下激光频率锁定范围,仿真参数如图内标注所示.从图4(a)可以看出,随着反馈率的增加,频率锁定范围逐渐变大.图4(b)所示的是实验测得的不同反馈率下的两个连续的腔模透射信号.实验结果与理论分析保持一致,当反馈率大时,透射腔模宽度增宽.因此,我们得出结论,可以使用透射腔模的时间宽度来表征反馈率的大小.同时,通过利用光学腔的FSR 大小可以对测量得到的腔模宽度进行定标,获得频率锁定范围.
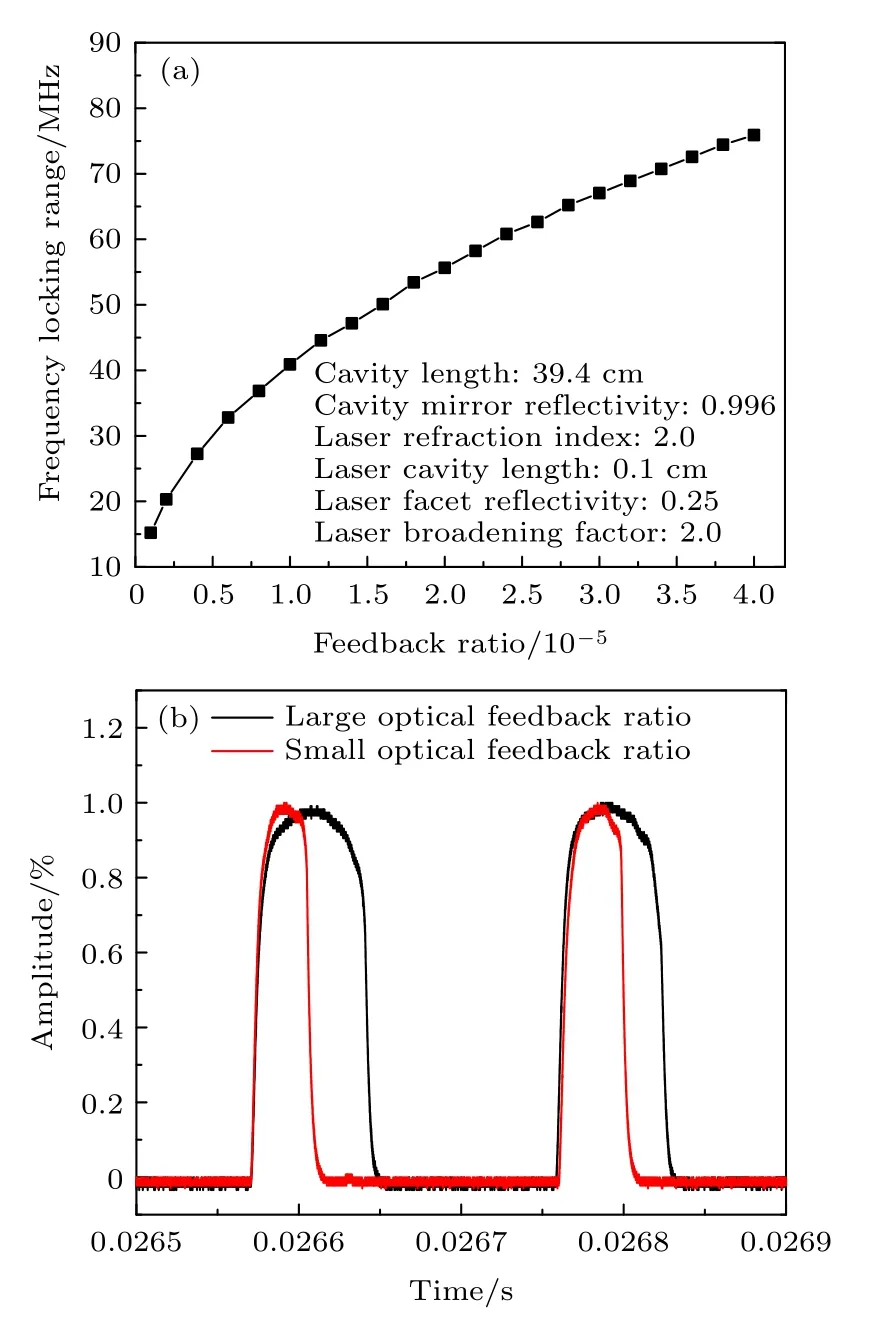
图4 (a)理论计算得到的不同光学反馈率下的频率锁定范围;(b)实验测得不同反馈率下的腔透射信号Fig.4.(a) Theoretical calculation results of frequency locking range under different optical feedback ratio;(b) measured cavity transmission signals under different feedback ratio.
实验中,通过旋转λ/4 的角度改变反馈率,测量了不同光学反馈率对CRDS 信号不确定性的影响.在每一个反馈率下,连续测量了1000 组空腔衰荡时间,并且计算了其相对不确定度以及误差(偏差分布),结果如图5 所示,其中横坐标表示不同的锁定宽度.从图5 可以看出,当频率锁定范围在8.8—45 MHz 之间,空腔衰荡时间的相对不确定度随着频率锁定范围的增大而增大,特别是当值大于28 MHz 后,增长率将提高4 倍.同时其偏差分布也逐渐增大.这可能是由于当衰荡信号触发后,虽然激光器的内部电流被快速关闭,但是外部光学腔内的泄漏光会继续产生光反馈作用,从而影响激光输出特性,并且反馈率越较高的情况下,该作用越明显.但是,同时可以看出,在锁定范围小于45 MHz 时,相对不确定度都在0.12%以下,优于传统CRDS 获得的典型值[29].并且当锁定频率范围小于23 MHz 时,相对不确定度优于0.05%,达到了传统CRDS 可以获得的最优状态[30,31].此时,耦合效率不再是限制CRDS 性能的主要因素,而通过选取噪声等效功率(NEP)更小的探测器,可以进一步提升测量相对不确定度.
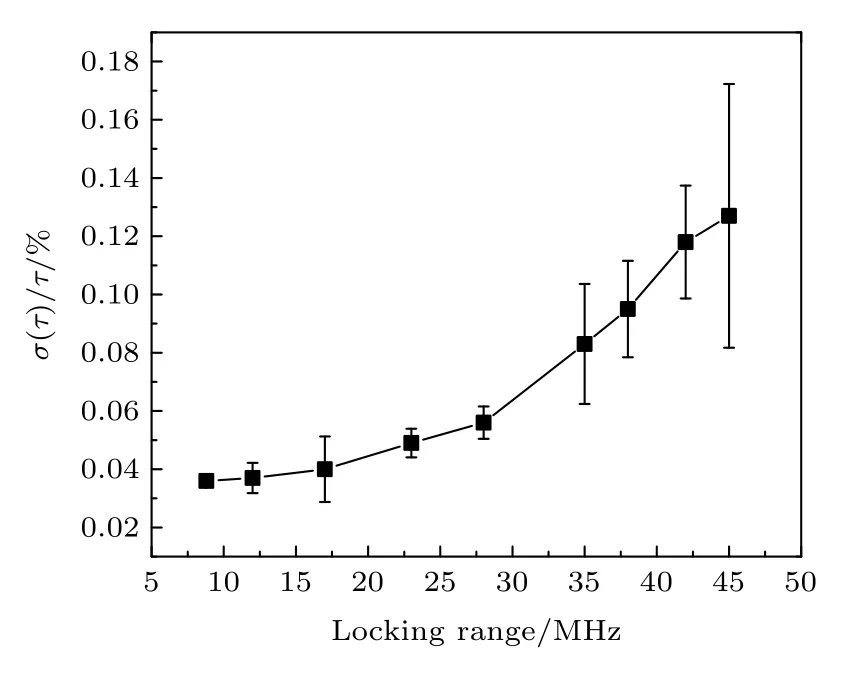
图5 不同频率锁定范围下的空腔衰荡时间相对不确定度Fig.5.Fractional uncertainty of empty cavity ring-down time at different frequency locking ranges.
3.3 探测器相对透射光斑位置
为了验证探测器空间效应对腔衰荡的影响,通过光束质量分析仪(Thorlabs,BP109-IR)测量了FP 腔透射信号的光强分布,结果如图6 所示.其中图6(a)和图6(b)分别为光束质量分析仪Y轴方向以及X轴方向的光强分布测量结果.从测量结果来看,FP 腔的透射信号满足高斯分布规律,并且未观察到高阶横模,排除了高阶横模的存在以及影响.
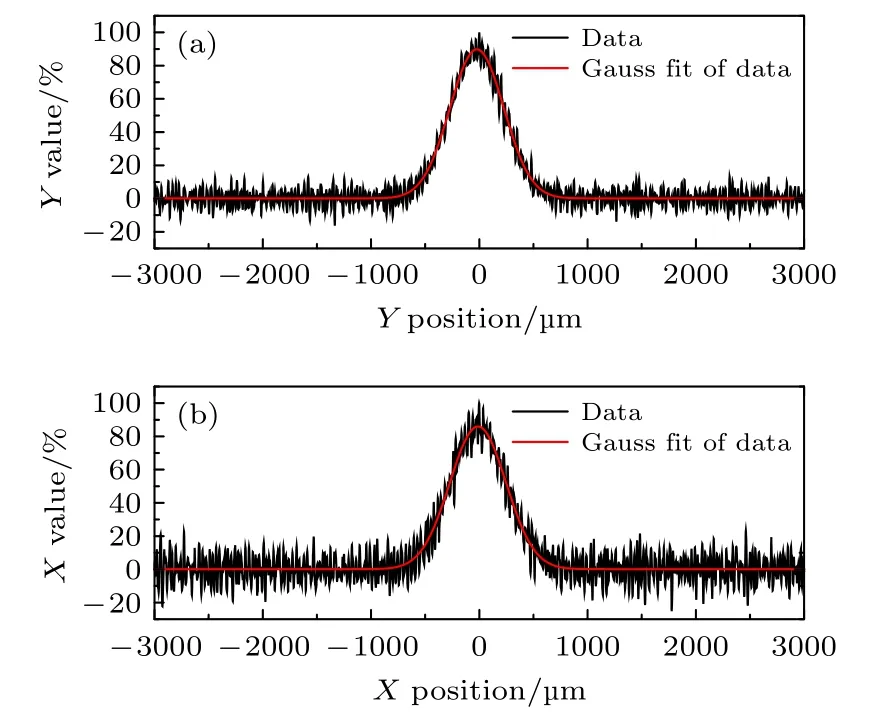
图6 腔透射信号的(a) Y 轴和(b) X 轴方向光强分布Fig.6.Light intensity distribution of the transmitted cavity signal in (a) Y-axis and (b) X-axis direction.
按照高斯光束传播规律计算,FP 腔透射信号经过一个短焦透镜(F=25 mm)汇聚后的光斑大小约为0.06 mm (1/e2).实验中使用的探测器有效探测面直径为0.5 mm.在低反馈率条件下(锁定频率范围为12 MHz),改变探测器的位置,得到的空腔衰荡时间的相对不确定度如图7(a)所示,横坐标表示光斑中心相对探测器中心的距离,图中灰色阴影区域表示探测器的有效探测区域.从图7(a)可以看出,当光斑位于探测器中心附近0.15 mm处时,相对不确定度保持在0.03%附近.当两者距离继续增加,相对不确定将快速恶化.图7(b)为不同距离下单次衰荡信号的拟合残差,红线是当距离为0 时的结果,黑线是当距离为0.25 mm 时的结果,可以看出,当光斑位于探测器边缘处时,拟合残差中存在很大的结构噪声,表示探测器输出信号不再按e 指数衰减.图7(c)所示是衰荡时间与衰荡信号拟合信噪比(信号幅值除拟合残差标准差)在不同探测器位置下的变化.在距离小于0.15 mm时,获取的衰荡时间基本保持一致,同时衰荡信号拟合信噪比保持较高值,可以达到3300.当距离继续变大时,衰荡时间将迅速增加,并且衰荡信号的信噪比也急剧恶化,这样会对气体浓度的反演引入很大的噪声.我们分析造成这个问题的原因主要有两个:一是光电探测器上不同有效面位置的光电转换效率不同;二是由于光斑在探测器有效面边缘处,因PN 节的电容效应而产生的探测器空间效应[32].使用焦距更短的透镜或透镜组进一步缩小光斑尺寸或者使用更大面积的探测窗口可以减小这种空间位置效应.
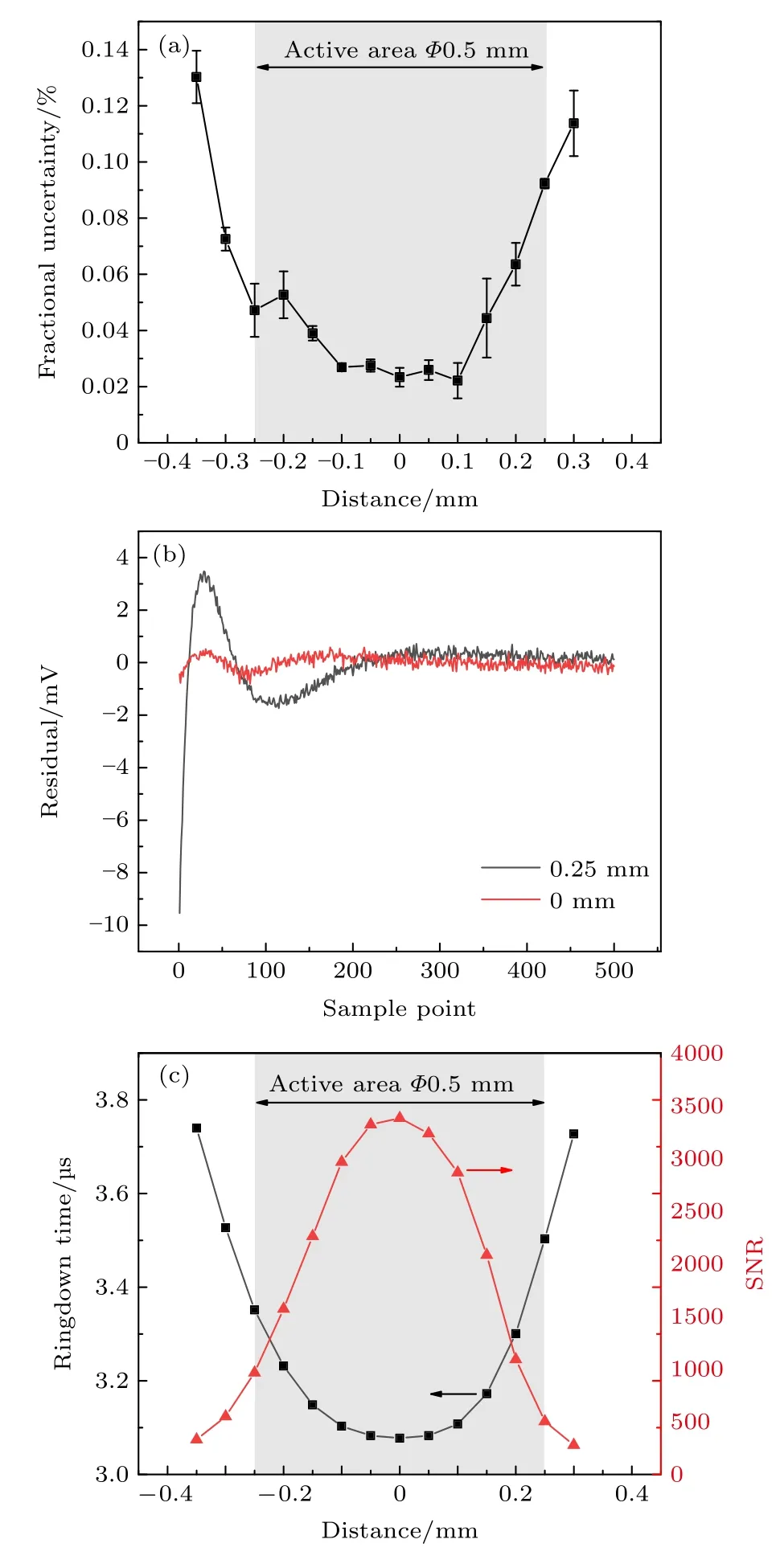
图7 透射光在探测器不同有效面位置上的实验结果(a) 空腔衰荡时间相对不确定度;(b) 不同探测器位置下的衰荡信号拟合残差;(c) 衰荡时间 (黑色曲线) 及衰荡信号拟合信噪比 (红色曲线).Fig.7.Experimental results of transmitted light at different positions of detector’s effective surface.(a) Fractional uncertainty of cavity ring-down time (black line);(b) ringdown signal fitting residuals at different detector positions;(c) ring-down time and signal-to-noise ratio of ring-down signal fitting (red line) as a function of the distance between the light and the detector center.
然而,增大探测窗口面积会同时增大探测器的结电容,从而降低探测器带宽.而CRDS 信号是一个快速变化的信号,对探测器带宽要求较高.因此,在CRDS 中对探测器的选择,需要同时兼顾探测面积和带宽.
3.4 腔衰荡信号触发阈值
实验中,测量了不同触发阈值下,空腔衰荡信号的相对不确定度,结果如图8 中所示,误差条表示相对不确定度的起伏,横坐标为腔模幅度归一化的阈值电压.尽管实验结果显示在不同阈值下,获取的衰荡时间变化很小,变化范围仅为0.02%,但是阈值越大,相对不确定度越好.当阈值低于0.65时,相对不确定度较差.这是因为在低阈值下,腔衰荡信号幅度较小,信号的信噪比小于2200,容易受到电子噪声的影响.而当阈值大于0.65,衰荡信号信噪比优于2200,相对不确定度始终保持在0.05%以下,并且起伏很小,此时腔衰荡信号更加稳定.在CRDS 中,有两个主要因素会造成腔透射模幅度起伏:一是由于扫描激光电流引起的激光功率的起伏;二是由于腔内气体吸收造成的腔内光功率降低.这导致衰荡阈值无法设置很高,而将归一化阈值设置为0.65,保证信噪比大于2200,是同时兼顾测量量程和准确性的最佳值.同时该结果也表明,在CRDS 的设计中,并不需要一味地寻找超高反射率的腔镜或者吸收线强的跃迁线.根据测量浓度量程,选取适当的光学腔腔参数,将透射腔模幅度控制在0.65 以上,保证信噪比大于2200,会获得更佳的测量不确定度.
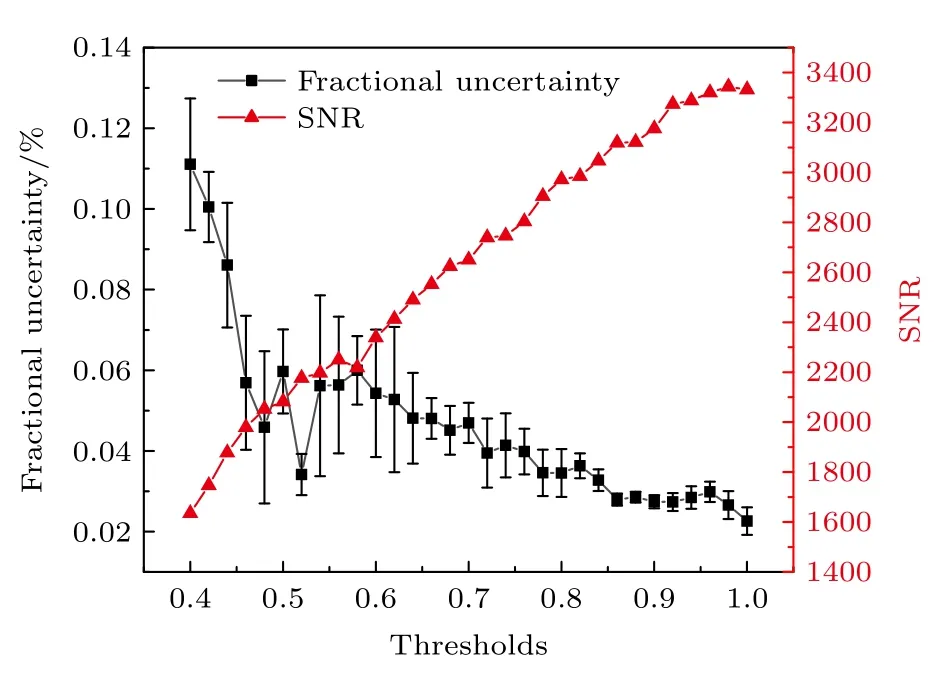
图8 不同衰荡信号触发阈值条件下的空腔衰荡时间相对不确定度和衰荡信号拟合信噪比Fig.8.Fractional uncertainty of cavity ring-down time and signal-to-noise ratio (SNR) under different trigger thresholds of ring-down signals.
3.5 探测灵敏度与大气甲烷浓度测量
利用以上分析结果,优化了实验系统,选择低反馈率(3%FSR)、高触发阈值(90%腔模幅度)以及汇聚光斑在探测器中心位置处,得到了高稳定性的光学反馈线性腔衰荡光谱系统.实验中,对同一个腔纵模进行了连续测量,获取一组空腔衰荡率(1/(c·τ0) ,其中c为光速,τ0为空腔衰荡时间),如图9(a)所示,其中,采样时间为3300 s,采样率为3 Hz.空腔衰荡时间的相对不确定度达到了0.026%.对数据进行Allan 方差分析[33],结果如图9(b)红线所示.图中黑色虚线表示系统的白噪声响应,值为1.6×10–9cm–1·Hz–1/2.在积分时间为180 s 时,获得系统的检测限为1.3×10–10cm–1,对应甲烷吸收线 (6046.9 cm–1) 的体积浓度检测限为0.35×10–9,满足了对温室气体检测的要求.造成系统中长期漂移的因素主要包括两个:一是由于腔长会随着环境温度改变而改变,导致腔纵模频率发生变化;二是由于光学器件端面干涉效应(etalon 效应)随温度发生长期变化,该etalon 效应会在衰荡时间中引入不确定度.对整个光学系统进行温度控制,可以进一步提升系统的长期稳定性,从而获得更好的探测灵敏度.
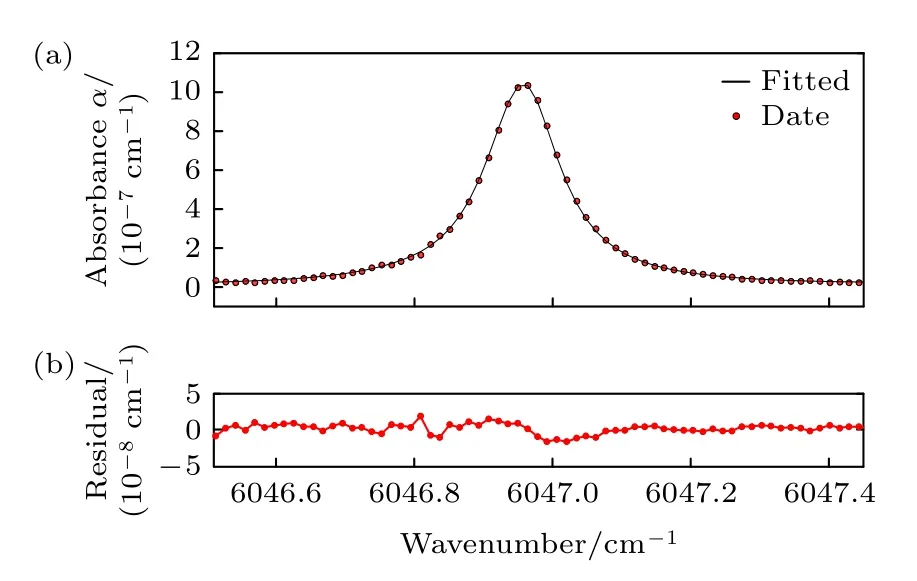
图9 空腔衰荡时间的长期测量(a)和Allan 方差分析(b),黑色点线为白噪声响应曲线,红色曲线为Allan 方差Fig.9.Long-term measurement of cavity ring-down time(a) and Allan variance analysis (b).The black dotted line is the white noise response curve,and the red curve is the Allan variance.
最后,利用该系统对实验室内大气中的甲烷进行了浓度测量.气体首先经过无水氯化钙进行除水处理,然后进入衰荡腔后,维持腔内气压在本地大气压水平(0.92 atm (1 atm=1.01325×105Pa)).通过测量在6046.9 cm–1甲烷吸收线[34]附近的67 个连续腔模(频率扫描范围约为25 GHz)获得CH4吸收谱,计算得到的吸收系数如图10(a)中红点所示.图10(a)中黑线为基于洛伦兹线型对光谱信号进行拟合的结果,拟合残差在图10(b)中显示.拟合得到大气甲烷体积浓度为2.7×10–6,拟合信噪比约为160,拟合残差中的结构噪声主要来源于etalon 效应.
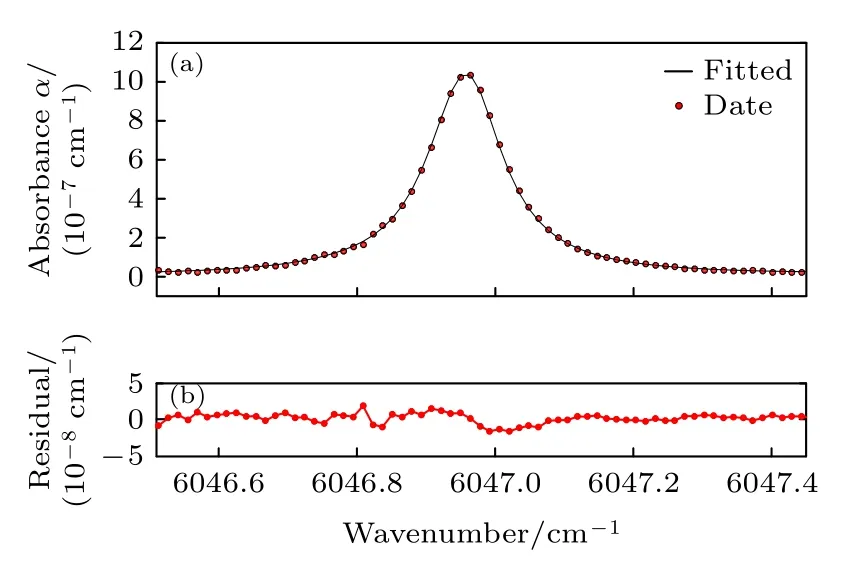
图10 (a)大气甲烷吸收测量以及拟合结果;(b)拟合残差Fig.10.(a) Atmospheric methane absorption measurement and fitting results;(b) fitting residual.
4 结论
我们发展了一种光学反馈线性腔衰荡光谱技术,解释了在线性腔光反馈系统中,腔前镜的直接反射光与腔内泄漏光对激光器光反馈的不同作用,从相位角度解释了在反馈相位一定的条件下、腔前镜直接反射光不参与频率锁定的原因.利用光学反馈的线宽压窄作用,在精细度仅为7800 的FP 腔上获得了31%的耦合效率.重点分析了光学反馈率、衰荡信号触发阈值、探测器相对透射汇聚光斑位置这3 个变量对系统不确定性的影响.实验结果表明,通过设置低反馈率(3% 自由光谱区间)、高衰荡信号触发阈值(65% 腔模幅度)以及将透射光斑聚焦到探测器有效面中心等措施可获得较好的测量不确定度.最后以空气中的甲烷为例,对其浓度进行了测量,Allan 方差分析得到的最小可探测吸收体积浓度达到0.35×10–9.由于实验中所用的衰荡腔没有进行主动温度控制,环境温度的波动降低了系统的不确定性.增加主动温度控制,有望进一步增加系统稳定性、获得更高的探测灵敏度.下一步的工作将在主动温度控制的基础上,结合中红外量子级联激光器以及更高精细度的FP 腔,发展高灵敏中红外光学反馈线性腔衰荡光谱技术.
