10KV真空高压断路器的运行特性及操作机构的动作特点
2022-07-18马晟赵小平马小荣
马晟,赵小平,马小荣
(神木职业技术学院,陕西神木,719300)
0 前言
目前所使用的真空开关主要是以一种极为稀少的气体分析和有着较高绝缘强度的真空空间作为熄弧介质的新型开关。在密封真空的灭弧室内分合电路和切断电源时,其触头仅有金属蒸汽离子所形成的电弧,且没有任何气体发生碰撞和游离。因为金属蒸汽离子有着十分快速的扩散和复合过程,进而可以快速实现灭弧操作,以此恢复原有的真空度,能够承受住多次的分、合闸动作,而不会降低其开断的能力,且不会产生高压气体和有毒气体。因此基于其多种优势的组合,在现有的城市供电所中真空高压断路器的使用十分常见。
1 10kV高压真空开关基本运维需求
1.1 定检
真空开关结合其用途和结构可以分为两种形式,分别为真空断路器和接触器。其中真空短路其本身经常存在真空泡慢性的漏气和绝缘件击穿等缺陷,并且目前还不能实现开关运行期间的在线监测作业,因此实施开关的定检动作十分必要[1]。一般对于真空开关的定检作业需要结合表1内部执行,并且对所检测的数据进行详细记录。如果遭遇特殊天气或者是设备新投运的情况,则需要以特殊检查的方式保障开关运行的可靠性。

表1 真空开关的定检标准
1.2 巡视
在开关操作过程中,需要对其进行巡视操作,以便于发现异常的情况,减少故障发生概率。
(1)在进行分闸操作时当真空开关断开以后,需要对电缆头进行巡视,观察其装置的带电显示设备是否正常[2]。
(2)在对母线的侧刀闸拉开时需要对刀口进行巡视,观察其是否存在火花或者是真空泡是否存在闪光等问题。
1.3 维护
对于刚投产不久并且有着较多次数的拒动开关而言,一般需要在一段时间之后全面维护一次整体的操作机构,如对开关分合闸期间线圈动作电压进行重新测量等操作,保障真空开关运行的安全与可靠性[3]。
2 高压断路器电机操纵机构特征与设计特点
2.1 高压断路器与电机操动机构的运动特征
基于高压断路器的无刷直流电机操动机构驱动系统的基本原理如图1所示。

图1 高压断路器的无刷直流电机操动机构驱动系统的基本原理图示
其中左侧为分闸状态;中间为刚合状态;右侧为合闸状态。在合闸期间,驱动电机的主轴a以旋转方式的角度θ推动拐臂ab绕a点以逆时针的方向进行转动,连杆bc在拐臂ab的作用下,以直线移动并且旋转的方式进行运动,这时的绝缘拉杆cde在连杆bc的作用下以直线方式进行移动,其位移可被表示为dy,动触头ef在绝缘拉杆cd的作用下以直线方式运动,其位移为S[4]。此时当S=S0时,真空灭弧室和动、静触头闭合,这时的真空卡关正好处于刚和的位置。随后驱动电机的主轴a继续转角θ,此时由于动、静触头和真空灭弧室均已闭合,触头弹簧组件de上的弹簧开始压缩,这时当θ=θ0时,驱动电机的主轴a转动结束,这时的真空开关则处于合闸的状态,触头弹簧的组件de上的弹簧压缩量为C,也就是接触的行程。同样分闸的过程正好与其相反,该传统系统的形式也是由转欧东变为直动。这时考虑到真空灭弧室在刚合闸时会由于灭弧室触头压缩弹簧的作用造成反力突然增加的问题,这样利用连杆的死点能够有效减少反力的作用,且也可降低合闸的保持力。
2.2 高压断路器与电机操动机构的驱动反力特征
在电机操动机构运行期间,其各个部件的质量全部要归结到f位置的等效质量Mf上,结合能量守恒原理,可以得到机构操作力和触头速度特征之间的动态关系:

在运动期间机构出力F和断路器侧负载的反力Fz都是变量,因此公式(1)可以被改为:

当初始速度v0=0时,行程s位置的触头速度v和机构的受力关系为:

此时系统的运动方程为:

其中iF为结构的操作力;Fj为真空断路器的反力;Ml为各轴销位置的摩擦力矩。而由于轴销位置的摩擦力矩相比于操作力和断路器反力来讲相对较小,并且动触杆行程的复杂函数,因此在工程上一般不对各个轴销位置的摩擦损耗进行计算,而是利用连杆机构的效率来对该损耗对于整个运动系统影响进行表示,因此公式(4)则可以改写为:

其中η表示为运动系统的机械效率。并且考虑到触头速度曲线情况下的机构所需要的出力曲线如图2,图3所示。
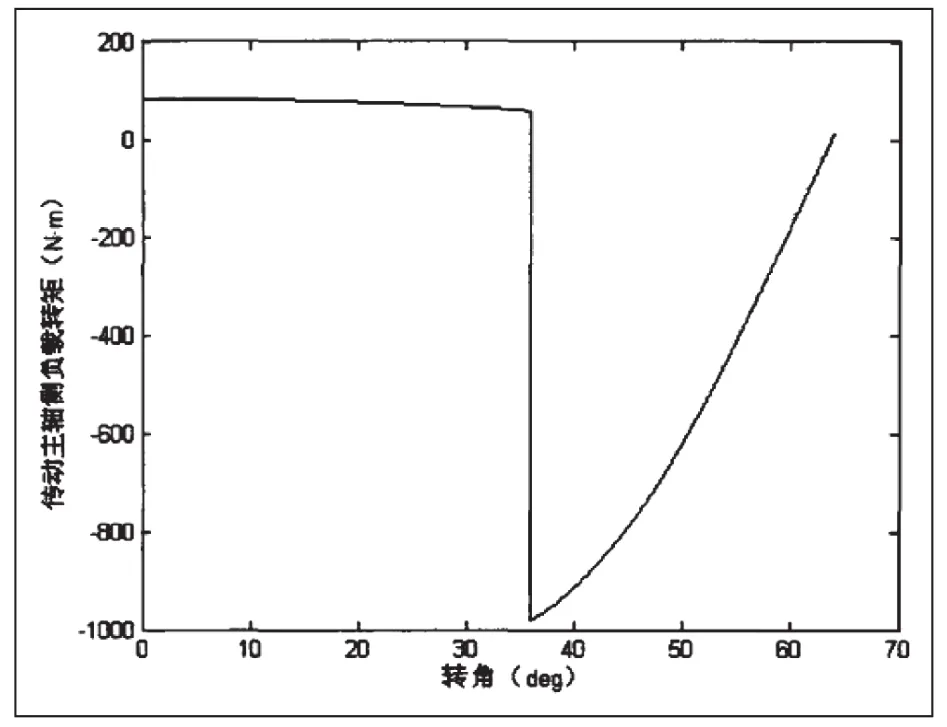
图2 合闸过程

图3 分闸过程
而在分闸的初始阶段,分闸力做的是正功,其能够提供一部分分闸的能量,加上触头的弹簧可以提供一定的能量,保障触头的速度能够迅速提升,满足其刚分速度的实际要求[5]。在分闸时机构出力为负值,触头所做的为减速运动,分闸力做负功,进而减少在分闸结束期间对于机构的冲击力,充当整个传统机构的减速装置,这也是电机操动机构的特征。
2.3 高压断路器电机操动结构结构设计的特点
电机操动机构的本体主要是由驱动电机(定子与转子)、转子限位保持装置和增量式的光电编码器所组成,为了保持驱动电机的合闸位置,机构需要设置分合闸限位保持装置。其中的增量式光电编码器其可提供机构转速和转角的测量功能。
3 高压断路器驱动电机的控制方法研究
3.1 无位置传感器控制技术研究与分析
一般所使用的无刷电机都是利用位置传感器来定位转子的位置,但是由于该传感器的存在,也增加了电机本身的尺寸和外围硬件电路的复杂程度,由此也减少了系统的抗干扰能力和可靠性[6]。我国近些年为了解决该项问题,逐渐就开始对无位置传感器直流电机的控制策略进行研究。无位置传感器其本身有着性能稳定、成本较低的反电动势检测法支撑,因此在相关领域中已经得到广泛的应用。
另外断路器驱动电机采取的是两相导通型三相六状态工作运行方式,在同一时刻由两相绕组导通,每一想导通60°,且每相隔30°换相一次,其顺序为A/B-A/C-B/C-B/A-C/A-C/B,将驱动电机的初始位置进行调整,促使电机刚启动期间的位置为刚换相的位置。而由三相无刷直流电机数学可以明确:
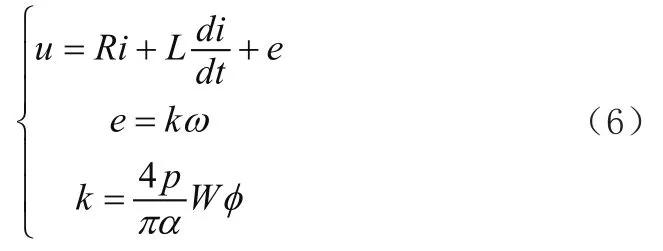
其中ω表示转子的角速度,p表示电机的极对数,α表示极弧系数,k为换相系数,W表示每一相绕组串联的匝数,φ表示每一极的磁通量。
在真空电路其电机操纵机构分、合闸期间,电机的绕组端电压u和绕组等效电阻R与等效电感L均为已知量,结合数字信号处理器(DSP)检测出不同时刻的绕组电流值,结合上述公式能够得到反电动势e,我们假设此时的换相系数k为已知,进而可以得到转子的角速度ω。对于转子的角速度ω积分可以得到转角θ,随后根据转子转角所实现的驱动电机换相的操作判断得到其实际的转角数值。所以当k已知时,可以结合绕组的电路之来对转子的角度进行确定,以此来实现换相操作[7]。且在断路器分合闸操作期间,驱动电机正在起动阶段运行,内部磁场还没有建立稳定,由此在其电机的操作阶段换相系数k则为变量。随后由电机动力学方程可以了解到:

本公式中Te与TL(θ)分别表示电磁与负载的转矩,单位为N·m;而J(θ)则表示转子及负载的总转动惯量,单位为kg·m2;θ为转子的转角,单位为rad。结合上述两个公式的联合可以得出:

电机操动机构驱动电机转子和负载的总转动惯量J(θ)和负载的转矩TL(θ)是关于转角θ的函数,也就是在断路器分、合闸的过程中当转角为θ时,其所对应的转动惯量J(θ)和负载的转矩TL是固定的,并且由公式(8)可以明确的是,该转角下的系数k值和绕组电路i与转角θ有关,也就是换相系数 k=f(θ,i)。结合相关实验可以得到系数k的关系式,也就是可以根据对绕组电流值的采集来计算转子的角度,再去结合转子角度的大小来实现电机的换相操作。
4 结语
本文基于10kV真空断路器和其操作机构的运行特征与控制措施的详细分析,具体研究其电机操作机构的运行特点,最后以微分、积分和比例实现系统的状态控制,减少机构反应出现的误差,保障断路器的反应可靠性与高速性,减少供电系统的故障,以为城市提供更加高质量的供电服务。