基于无人机的海上搜救识别系统设计
2022-07-16王睿麟
王睿麟
(烟台大学,山东 烟台 264003)
0 引言
如今,海洋经济发展迅速,从事海洋产业的人员越来越多。由于海洋气候条件较为复杂,很容易受到寒潮、大雾、台风等环境的影响,并出现船只搁浅、碰撞、触礁等事故,造成人员伤亡与财产损失[1]。为了减少海上船只的事故,海上搜救系统应运而生。传统海上搜救系统侧重于搜救,通过救援队的望远镜或红外识别装置,对人员进行搜救,但是,红外识别装置经常会识别到海洋中的生物,影响人员救援时间[2]。除此之外,识别装置仅可以识别人员,缺乏对于其他物资的识别能力,无法有效保证生命财产安全。
无人机是一种通过旋翼马达与控制主板控制的设备,在无人机上安装摄像头后,可以通过人工控制或系统控制,对无人机所到之处的图像进行拍摄[3]。为了对出现事故的船只进行精准定位,通过船只的自动识别装置,将船只的失事信息传递给搜救系统,提高海上搜救效果,本文利用无人机,设计了海上搜救识别系统,旨在提高图像识别效果,为海上搜救提供便捷条件。
1 硬件设计
无人机需要具有一定的机械强度,保证无人机在海上可以平稳飞行。为了保证无人机的机械强度,无人机需要具有适当的负载能力,因此,将海上搜救的无人机机身重量设定为2.5 kg,电机型号选用YEJZF160,机架为500 mm的碳纤维材质,并使用6 200 mA/h的超大续航电池,保证海上搜救的高效性[4]。
1.1 图像传感器
本文设计了图像传感器的硬件,考虑到图像传感器是在系统中起到图像采集功能的硬件,因此,将图像传感器的重量设计成201g,尺寸为150.42 mm×32.68 mm×32.68 mm。为了保证图像传输质量,将传感器的传输帧率设置为120FPS,使图像分辨率在760 px×500 px,最大限度地保证图像识别效果。此外,海上搜救时间较长,不能进行短时间的材料补充,因此,将图像传感器的工作电压设置为3.0 V,每小时消耗的能量仅为2.76 W,保证图像传感器的续航能力。将图像传感器的CPU设置为256 GB,可以支持图像的加速传输,为海上搜救行动提供时间保障。
1.2 飞行控制器
飞行控制器选用Pixhawk型号进行无人机的飞行控制。此型号的飞行控制器由PXJVGH与PX8GIBG两个部分组成,其中PXJVGH为系统主控环节,可以通过系统对图像传感器传回的图像进行识别,随后控制无人机向定位方向飞行[5]。PX8GIBG是系统的辅助控制环节,由于海上搜救环境较为复杂,遇上雷雨天气,直接影响无人机的图像识别效果与控制效果,如果出现无人机失控的现象,可以通过PX8GIBG进行召回,保证无人机的安全使用。因此,PX8GIBG中存在较多的STLHJG124信号,可以对无人机传达相关姿态指令,通过PWM的系统控制与强制控制两个环节,可以保证无人机的正常使用。除此之外,飞行控制器可以将图像传感器中的图像进行初步分析与处理,并通过nRFL12HGD与系统进行无线通信,将无人机当前飞行图像与无人机的飞行轨迹传输回系统,最大限度地保证系统识别效果,为海上搜救的下一步行动提供条件。
2 软件设计
2.1 识别海上搜救环境
海上搜救环境较为复杂,普通的救援方式费时费力,影响海上救援效果。海洋环境特有的高盐、高湿、强风,以及复杂海况,再加上特殊天气对通信网络限制等问题,使海上救援成为难题[6]。由于无人机小巧、轻便的特点,可以适应各种气象条件,因此,无人机可以广泛应用于搜救行动。基于此,本文利用无人机设计海上搜救系统。由于海上环境较为恶劣,会出现较多的风雨交加的场景,影响船只的行进与无人机的使用。因此,本文将无人机进行改造,使其可以在风雨环境下平稳地运行。在保证系统的硬件正常使用的条件下,本文对海上搜救环境进行识别。在海滩溺水急救的过程中,系统需要对溺水人员的位置进行精准定位,并利用无人机携带小型救生圈,为溺水人员提供自救条件,为搜救人员争取更多的救援时间。
2.2 利用无人机进行距离测算
在海上搜救过程中,搜救时间至关重要。系统在识别出海上救援环境后,利用图像传感器将图像传输回系统,以便提取海上搜救特征,精准定位搜救位置。在此过程中,考虑到图像识别效果,将图像传感器的分辨率设计成760 px×500 px,可以提高图像传输精度,便于系统对图像所在区域的特征进行提取。在确定施救区域后,本文利用无人机技术进行距离测算,测算公式如下:
(1)
式(1)中,Zc为施救区域与搜救人员的距离;k0为施救区域的视距;s1为搜救人员所在位置的视距;d为施救区域与搜救人员直射路径的矢量和。在测算出施救区域与搜救区域的距离后,搜救人员可以对无人机进行遥控作业,对于触礁导致的人员溺水事故,可以利用无人机将救生圈等小型救援物资送到施救区域中,使待救人员可以先进行自救,最大限度地保证人身安全[7]。
2.3 实现海上搜救的精准识别
为了实现海上搜救的精准识别,系统可以对海上搜救的影响因素进行分析,并使用无人机开展海上救援。一般情况下,在离岸较远的海上开展搜救时,无人机使用时间较长、抗风性能好,系统可以将无人机与海上搜救系统相融合,使其可以实现海上搜救的协同作业[8]。本文设计的海上搜救系统具有人机交互、协作,以及视觉识别等功能,通过图像传感器将视觉信息进行传输,使无人机可以准确地定位施救位置。通过系统与无人机的交互与协作,便于搜救人员在海上实现快速调动、快速救援的目标。海上搜救的具体流程如图1所示。

图1 海上搜救流程
如图1所示,系统对图像传感器中的图像进行接收;将图像进行识别与处理;提取出图像中施救区域的特征,并对施救区域进行精准定位,从而实现海上救援。在此过程中,识别时间至关重要,只有缩短图像识别时间,才能为后续救援提供保障。
3 系统测试
由于海上搜救实验具有较多的影响因素,没有专业的搜救人员很难完成,因此笔者在空旷的实验室以100:1的比例,模拟出一个海上环境,每隔10 cm放置一艘待搜救的渔船,最大限度地还原海上救援环境。在此环境下,使用本文设计的系统进行海上搜救与识别,并将传统海上搜救系统与本文设计的海上搜救系统进行对比,验证两者搜救与识别效果,具体测试过程及结果如下。
3.1 测试过程
一般情况下,海上搜救需要对多个目标进行搜救,侧向精度需要在10°以内,才能满足海上搜救需求。为了保证本文设计的系统可以正常运行,对系统的硬件进行调试。首先,对无人机进行路径规划,安排搜救人员处于固定位置,使无人机按照规划的路径飞行,并保持飞行高度不低于2 m,飞行速度为20 cm/s,保证无人机可以正常使用。
将系统的图像传感器与飞行控制器的硬件进行安装,如果图像传感器传输回的图像与无人机飞行区域环境图像一致,说明图像传感器可以正常使用;如果图像不一致,说明该硬件传输图像存在延时,将其进行调整,直至两者的图像重合。
在此基础上,对飞行控制器进行调试,飞行控制器需要进行两方面的调试,一方面,调试PXJVGH部分,只要无人机可以正常飞行,即保证PXJVGH部分正常;另一方面,调试PX8GIBG部分,模拟出海上风雨环境,对无人机进行冲击,当PXJVGH不能控制无人机时,使用PX8GIBG进行强制召回,如果可以召回,则表示PX8GIBG部分可以正常使用,如果不可以召回,则表示PX8GIBG部分不能正常使用,需要继续调试。在PXJVGH与PX8GIBG部分均调试完成后,即可保证系统的硬件可以正常使用。最后,本文对系统的软件进行调试,软件调试成功会出现如图2的登录界面,如果未出现登录界面,则需要继续调试。

图2 系统登录界面
系统在硬件与软件调试完成后,操作人员需要输入自己的用户名与密码,保证系统数据的保密性。当输入用户名与密码完成后,可以点击图像识别模块、距离测算模块、提取特征模块,以及二次识别模块中的任意模块,保证系统可以精准识别海上需要搜救的人员或物资。
3.2 测试结果
在上述测试环境下,将传统海上搜救系统与本文设计的海上搜救系统进行对比,验证两者的搜救识别效果,测试结果如表1所示。
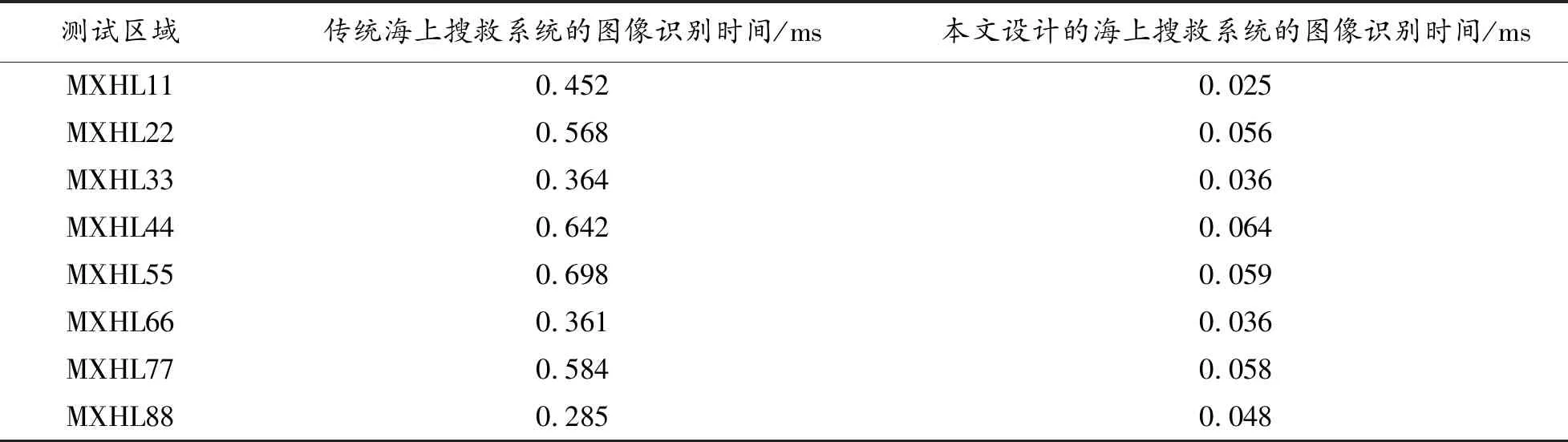
表1 测试结果
如表1所示,为了区别测试区域,本文将测试区域进行编号,分别为MXHL11-88。在相同的测试条件下,传统海上搜救系统的识别时间较长,最长的图像识别时间在MXHL55区域,为0.698 ms;最短的图像识别时间在MXHL88区域,为0.285 ms,无法保证海上搜救效果,影响实际救援时间。而本文设计的海上搜救系统的图像识别时间较短,最长的图像识别时间在MXHL44区域,仅为0.064 ms;最短的图像识别时间在MXHL11区域,仅为0.025 ms,可以保证海上搜救效果,为救援提供最快的时间保障,符合本文研究目的。
4 结语
近年来,海上运输事业蓬勃发展,海上船只增加,形成海上运输产业链,为我国的经济发展提供了条件。但是,由于海上环境较为复杂,经常出现风雨交加的环境,海流变得更加湍急,人们在船只上的生命安全与财产安全受到了严重的威胁。除此之外,海上运输链的形成,经常出现海上船只拥堵的现象,造成海上触礁、搁浅、碰撞等灾害频发,造成重大的人身伤亡与财产损失。为了保证海上出行人员的安全,海上搜救系统的设计势在必行。传统海上搜救系统图像识别效果较差,识别时间较长,影响人员的实际搜救效果。本文摒弃传统系统的缺点,利用无人机设计海上搜救系统,旨在提高图像识别效果,为海上搜救提供便捷条件。
