分布式电动汽车横摆力矩控制研究
2022-07-16卢丽霞
卢丽霞,李 刚
分布式电动汽车横摆力矩控制研究
卢丽霞,李 刚
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
针对分布式电动汽车操纵稳定性问题,提出了基于模糊PID控制的横摆力矩控制策略。基于2自由度车辆模型计算出期望横摆角速度并与实际值作差,采用模糊PID控制设计横摆力矩控制器计算出跟踪期望车辆状态响应参数所需的附加横摆力矩,通过转矩分配控制器对各驱动轮进行力矩再分配。最后通过CarSim/Simulink联合仿真平台和驾驶模拟器硬件在环实验平台进行蛇形和双移线工况仿真实验。结果表明:以横摆角速度为控制目标的模糊PID控制算法能够提高车辆的操纵稳定性,验证了该控制算法的可行性和较好的实时性。
分布式电动汽车;模糊PID;横摆力矩控制;联合仿真
近年来对车辆主动安全领域的研究中,直接横摆力矩控制受到了很大的关注。车辆稳定性控制系统[1-2]是能够通过车辆执行机构在行驶过程中调整车辆的车身姿态,从而提高在不同工况下车辆行驶的稳定性。直接横摆力矩控制是一种主动安全控制技术[3],尤其适用于极限工况。主要由轮胎纵向力产生的横摆力矩来稳定车辆行驶时的运动状态以防止车辆失稳,与转向控制系统一起组成车辆的电子稳定控制系统[4-7]。文献[8]开发了一系列自上而下的稳定性分层控制策略以提高车辆转弯时的稳定性。搭建了基于模糊PID控制的横摆力矩控制器和驱动力矩分配器。文献[9]通过模糊控制跟踪目标运动状态,将横摆角速度和质心侧偏角设为控制目标,利用参考模型计算出车辆当前状态下所需的横摆力矩。文献[10]由于其理想的转向特性,以二自由度前轮转向模型作为参考模型,充分发挥阿克曼四轮独立转向的优势,制定出4WIS前馈与模糊反馈、4WIS前馈与模糊PID反馈的控制策略,从而达到四轮驱动车辆稳定的目的。
本文以分布式电动汽车为研究对象,基于模糊PID控制算法设计出横摆力矩控制器,将横摆角速度作为输入变化量经过控制器决策出附加横摆力矩以满足车辆的需求,基于规则分配设计的驱动力分配控制器重新分配目标驱动力矩和附加横摆力矩。最后,应用CarSim/Simulink联合仿真平台和驾驶模拟器仿真实验平台对本文所提出的控制策略进行验证,并对结果进行对比分析。
1 模型搭建
1.1 参考模型
虽然线性二自由度车辆模型简单,但是却以最少的变量反映了汽车行驶时的最本质特征。因此,本文将线性二自由度车辆模型作为参考模型,如图1所示。

图1 线性二自由度车辆参考模型
根据受力分析与车辆运动关系分析,得到线性二自由度汽车运动的微分方程,如式(1)、(2)所示。


式(1)、(2)中:是车辆质量;1、2是前、后轴的侧偏刚度;δ、δ是前轮、后轮转角;I是车辆的转动惯量;、是前、后轴至质心的距离;是侧向速度;是纵向速度;w是横摆角速度;是质心侧偏角。
上述式子中,若后轮转角δ为0,那么就变成传统的前轮转向车辆的线性2自由度模型。通过式(1)和式(2)可知,表征车辆稳定性的参数是关于w、δ、的方程组,其中速度与前轮转角δ都由驾驶员控制输入,而质心侧偏角在实际车辆控制中获取较困难,因此,确定本文的控制参考量为横摆角速度的稳态响应,而稳态下的响应为定值,即式子中的微分量均为零,由此求得横摆角速度w如式(3)所示。
式中:为稳定性系数,由式(4)确定。

式中:为轮距;C为后轮侧偏刚度;C为前轮侧偏刚度。
同时车辆行驶过程受到路面附着情况的限制,横摆角速度的临界值w设定如式(5)所示。

式中:为路面附着系数。
1.2 驱动模型
四个轮毂电机的输出转矩大小会对车辆的行驶稳定性有很大的影响,因此需要通过对轮毂电机输出转矩的大小进行更为合理地控制。本文主要是通过直接横摆控制的方式,使其能够产生保持车辆具有良好行驶状态所需的附加横摆力矩,从而可以在一定程度上改善车辆的行驶稳定性,避免危险情况的发生。由于CarSim软件中并没有电动车的模型。因此,需要利用Matlab/Simulink软件完成电机模型的建立。基于PI原理构建了能够很好地反映电机转矩特性的电机模型,轮毂电机控制原理如图2所示。

图2 电机控制原理图
图2中,是电流转矩系数,是电流,是控制电压,Δ是反电动势,是磁通量,V是车轮转速。其控制原理为:4个轮毂电机模型的输入均为车辆正常行驶需要的目标驱动力矩和相应车轮的转速,经过PI控制器的有效调节,最后输出每个电机的实际驱动力矩,通过在CarSim中设置的端口将实际的驱动力矩给到相应的车轮。
2 控制系统结构
首先,监测车辆的实际运行情况[11],其次,通过控制算法能够得到车辆当前运动状态所需的附加横摆力矩,然后将得到的附加横摆力矩转化为纵向力并重新分配到各个车轮上,最终在极限工况下达到防止车辆失稳的目的。
本文制定的直接横摆力矩控制为分层控制结构,主要分为四部分:信号处理层、决策控制层、控制分配层和执行层。在DYC控制中,信号处理层是通过当前车速和方向盘转角输入给参考模型来计算出期望的横摆角速度。决策控制层是将控制目标量的差值作为输入最终决策出附加横摆力矩。控制力矩分配层会根据电动汽车加速踏板采集到的驾驶员期望的目标驱动力矩和决策控制层计算出当前行驶工况下需要的附加横摆力矩,通过相应的分配规则对两轮驱动力矩进行合理重新分配,把重新分配后满足需求附加横摆力矩的驱动力矩传送给执行层,执行层的驱动电机输出相应的转矩,完成DYC控制,如图3所示。
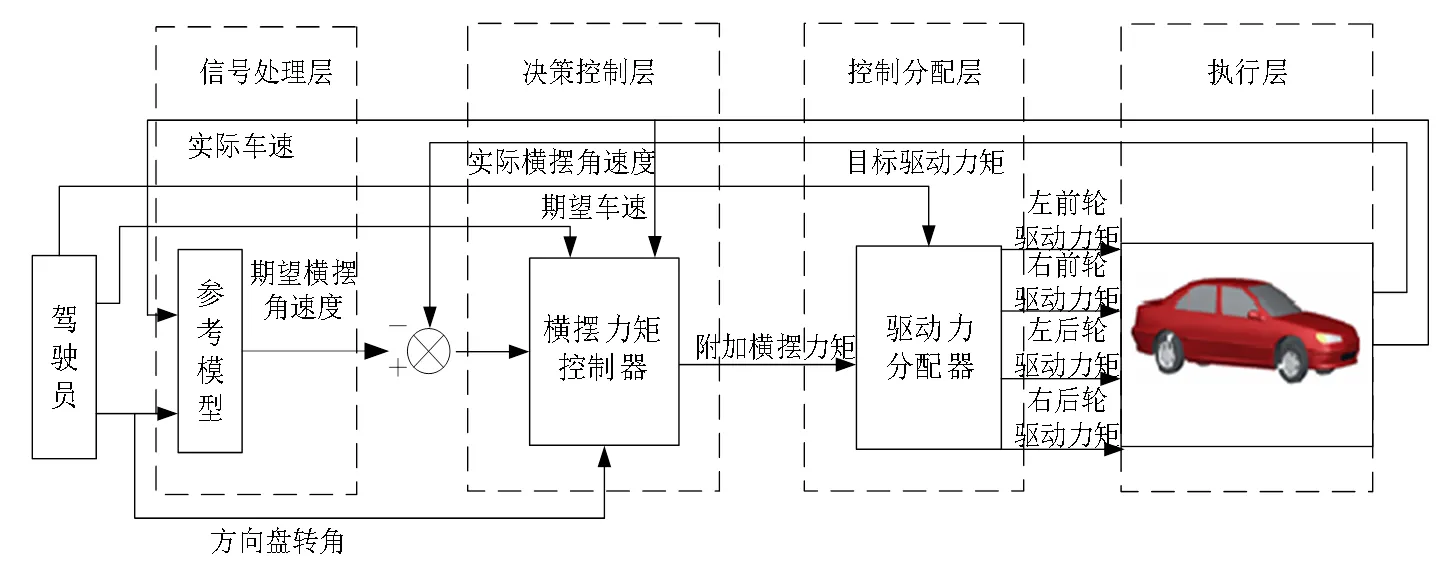
图3 横摆力矩控制系统结构
2.1 横摆力矩控制器
本文的横摆力矩控制器是采用模糊PID控制器,整车横摆力矩模糊PID控制器,如图4所示。

图4 模糊PID复合控制结构框图
模糊控制器设计步骤包括以下3个方面。
(1)模糊化:模糊控制器的输入量为横摆角速度的差值e以及变化率ec,经过量化因子作用后将输入输出的精确量转化成模糊变量。确定输出的模糊变量为修正PID控制器的3个控制参数K、K、K。输入和输出定义论域分别为[-6, 6]和[0, 1],隶属度函数图如图5~图7所示。

图5 输入量e隶属函数
(2)模糊规则的制定:将精确量变换成模糊量之后,根据以往的大量的实验和专家经验搭建出模糊规则,对实现模糊变换后的输入变量进行模糊规则推理,最终可以得到模糊化的PID控制3个修正参数,具体的模糊规则如表1所示。

图6 输入量ec隶属函数

图7 输出量隶属函数
(3)清晰化:原理是将控制器输出的模糊量转化为精确的数字量。本文选择重心法清晰化处理控制器输出的模糊量。基于前面制定的模糊规则和模糊推理,经过清晰化处理后可以得到模糊输出为相应的3个PID控制参数且一定是精确量。
2.2 驱动力分配器
驱动力分配器位于控制分配层,其作用是经过规则分配之后对车辆目标力矩和附加横摆力矩进行再次分配,并计算出各个车轮所需力矩值。
车辆的总驱动力矩如式(6)所示。
表1 模糊规则
eec NBNMNSZOPSPMPB NBPB/ZO/PSPS/PS/NSPS/PS/NBPS/PS/NBPS/PS/NMPS/PS/NMPB/ZO/PS NMPB/ZO/PSPS/PS/NSPM/PM/NBPS/PS/NMPS/PS/NSPS/PS/NSPB/ZO/ZO NSPB/ZO/PSPM/PS/NSPS/PS/NMPS/PS/NMPS/PS/NSPS/PS/NSPB/ZO/ZO ZOPB/ZO/ZOPB/PB/NSPB/PB/NSPS/PS/NSPB/PB/NSPS/PS/NSPB/ZO/ZO PSPB/ZO/ZOPS/PS/ZOPS/PS/ZOPS/PS/ZOPS/PS/ZOPM/PS/ZOPB/ZO/ZO PMPB/ZO/ZOPS/PS/NSPS/PS/PSPS/PS/PSPS/PS/PSPM/PS/PSPB/ZO/PB PBPB/ZO/PBPS/PS/PMPS/PS/PMPS/PS/PMPS/PS/PSPS/PS/PSPB/ZO/PB

式中:total为总驱动力矩,为车轮滚动半径,F、F、F、F分别表示左前、右前、左后、右后4个车轮的纵向力。
车辆直线行驶时,横摆力矩为零,4个车轮的驱动力相等。车辆转弯时,假设每个车轮分担的附加横摆力矩值相等,此时车轮上不均匀的纵向受力引起的附加横摆力矩,如式(7)所示。

式中:为轮距。
通过附加横摆力矩的正负可以对车辆当前状态进行判断分析。
当附加横摆力矩M>0时,车辆主要有两种转向运动状态,一种为左转转向不足,另一种为右转转向过度。此时为了车辆能够稳定行驶,需要纠正车辆的运动状态,表现为适当增加右侧车轮驱动力矩,并减小左侧车轮驱动力矩。

同理,当附加横摆力矩M<0时,车辆主要有两种转向运动状态,一种为右转转向不足,另一种为左转转向过度。此时为了车辆能够稳定行驶,需要纠正车辆的运动状态,表现为适当增加左侧车轮驱动力矩,并减小右侧车轮驱动力矩。

3 仿真验证与分析
利用CarSim/Simulink联合仿真平台进行实验,对上面制定的驱动力矩规则分配的横摆力矩控制策略的可靠性进行验证,并对输出的结果进行分析,同时也能从中看出附加横摆力矩计算的准确性。在CarSim中以B级车为基准车并在此基础上进行相应的参数修改,整车主要参数如表2所示。
表2 实车部分参数
参数名称数值 车高/mm1535 车宽/mm1695 轴距/mm1800 质心距前轴距离/mm1040 前/后轮距/mm1480 质心高度/mm540 整车质量/kg1200 簧载质量/kg1000 轮胎型号185/65 R15 主销内倾角/(°)0 主销后倾角/(°)0 轮胎外倾角/(°)0 前轮前束角/(°)0 绕Z轴转动惯量/(kg·m2)1640 前轴侧偏刚度/(N·rad-1)-31500 后轴侧偏刚度/(N·rad-1)-31000
实验选取如下2种工况:
工况1:车辆进行蛇形工况实验,其中路面附着系数为0.8,车速为60 km/h。
工况2:车辆进行双移线工况实验,其中路面附着系数为0.5,车速为80 km/h。
工况1的仿真结果如图8(a)~(e)所示。图(a)为车辆行驶时方向盘转角变化曲线,可以看出在第1 s左右开始转向;图(b)和图(c)为两组对比曲线图,包括未控制和控制后的车辆横摆角速度和质心侧偏角与期望值进行对比的曲线,虽然未控制时车辆没有完全发生失稳现象,但是有明显的甩尾趋势,可以看出与不受控制时进行对比,控制后的车辆控制参数能较好地跟踪参考模型输出的期望值;图(d)为附加横摆力矩曲线;图(e)为重新分配后的四轮力矩,与附加横摆力矩的趋势一致。结果表明:控制策略有效的提高了车辆的稳定性,避免了下一时刻的危险发生。
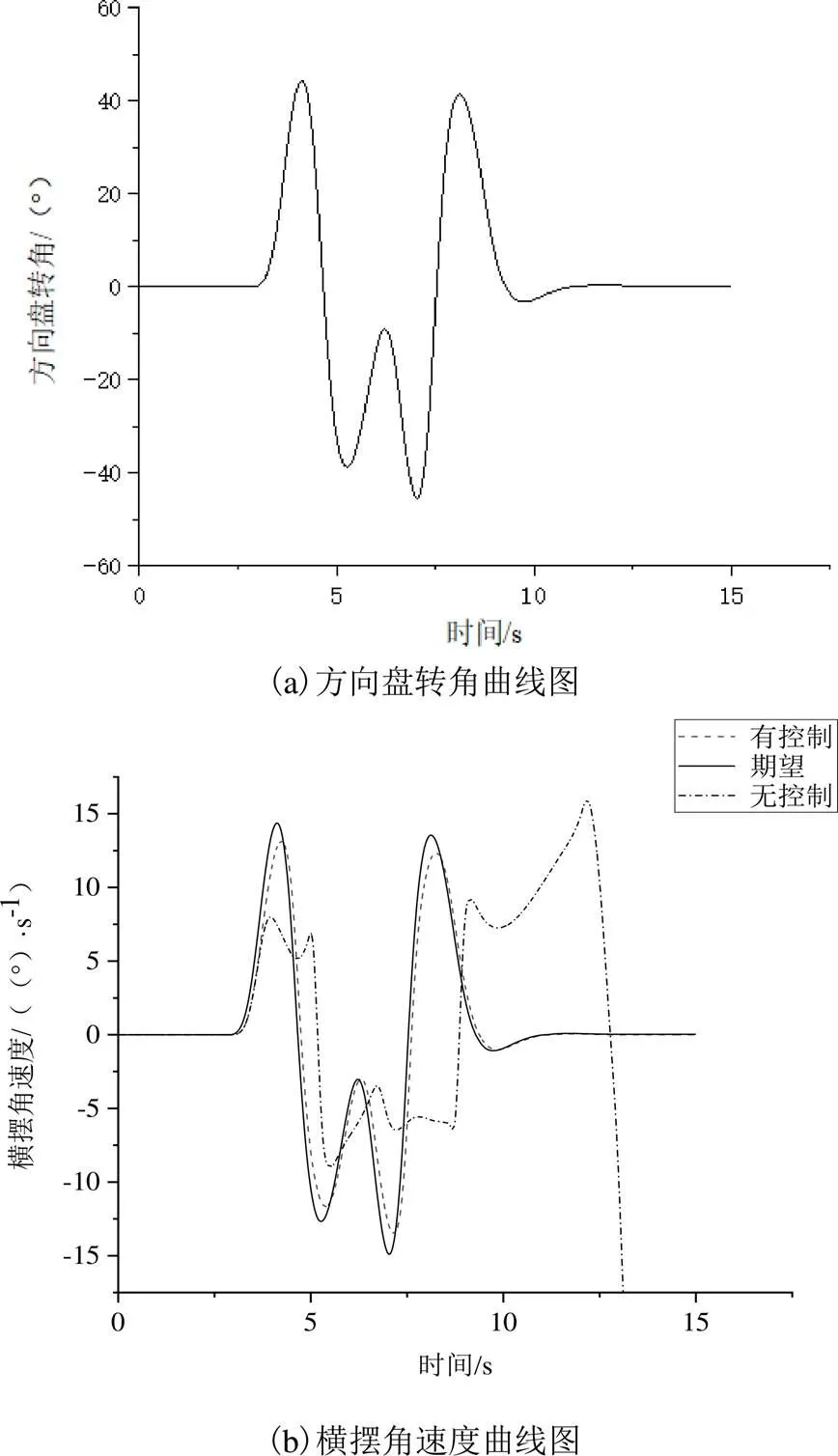
工况2的仿真结果如图9(a)~(e)所示。图(a)为车辆行驶时的方向盘转角变化曲线,可以看出在第2.5 s左右开始转向;图(b)和图(c)为两组对比曲线图,包括未控制和控制后的车辆横摆角速度和质心侧偏角与期望值进行对比的曲线,从其中可以看到未控制时的车辆横摆角速度和质心侧偏角在10 s后发生急剧变化,出现打滑现象,非常容易发生危险。控制后的车辆在横摆角速度和质心侧偏角等方面都有了非常显著的改善,并且还可以看到,有控制的车辆控制参数能够很好地跟踪参考模型输出的期望值。图(d)为附加横摆力矩曲线;图(e)为重新分配后的四轮力矩,与附加横摆力矩的趋势一致。
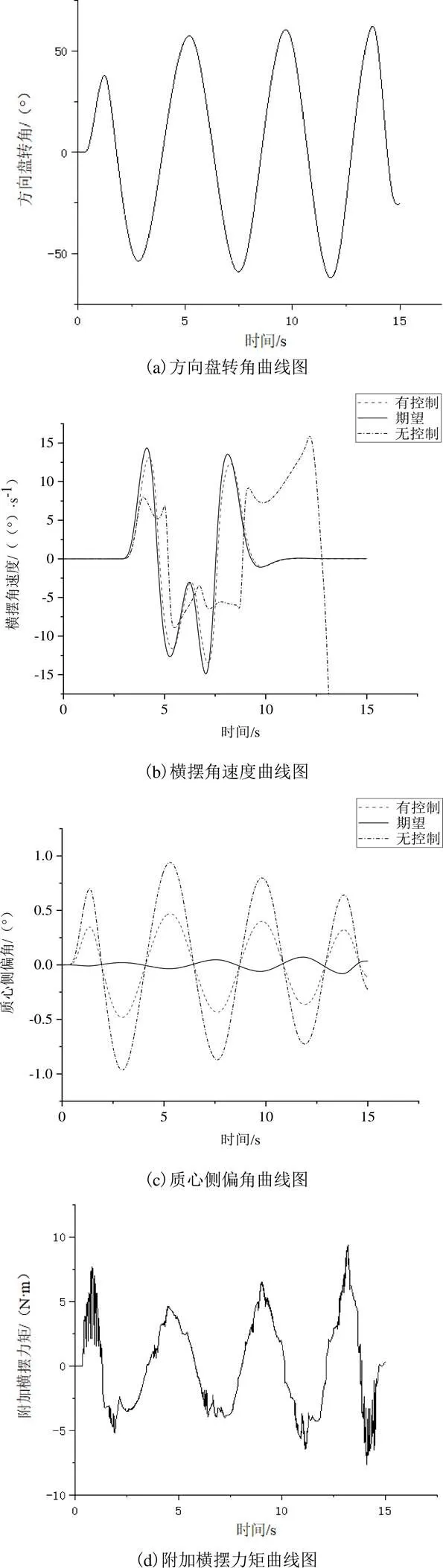
结果表明:在极限工况下,该控制策略能够显著改善车辆横摆角速度和质心侧偏角等一些参数状态,使车辆可以安全稳定行驶。
4 驾驶模拟器仿真实验验证
硬件在环仿真实验验证是车辆研发过程中的关键环节。因此,本文利用驾驶模拟器仿真实验平台,对控制策略进一步验证其切实性和实时性。
工况:在驾驶模拟器仿真实验平台上进行蛇形实验,其中路面附着系数为0.5,车速为40 km/h。仿真结果如图10所示。

图(a)是进行蛇形工况时的方向盘转角的变化曲线。图(b)和图(c)分别为横摆角速度和质心侧偏角曲线图,是评价车辆稳定性的指标,从图中可以看出控制后的车辆能够稳定地跟踪上期望值,并且质心侧偏角一直在零附近。图(d)为附加横摆力矩曲线图。图(e)为四轮力矩曲线图,其变化趋势基本与图(d)相同。证明了控制策略具有良好的实时性和可行性。
5 结论
首先在CarSim中建立车辆动力学模型,然后针对提高车辆稳定性的问题提出了横摆力矩控制策略。设计了基于模糊PID控制的横摆力矩控制器和基于规则分配的力矩分配器。本文制定的控制策略通过CarSim/Simulink联合仿真平台和驾驶模拟器硬件在环进行验证。结果表明,本文所提出的横摆力矩控制策略能够在存在失稳趋势时提高车辆的转向稳定性,避免危险的发生,还可以充分提高车辆在极限工况下的操纵稳定性,使车辆能够安全稳定行驶。此外,在驾驶模拟器硬件在环实验平台上可以顺利地进行编译并且能够实时的运行,证明了控制策略的有效性,并且保证良好的实时性。此外,在驾驶模拟器硬件在环实验平台上可以顺利地进行编译并且能够实时的运行,证明了控制策略的有效性,并且保证良好的实时性。
[1] 马春卉, 吴志林, 王良模, 等. 汽车ESP系统的建模和控制方法[J].南京理工大学学报, 2010,34(1): 108-112.
[2] 孔振兴, 皮大伟, 王显会, 等. 基于模糊规则的路面附着识别算法研究[J].南京理工大学学报, 2016, 40(6): 720-725.
[3] 张金柱, 张洪田, 孙远涛. 电动汽车稳定性的横摆力矩控制[J]. 电机与控制学报, 2012, 16(6): 75-80.
[4] 李亮, 贾钢, 宋健, 等. 汽车动力学稳定性控制研究进展[J]. 机械工程学报, 2013, 49(24): 95-107.
[5] ZANTEN A T V. Bosch ESP systems: 5 Years of Experience[J]. SAE Transactions, 2000, 109(7): 428-436.
[6] DANG J N. Statistical analysis of the effectiveness of electronic stability control (ESC) systems-final report[J]. Fatalities, 2007(145): 41582.
[7] YE A. The effects of electronic stability control(ESC) on crashes—An update[J]. Accident Analysis and Prevention, 2011, 43(3): 1148-1159.
[8] 张东升. 四轮独立驱动电动车稳定性分层控制研究[D].西安: 西安科技大学, 2019.
[9] 王悦, 李春明, 肖磊. 基于模糊控制的分布式电动车辆横摆力矩研究[J]. 计算机仿真, 2020, 37(3): 128-133.
[10] 周鹏. 四轮转向汽车的操纵稳定性控制策略研究[D]. 重庆: 重庆理工大学, 2018.
[11] 余志生. 汽车理论[M]. 5版. 北京: 机械工业出版社, 2009.
Research on Yaw Moment Control of Distributed Electric Vehicle
LU Li-xia, LI Gang
(School of Automobile and Traffic Engineering, Liaoning University of Technology, Jinzhou 121001, China)
Aiming at the handling and stability of distributed electric vehicles, a yaw moment control strategy based on fuzzy PID control is proposed. Based on the 2-degree-of-freedom vehicle model, the expected yaw rate is calculated and the difference is with the actual value. The fuzzy PID control is used to design the yaw moment controller to calculate the additional yaw moment required to track the response parameters of the desired vehicle state, which is controlled by torque distribution. The drive redistributes the torque of each drive wheel. Finally, the simulation experiment of snake-like and double-line shifting conditions is carried out through the CarSim/Simulink co-simulation platform. The results show that the fuzzy PID control algorithm with the yaw rate as the control target can improve the handling stability of the vehicle, which verifies the reliability of the control algorithm.
distributed electric vehicle; fuzzy PID; yaw moment control; co-simulation
10.15916/j.issn1674-3261.2022.03.001
TP311
A
1674-3261(2022)03-0141-07
2021-06-09
辽宁“百千万人才工程”培养经费资助
卢丽霞(1997-),女(满族),辽宁丹东人,硕士生。
李 刚(1979-),男,辽宁朝阳人,教授,博士。
责任编辑:陈 明
