面向电磁特性测量的毫米波级联雷达系统设计
2022-07-15雒梅逸香唐文明陈浩宇
张 苏,谭 恺,雒梅逸香,唐文明,陈浩宇,徐 丰
(1.复旦大学 信息科学与工程学院,上海 200433;2.上海御渡半导体科技有限公司,上海 201306)
0 引言
毫米波雷达系统广泛应用在民用领域中,例如航空领域用于探测障碍物,保证民用航空的安全;再如工业清洗行业需要判别不同的目标以确定最佳的清洗模式,这都要求对目标的特性进行捕捉。通常地,光学设备可以捕捉目标特性实现目标的分类,但是光谱信息的获取对光线的要求较为严格。此时还可以利用射线技术对目标的信息进行提取,但是成本较高且精度较低。另外,即使在光照条件良好的条件下,很多物体也很难进行识别。因此需要利用毫米波雷达不限于天气因素和光照条件约束的优势,进行目标的电磁特性测量。
目前较多毫米波系统应用到目标的电磁特性测量当中,浙江工业大学团队利用毫米波雷达传感器采集不同物体的回波,获取去噪后的包络信息,得出结论:在相同距离下,毫米波雷达获得的不同目标回波的包络信息是不同的,然后构建机器学习分类器实现物体的判别。加利福尼亚大学利用宽频毫米波互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)接收器,实现了毫米波信号的相干检测,验证了该系统可以记录W 波段脉冲通过多种固体目标的传输功率。新加坡南洋理工大学团队利用94 GHz 的毫米波雷达系统进行多层复合材料嵌入缺陷检测与识别,利用自动三维--平台实现合成孔径的获取,结合反向投影算法得到输出图像检测2 个扫描方向的缺陷异常。这些方法或作用距离很近,在远距离情况下无法判定回波源自目标还是杂波;或不能进行成像,很难提取目标散射特征;或最多具备2 个通道,可以测量方向,但是角度分辨率过低,不具备空间分辨能力。
本文选用Texas Instrument(TI)公司设计生产的四芯片级联雷达射频板卡(AWR1243P Four-Device Cascade RF)和研制的高速信号处理板组成毫米波级联雷达系统,相比之前惯用的单芯片毫米波雷达系统,该系统可以对目标进行级联雷达成像,根据不同入射角及目标本身的区别得到不同强度的散射信息,以不同目标之间的电磁特性比较,受益于射频板卡12 发16 收的天线分布,具备空间分辨率能力。本文首先进行了系统硬件组成的介绍,然后进行了天线发射信号和成像算法的分析,最后进行了级联雷达的点目标成像以及复杂目标成像实验。实验结果验证了毫米波级联雷达的分辨能力以及电磁特性测量的能力。
1 系统介绍
1.1 射频板卡
毫米波级联雷达系统选用TI公司设计生产的四芯片级联雷达射频板卡作为主要传感器。该板卡属于多输入输出(Multiple-Input Multiple-Output,MIMO)雷达,工作在77~81 GHz 波段,中心波长为3.9 mm,属于毫米波段。该级联雷达相比单芯片雷达,不仅可以对目标距离和速度进行探测,还具备极高的角度分辨率和自由度,可以获取目标的三维坐标及速度,实现目标的4D 成像,获取目标的空间位置。毫米波级联雷达射频板卡的实物图如图1 所示。它由4 片3 发4 收的射频芯片级联而成,构成12 发16 收的天线阵面,信号发射模式为时分多址(Time Division Multiple Access,TDMA)。图1 中,红色框所示为级联雷达的接收天线,蓝色框所示为级联雷达的发射天线。总体来说,该级联雷达的主要优势在于:可对目标进行三维高分辨成像,有效提取目标的空间位置、几何特征以及散射特性;可以通过数字波束合成(Digital Beamforming,DBF)技术控制发射信号的指向,扫描区域远大于普通雷达,水平方向视场角(Field of View,FOV)为[-60°,60°]。
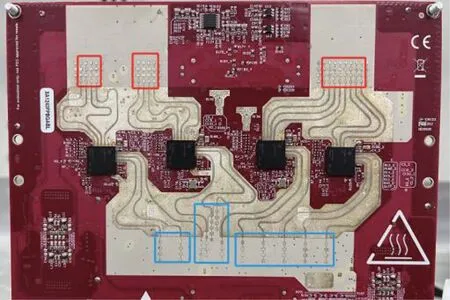
图1 77 GHz 毫米波级联射频板卡Fig.1 77 GHz millimeter wave cascade radio frequency card
为研究图1 所示的毫米波级联雷达射频板卡的空间分辨能力,对其天线结构进行分析,对应的天线结构如图2 所示。其中,R为接收天线,T为发射天线,为该毫米波级联雷达的波长,对应3.9 mm。从图2 的天线分布可以看出,该射频板不仅在水平方向()上具有较长的孔径,在垂直方向()上也排布了3 个单独的发射天线,使得毫米波级联雷达在水平和垂直方向上都能得到一定的分辨能力,角度分辨率可达到1.8°左右,使得应用该射频板卡探测同距离且同速度的目标时,从空间的角度上也可实现对目标的区分。
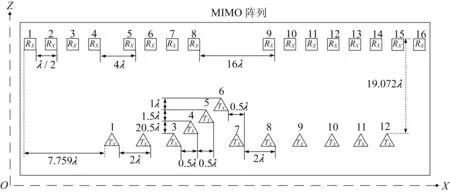
图2 级联雷达天线阵列Fig.2 Cascade radar antenna array
根据射频板卡的天线分布,可以得到该射频板卡在水平方向上的分辨率和垂直方向上的分辨率:
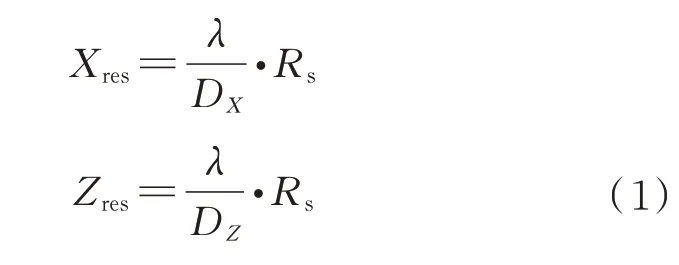
式中:D和D分别为水平方向()和垂直方向()上收发天线孔径分布长度;为级联雷达相对成像目标的参考距离。
1.2 高速信号处理板卡
图1 所示的毫米波级联雷达射频板卡由于具备通道数目多、发射信号时间短等特点,需要采用高采样频率、高传输速率的数字信号处理板保存与处理数据,因而配备采用现场可编程逻辑门阵列(Field Programmable Gate Array,FPGA)与单片机异构架构的高速信号处理板,其中FPGA 选型为XCKU040,单片机选型为GD32F307E。该高速信号处理板由苏州深见智能科技有限公司和我方联合研发,对每个通道的采样频率为4 MHz,可以有效采集并存储各通道获取的目标回波数据,板卡实物图如图3 所示。
1.3 毫米波级联雷达系统
毫米波级联雷达系统由毫米波级联雷达射频板(如图1 所示)和高速信号处理板(如图3 所示)组成,该系统的主要工程流程如图4 所示。

图3 高速信号处理板Fig.3 High-speed signal processing board
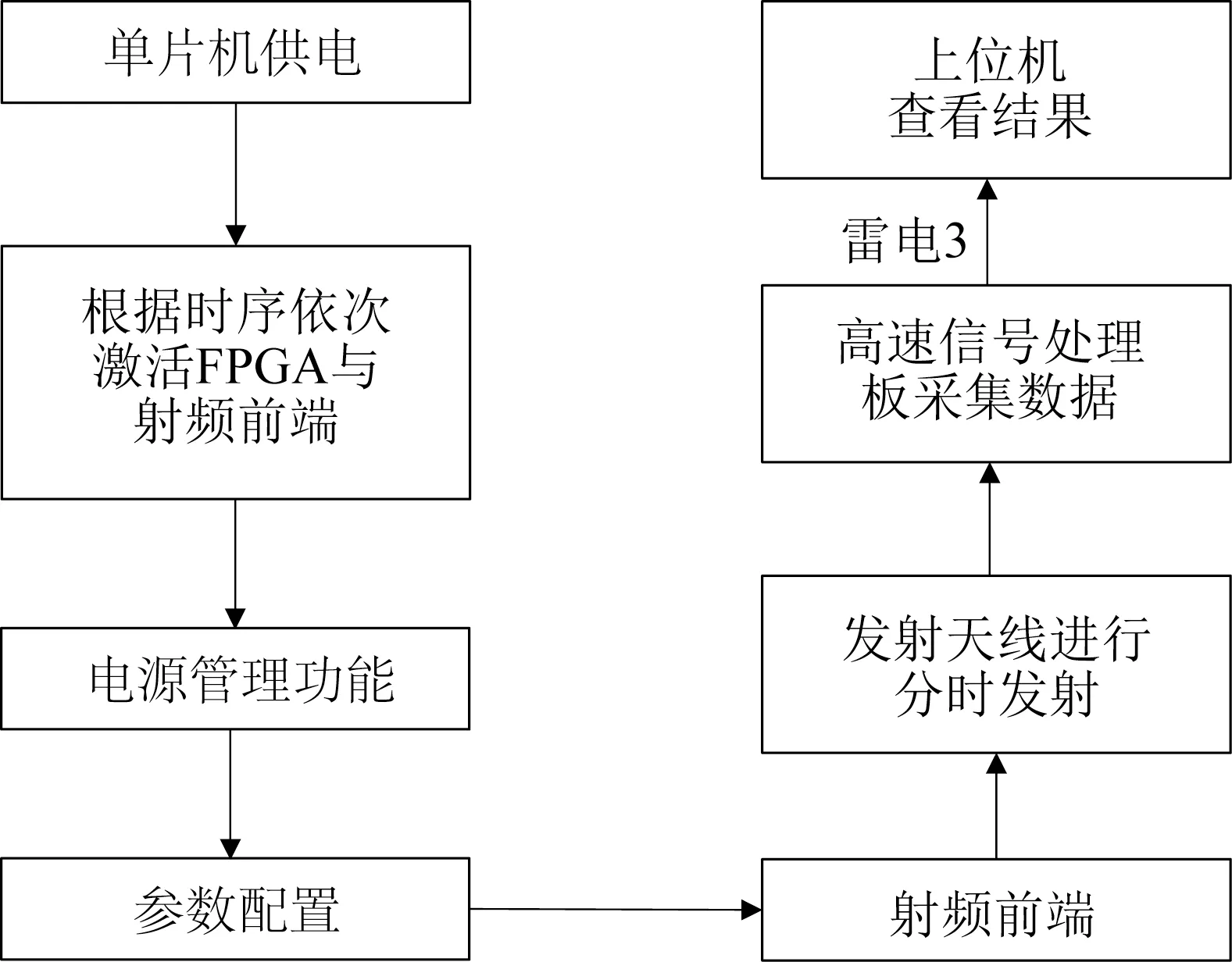
图4 毫米波级联雷达系统工作流程Fig.4 Flow chart of millimeter wave cascade radar system operation
具体地,首先给单片机供电,根据时序依次激活FPGA 与射频前端完成电源管理功能;通过参数配置功能,将配置好的信号调制参数发送给射频前端;发射天线进行分时发射,再利用高速信号处理板对回波信号进行数字采样及处理;最后通过图3绿色框标注的雷电3 接口发送至上位机,可以实时查看各通道采集的数据波形结果。该系统的主要优势包括:
1)由单片机完成对整个系统的实时控制。在系统工作期间,单片机对板卡的功率和温度进行监测与控制,防止温度过高或短路,有效保障设备安全,延长系统使用寿命。
2)前后端均采用高速数据接口。MIMO 天线通过16 路低电压差分信号(Low-Voltage Differential Signaling,LVDS)与FPGA 连接,信号处理板通过雷电3 接口与上位机连接,实现信号实时传输,并具有较高的刷新率。此外,LVDS 每路传输速度为600 Mbit/s,雷电3 接口的设计和使用使得系统数据传输速度可达到20 Gbit/s。
2 信号模型
本毫米波级联雷达系统的发射波形为锯齿状调频连续波(Frequency-Modulated Continuous Wave,FMCW),它具有高分辨率和低发射功率等优点。设FMCW 发射信号的参数信息如下:为调频起始频率,为调频周期,为调频斜率,则第个点目标的回波信号可以表示为

式中:为第个目标的回波信号的振幅;rect(·)为窗函数;为快时间;τ为第个点目标的回波时延,是该目标到收发天线的距离与光速的函数。
根据图2 所示级联雷达天线分布结构,可把级联雷达的第个发射天线的空间三维坐标设为(t,t,t),其中∈[1,12];再设级联雷达的第个接收天线的坐标为(r,r,r),其中∈[1,16]。雷达视线区域内的第个散射点坐标为(x,x,x),则该级联雷达第个发射天线和第个接收天线到目标第个散射点的距离R和R为

面向由级联雷达接收到的回波数据,选用了后向投影(Back Projection,BP)算法进行成像。该算法对雷达孔径的结构和排布没有硬性要求,对图2 所示收发天线分布不均匀的级联雷达回波数据也可以得到聚焦效果良好的成像结果。BP 算法面向级联雷达所得回波数据的成像步骤如下:
对回波数据进行距离压缩,每一个回波脉冲都存储着该发射信号在该时刻成像目标的距离维信息;
对目标成像区域进行像素点划分,依次计算不同发射天线和接收天线组合相对该像素点的时延;
遍历所有的发射天线和接收天线组合相干叠加,遍历步骤2 中划分的区域,即可得到该成像区域的聚焦成像结果。
另外,因为本级联雷达系统发射的信号为FMCW,在进行距离压缩的过程中可以直接通过傅里叶变换实现,避免了匹配滤波的过程。
3 级联雷达成像实验
3.1 点目标成像实验
首先利用毫米波级联雷达系统进行点目标成像实验,成像点目标选用边长为3 cm 的角反射器。图5(a)所示为毫米波级联雷达点目标成像实验场景图,级联雷达的天线分布面平行于吸波材料墙面,把单个角反射器放置于吸波材料墙上,以雷达中心为原点建立空间坐标系,角反射器到级联雷达的径向(方向)距离为1.2 m,系统发射FMCW 参数详见表1。图5(b)为修正后单个角反射器的成像结果,明显地,角反射器的回波数据得到聚焦。图5(c)为对应的3 dB 示意图,可以得到该级联雷达系统在水平方向的实际分辨率为0.028 m,垂直方向上的实际分辨率为0.064 m。
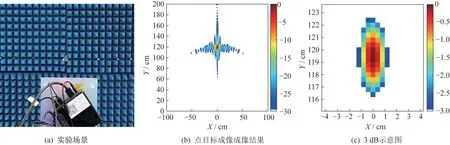
图5 点目标成像实验Fig.5 Imaging experiment for a point target

表1 级联雷达发射信号参数Tab.1 Parameters of cascade radar transmit signals
此外进行多个点目标的成像实验,以级联雷达中心在吸波材料墙面的投影为中心点,在水平方向(方向)上距其左右间隔20 cm 处分别放置一个角反射器,实验场景图如图6(a)所示,系统发射信号参数见表1,所得成像结果如图6(b)所示。从实验结果可以看出,2 个角反射器均得到了有效成像,且坐标位置比较准确,验证了该毫米波级联雷达系统对点目标进行成像的有效性。此外,点目标成像实验所用时间为2.25 s,验证了系统的快速成像能力。
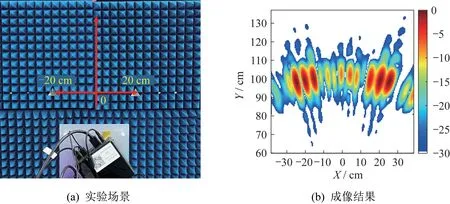
图6 角反射器成像实验Fig.6 Imaging experiment for the angle reflector
3.2 复杂目标成像实验
为了验证毫米波级联雷达系统面向复杂目标的电磁特性测量结果,选用了金属板和水泥板进行成像实验,2 个板材形状均为边长为30 cm 的正方形。实验以级联雷达为中心建立空间坐标系,以级联雷达中心在吸波材料墙面的投影为中心点,在水平方向(方向)上距其左右间隔5 cm 处分别放置水泥板和金属,实验场景图如图7(a)所示。本实验中系统发射信号参数见表1,得到回波数据使用BPA进行成像处理,得到成像结果如图7(b)所示。从中可以看出,金属箔板所在右侧区域的回波信号强度明显高于水泥板所在的左侧区域,可以明显比较得到金属箔板和水泥板的电磁特性差别。复杂目标成像实验所用时间为2.41 s,证明了系统在快速成像上的能力。
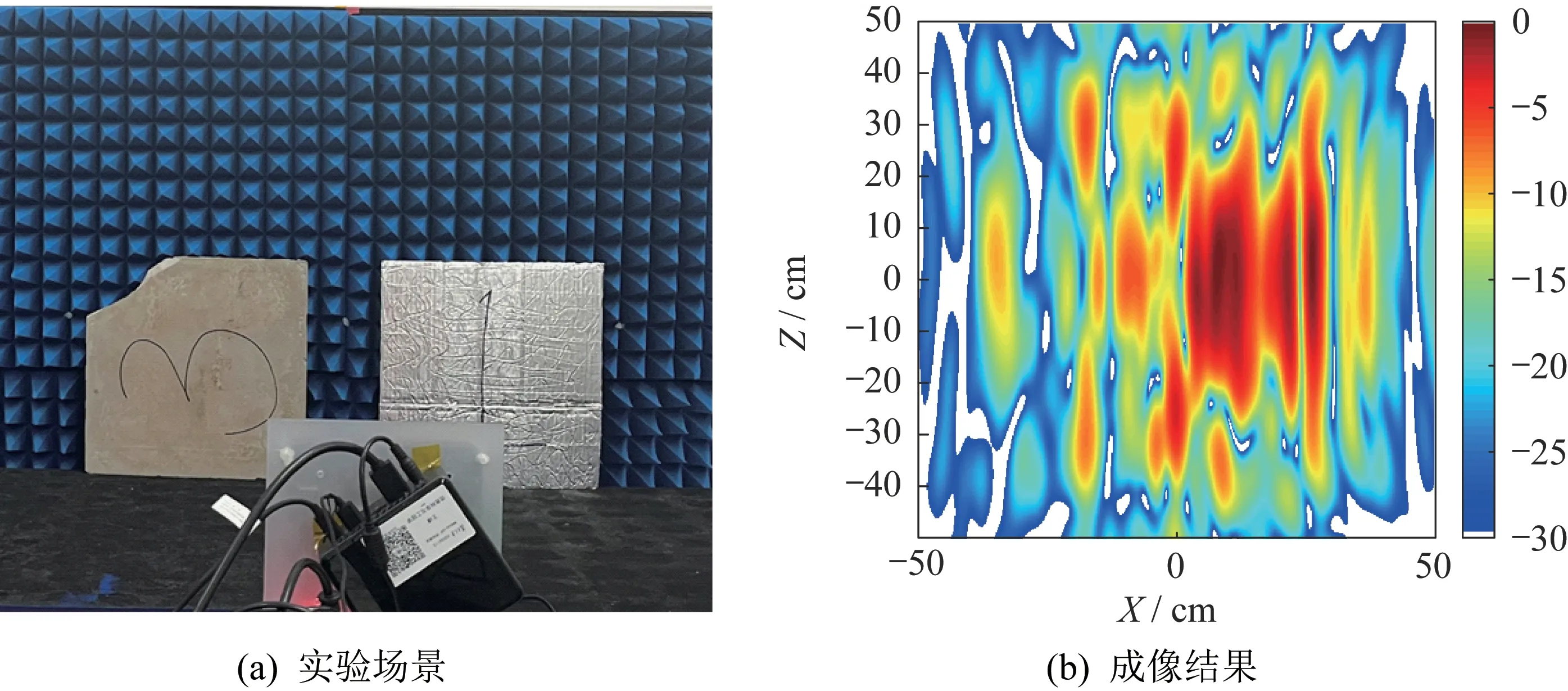
图7 复杂目标成像实验(水泥-金属)Fig.7 Imaging experiment for complex targets(concrete-metal)
4 结束语
面向电磁特性测量的毫米波雷达大多有分辨率低和雷达测量维度低的问题,本文提出一套毫米波级联雷达系统方案。该系统由四芯片级联射频板卡和自研的高速信号处理板构成,可以有效提取目标散射特征,对目标进行成像,且受益于其特殊的天线结构分布,该系统的空间分辨率高。使用该毫米波级联雷达系统展开了实测实验,实验中利用角反射器对系统进行了点目标成像,并根据角反射器的成像结果进行空间分辨率的分析;又利用复杂目标实验板,展开成像实验以进行电磁特性鉴别。实验结果证明,该系统具备良好的空间分辨能力和电磁特性测量能力,为该系统之后用于更多应用提供基础。