FMCW 体制毫米波SAR 实时信号处理方法研究
2022-07-15冯利鹏郑世超曾朝阳
冯利鹏,王 辉,郑世超,曾朝阳,陈 翔
(1.上海卫星工程研究所上海市毫米波空天信息获取及应用技术重点实验室,上海 201109;2.上海航天技术研究院毫米波成像技术重点实验室,上海 201109)
0 引言
与脉冲体制合成孔径雷达(Synthetic Aperture Radar,SAR)相比,调频连续波(Frequency Modulated Continuous Wave,FMCW)体制SAR 发射大时宽信号,而且其占空比为100%,使得这种体制SAR 的平均发射功率很高,峰值发射功率很小,不需要笨重、高功耗的信号发射装置,从而使SAR 系统轻量化和小型化,同时也有隐蔽性好、成本低等诸多优点。
因此,FMCW SAR 特别适合搭载在无人机、小型飞机以及微纳卫星等轻小型平台上。目前,机载SAR 系统一般采用回波数据下传和地面成像处理方式,通过数传链路将运动平台上采集的大量SAR回波数据传回地面,在地面数据处理计算机上进行SAR 成像处理。这种数据处理方式虽然方便,但响应时间慢,在一些紧急情况下,如灾难预警和目标识别,不能快速有效地反馈观测状况。因此,研究一种机载FMCW 体制SAR 实时处理方法很有必要。
在进行SAR 理论研究时,普遍假设载机平台的运动是理想的,即SAR 系统是在做理想的匀速直线运动。实际上载机飞行不可能是理想的,特别是中低空飞行的轻小型飞机或无人机受气流影响严重,必然会产生运动误差。运动误差的存在将导致SAR 回波信号中产生相位误差和包络误差。处理存在运动误差的SAR 回波数据,若是不进行运动补偿而直接使用理想的成像算法,回波信号将出现不同程度的散焦或是根本无法聚焦。
为了提高FMCW 体制毫米波SAR 实时信号处理性能,本文在分析机载FMCW SAR 实测数据基础上,在算法层面上提出了一种包含子孔径数据流以及两次运动误差估计补偿的实时处理算法。
1 FMCW SAR 的基本原理
FMCW SAR 发射线性FMCW 信号,对比于传统脉冲SAR,每个脉冲重复周期内的信号占空比接近于1。若在接收数据时,采用直接采集数据的方式,回波数据量将会十分巨大,为此,FMCW SAR一般采用解线频调(Dechirp)的接收方式。2 种体制SAR 发射信号的时域占空情况如图1 所示。

图1 FMCW 体制SAR 与脉冲体制SAR 占空比/发射功率对比Fig.1 Duty ratio/transmit power comparison of FMCW SAR and pulse SAR
假设天线发射理想的线性FMCW 信号经过目标测绘带场景中的某一点目标反射后被天线接收,直接经过混频器,与参考信号进行混频得到经解线频调处理后的基带信号。
SAR 发射LFM 信号,该发射信号可表示为

式中:为调频率;为发射信号的载频频率;为距离向快时间。
接收天线所接收到的信号为发射天线发射信号的时延信号,表达式为

式中:为点目标回波时延。
用于混频的参考信号表达式为

式中:为参考距离处的点目标回波时延。
经过Dechirp 处理后,接收到的信号变为

将接收到的信号相位对距离快时间求导,可得到距离频率如下:

由式(5)可知,Dechirp 处理将所有经过场景测绘带内各处点目标的回波信号都变为一个单频信号,距离频率瞬时值只与接收信号的回波时延有关。FMCW 体制SAR 采用Dechirp 接收的原理如图2 所示。

图2 FMCW SAR Dechirp 接收原理Fig.2 Dechirp receiving principle of FMCW SAR
由图2 可知,在传统脉冲SAR 系统中,发射信号的脉冲宽度远小于参考信号(用于混频)的脉冲宽度,所以,测绘带场景中所有目标回波信号都得到充分的去调频。而在FMCW SAR 系统中,由于发射信号的占空比为100%,导致参考信号的脉冲宽度与接收信号的脉冲宽度相等,因此,并不是所有目标回波信号都能得到充分的去调频,实际上只有参考信号中所设置的参考距离处的目标回波信号能够得到充分的去调频,绝大部分目标回波信号还存在部分线性调频的特征。FMCW SAR 系统一般将回波信号通过Dechirp 接收后再经过低通滤波,以滤掉在接收滤波器带宽之外具有线性调频的高频部分,将所有回波信号均变为完全的去调频信号,这时所有回波信号的频率也变为了常数。根据傅里叶变换原理,单一频率的复信号经过傅里叶变换后,其函数变为sinc(·)形状,也即完成距离向脉冲压缩。
2 实时成像算法
2.1 子孔径数据流处理
子孔径数据流处理的核心思想是SAR 系统不用每次等待采集完1 个全合成孔径时间的数据然后再进行处理,而是在采集回波数据的同时进行数据处理。也就是说,每次仅仅采集1 个子孔径数据,该子孔径的长度远小于1 个全合成孔径长度,并且在完成采集下一个子孔径数据之前进行上一个子孔径数据的部分处理步骤,形成子孔径数据流的流水线架构。采用这种流水线并行架构,FMCW 体制SAR 系统可以降低数据的临时存储量和数据的运算时间。
SAR 系统子孔径采集数据的几何平面图如图3所示,载机沿着飞行航线从P飞行到P进行第次子孔径数据录取,t为第块子孔径数据的时间中心,为子孔径数据的方位慢时间。
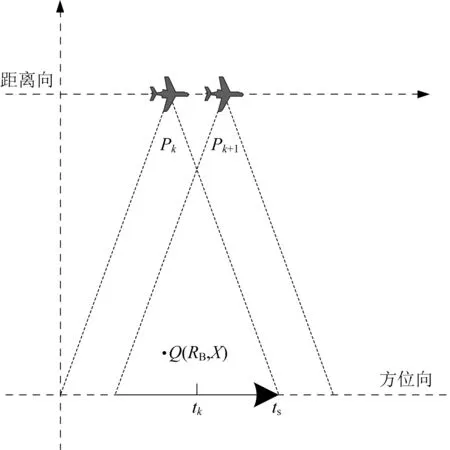
图3 子孔径数据采集的几何平面Fig.3 Geometric plan of subaperture data acquisition
子孔径数据流误差提取的概念图如图4 所示,载机沿航线从飞行到P,一共进行了次数据采集,每次采集到的子孔径数据经过信号预处理(包括距离向脉冲压缩、频谱有效部分截取、子孔径误差估计等)得到子孔径数据误差,通过不断拼接下一块子孔径数据的误差使误差曲线逐渐积累,直至提取并完成拼接最后一块子孔径数据(相对于全孔径数据而言)的误差得到全部录取数据的误差曲线。从图4 还可以看出,该算法可以在数据录取的同时进行信号预处理,也就是说从SAR系统第二次采集数据始,在完成采集下一次子孔径数据结束之前,完成上一次子孔径数据的信号预处理、误差拟合和拼接,形成流水并行架构。这样,在采集完一个全孔径数据之后,仅仅等待一个子孔径数据的信号预处理时间,即得到全孔径数据的误差曲线;然后直接经过误差补偿、方位脉压,即可完成成像处理的全过程,适合FMCW SAR 实时成像处理。
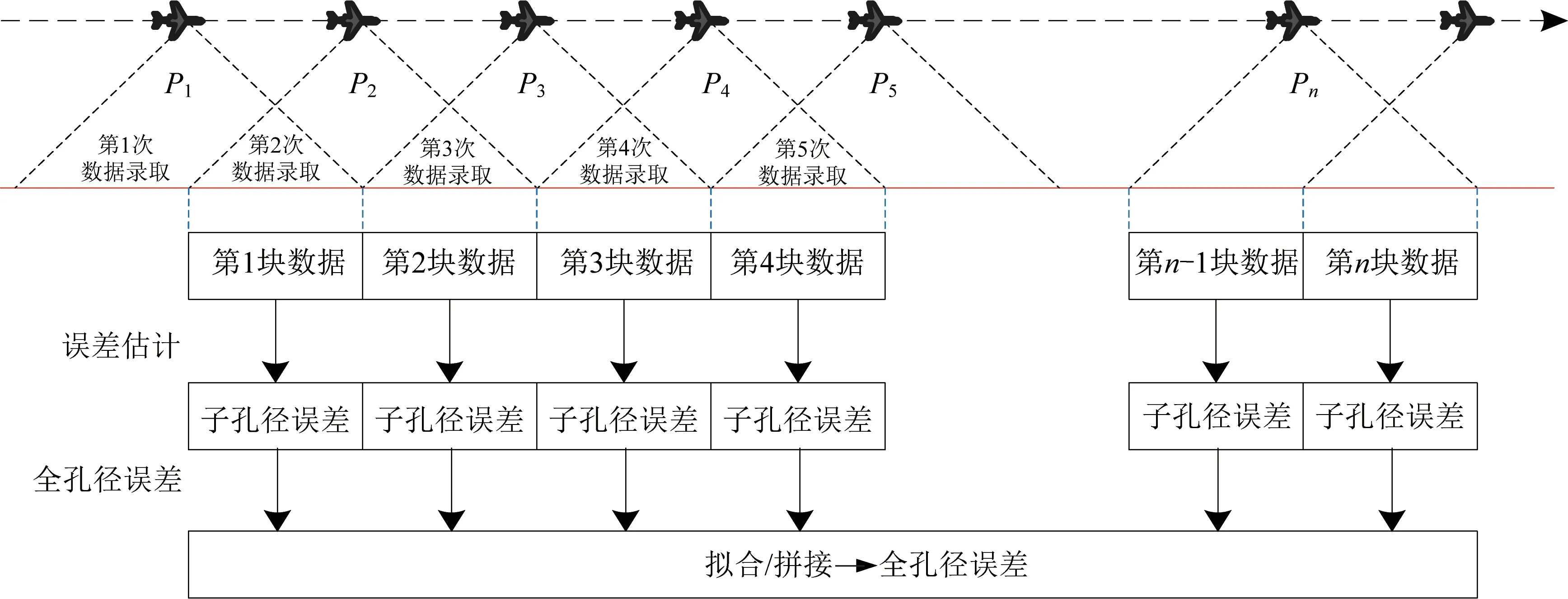
图4 子孔径数据流误差提取概念Fig.4 Conceptual diagram of subaperture data stream error extraction
2.2 基于PGA 和MD 联合误差估计的子孔径误差
提取与全孔径误差拼接
在SAR 的基本原理中,雷达平台通过运动形成长的等效天线孔径,从而获得方位向高分辨率。在这种情况下,雷达平台被认为在空中运动状态是匀速直线运动。而在真实情况中,载机平台受到气流、自身震动等因素影响,导致载机的运动存在俯仰、偏航、横滚等方向的运动误差。如果不采取运动补偿,将使成像结果恶化。
目前,机载SAR 的运动补偿主要有2 种方法:1)基于惯导数据的运动误差补偿方法;2)基于回波数据的运动误差补偿方法。本文采取第2 种基于回波数据的相位梯度自聚焦(Phase Gradient Autofocus,PGA)和图像偏置算法(Map Drift,MD)运动误差估计方法相结合的中心波束平面运动补偿方法,提高了载机运动误差估计精度和成像效果。
PGA 是应用广泛、行之有效的一种相位补偿方法,该算法的独特之处在于它不是基于模型,而是基于图像中某些特显点的散焦状况进行自聚焦处理,从而使整个图像因相位误差造成的散焦情况得到改善。PGA 算法流程如图5 所示。
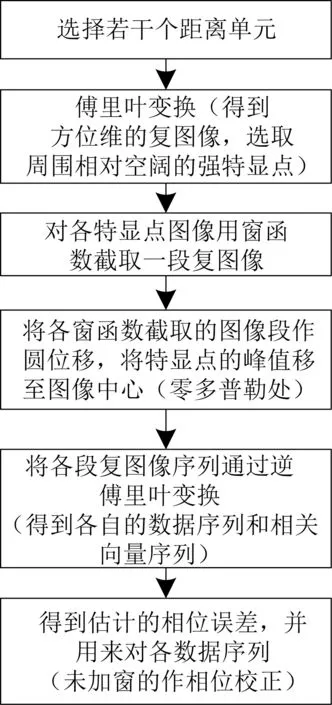
图5 PGA 算法流程Fig.5 Flow chart of the PGA algorithm
总而言之,相位梯度自聚焦是一种基于图像中某些特显点的散焦状况进行自聚焦处理的相位补偿方法。通过多次迭代将由相位误差导致聚焦变形的点恢复正常。虽然,PGA 算法对高次相位误差也有较好的校正能力,但是,PGA 需要目标场景中有强点,限制了PGA 的应用范围,也是对成像场景进行相关约束的原因。为了更好地估计各种场景下的载机运动误差,本文在使用PGA 算法的同时,增加使用MD 算法。
MD 算法能基于雷达的回波数据估计出多普勒调频率。在使用MD 算法进行实测数据多普勒调频率估计的时候,要注意子孔径长度的大小,根据惯导信息得出来的飞行情况调节,尽量使子孔径时间里的载机速度变化不大和垂直于航线向的运动加速度为常数,特别适用于文中所提子孔径数据误差估计的方法。
为使回波序列能反映出多普勒调频率,回波序列的长度要适当长一些,如图6 所示。但在用以估计的一段时间里要求载机沿航线的速度基本不变,且垂直于航线向的运动加速度为常数。
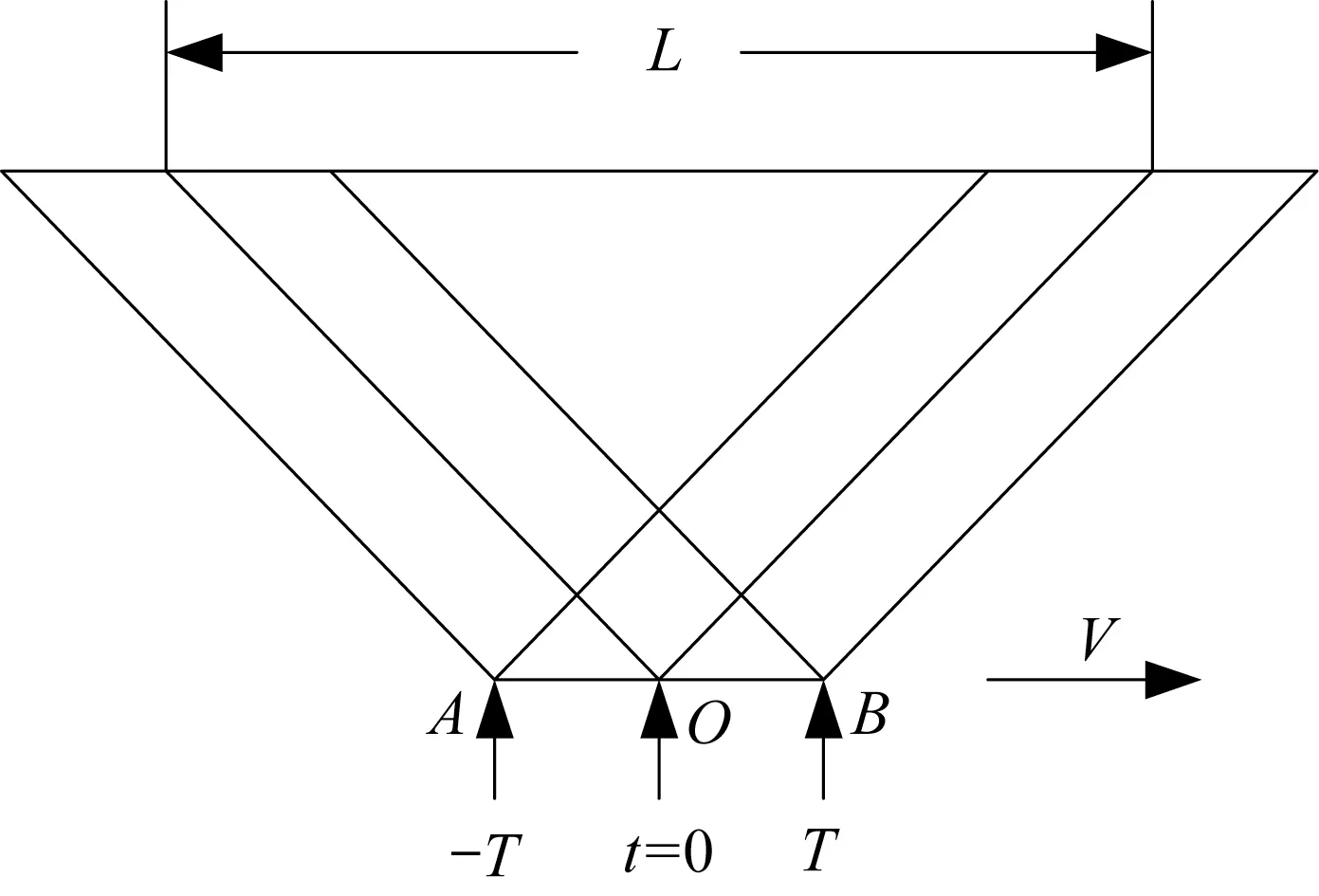
图6 估计多普勒调频率的时间段Fig.6 Schematic diagram of the time period for estimating Doppler modulation frequency
2.3 实时成像算法
实时成像算法流程图如图7 所示。首先提取惯导信息及原始回波数据,对子孔径数据流分别进行距离向快速傅里叶变换(距离向FFT,也即距离脉冲压缩)、回波预处理(包括频谱有效信息截取等)、2 次误差估计(相位自聚焦估计算法和MD 联合估计)、子孔径误差拼接、拟合构造全孔径误差,对全孔径回波的包络误差和相位误差进行补偿;接着进行方位向匹配滤波和方位向多视完成全孔径成像。

图7 实时成像算法流程Fig.7 Flow chart of the real-time imaging algorithm
3 实测数据处理结果
选择上海卫星工程研究所王辉团队项目某次毫米波机载FMCW 体制SAR 飞行数据作为实测数据处理,验证算法的有效性。毫米波FMCW SAR 成像结果图如图8 所示。

图8 毫米波FMCW SAR 成像结果Fig.8 Results of millimeter wave FMCW SAR imaging
从图8 中可以看到图像信噪比很高,聚焦效果好,地物边缘轮廓更加清晰,高压电线塔及高压电线轮廓清晰可见。由于Ka 波段高、波长短,因此距离带宽更大,所以经过本文的机载FMCW SAR 实时成像算法进行处理后,得到SAR 图像更清晰更细腻,信噪比也更好,可以观察到的目标细节特性信息更多,描述物体特征的散射特性更加明显。
4 结束语
本文提出了基于子孔径数据流和2 次运动误差估计补偿的机载FMCW 体制毫米波SAR 实时成像算法。为了说明本文算法的有效性以及良好的实时性,给出了实测数据的成像结果,验证了本文算法适用于FMCW 体制毫米波SAR 实时成像处理,为未来机载FMCW 体制毫米波SAR 实时处理研究打下了基础。