移动机器人视觉SLAM研究综述
2022-07-15李延真石立国徐志根夏清泉
李延真,石立国,徐志根,程 超,夏清泉
(国网山东省电力公司青岛供电公司,山东 青岛 266001)
0 引 言
同时定位与建图(Simultaneous Localization And Mapping,SLAM)是移动机器人领域的一个具有挑战性的难题。目前SLAM技术研究主要集中于两种方法,一是基于便携式激光测距仪的方法,即激光SLAM,另一种是基于计算机视觉的方法,即视觉SLAM。采用激光雷达构建的点云地图,在某种程度上无法展现较好的环境细节信息,以至于智能机器人在环境复杂的场景中,不能有效的进行环境信息感知和决策。随着计算机技术以及视觉传感器技术的发展,视觉SLAM采用相机来替代激光雷达重构周围环境的3D地图,已取得了巨大且快速的发展。而且,图像中包含更加丰富的环境特征信息,以使得机器人能够在更大范围内完成任务。此外,视觉传感器的发展以及深度相机、立体相机的出现和改进,吸引了许多学者对视觉SLAM技术进行了大量的研究。视觉SLAM主要由特征提取、特征跟踪、运动跟踪、闭环检测、地图构建、位姿估计等部分组成。
1 视觉SLAM概述
经典视觉SLAM框架如图1所示,通常包含传感器数据输入、前端、后端、地图构建以及闭环检测。前端获取传感器原始数据,并对数据进行预处理。例如特征提取,短期和长期数据关联等操作,以便将几何信息转换为数学模型并将其发送到后端。后端对前端的输入模型进行优化、最小化相机姿态的累计误差,以及地图信息的优化调整。闭环检测将相机图像的检测结果送到后端处理,通过计算图像相似性,对机器人经过的场景进行识别比对,从而实现累计误差的消除。
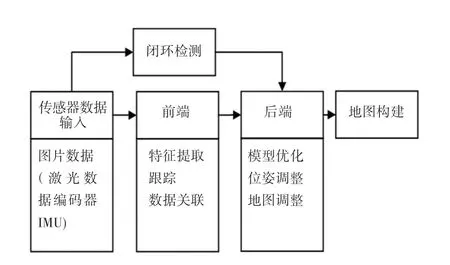
图1 经典SLAM框架Fig.1 Classic SLAM framework
根据视觉传感器的不同,视觉SLAM主要分为单目、RGB-D、立体视觉SLAM等方法。其中,采用单相机解决SLAM问题的方案称为单目SLAM;而RGB-D SLAM方法不仅需要单目相机,并且需要用到红外传感器;立体视觉SLAM则需要在不同方位安装多个相机。视觉传感器一般具有视觉里程测量功能,具有足够的稳定性和鲁棒性,而且易于实现。
近十年来,SLAM算法有很多,主要分为基于直接法的视觉SLAM和基于特征点法的视觉SLAM两大类。
1.1 经典SLAM方法
1.1.1 基于特征点的视觉SLAM
Davison等人提出了一种单目SLAM方法,称为MonoSLAM。MonoSLAM采用EKF算法建立环境特征点的地图,这种地图虽有一定限制,但在解决单目特征初始化的问题上足够稳定。此外,地图的稀疏性也暴露了机器人在需要更多环境细节的情况下,无法完成定位任务的问题。为此,研究出现了UKF方法以及改进的UKF方法,用于解决视觉SLAM的线性不确定性。而Sim等人提出的基于PF的单目SLAM方法可以构建更精确的映射,但PF方法的算法具有很高的计算复杂度,以至于无法在大型环境下应用。Klein等人设计了一种基于关键帧的单目SLAM方法,即PTAM。在该方法中,跟踪和建图分为两个并行化的任务。关键帧提取技术,即通过数个关键图像串联,优化地图和运动轨迹,从而避免了对每一幅图像的细节进行处理。这种方法采用非线性优化来替代EKF方法解决线性化的困难,进而减少了机器人在定位中的不确定性。但是,由于PTAM存在全局优化的问题,使得该方法无法在大型环境中应用。
2015年,Mur-Artal等人提出了一种新的实时视觉SLAM方法---ORB-SLAM。该方法是一种基于特征法的单目SLAM,实时估计3D特征位置和重建环境地图,其特征计算具有良好的旋转和缩放不变性,具有较高的定位精度。但该方法使得CPU运算负担大,生成的地图仅用于定位需求,无法用于导航和避障需求。为此,Mur-Artal等于2017年又提出了一种改进算法,即基于ORB-SLAM的ORBSLAM2,其不仅支持RGB-D相机以外的单目相机还支持使用立体相机。
然而,ORB-SLAM2是通过大规模数据生成训练词汇,当词汇量较大时,其过程对于移动机器人来说是非常耗时的。在机器人工作环境固定的情况下,使用大数据集会导致大量无效数据的产生。此外,ORB-SLAM2还缺乏离线可视化和轨迹建图的能力。
1.1.2 基于直接法的视觉SLAM
1.ene modo-yi tülekü ɡejü beledkejü bui(我要把这根木头烧了/我想烧掉这根木头)
LSD-SLAM、DTAM是基于直接法的单目SLAM方法,使用RGB图像作为输入,通过所有像素强度估计相机的帧轨迹和重建环境的3D地图。DTAM是一种直接稠密的方法,通过在相机视频流中提取多张静态场景图片来提高单个数据信息的准确性,从而实时生成精确的深度地图。该方法计算复杂度比较大,需要GPU并行运算,对全局照明处理的鲁棒性较差。
LSD-SLAM能够构建一个半稠密的全局稳定的环境地图,包含了更全面的环境表示,在CPU上实现了半稠密场景的重建。该方法对相机内参敏感和曝光敏感,需要特征点进行回环检测,无法在照明不规律变化的场景中应用。
Forster等人提出的SVO(Semi-direct Visual Odoemtry),是一种半直接法的视觉里程计,其是特征点和直接法的混合使用,该方法的时间复杂度较低,但是,该方法舍弃了后端优化和回环检测,而且位姿估计会产生累积误差,因此在移动机器人丢失位置后重定位比较困难。
DSO(Direct Sparse Odometry)也是一种半直接法的视觉里程计,基于高度精确的稀疏直接结构和运动公式。该方法能够直接优化光度误差,考虑了光度标定模型,该方法不仅完善了直接法位姿估计的误差模型,还加入了仿射亮度变换、光度标定、深度优化等方法,在无特征的区域中也可以使其具有鲁棒性。但是,该方法舍弃了回环检测。
2 视觉SLAM研究热点
2.1 视觉与惯性传感器融合的SLAM
VI-SLAM(Visual-Inertial SLAM)将视觉传感器和IMU优势结合,从而为移动机器人提供更加丰富的运动信息和环境信息。其主要方式将视觉前段信息与IMU信息结合,即视觉惯性里程计(VIO),采用滤波技术以及优化方法,对采集的物理量信息进行处理,进而实现对自身的运动和环境信息估计。当视觉传感器在短时间内快速运动失效时,融合IMU数据能够为视觉提供短时的精准定位,同时利用视觉定位信息来估计IMU的零偏,减少IMU由零偏导致的发散和累积误差。通过二者的融合,可以解决视觉位姿估计输出频率低的问题,同时位姿估计精度有一定的提高,整个系统也更加鲁棒。目前VI-SLAM已在机器人、无人机、无人驾驶、AR和VR等多个领域有所应用。
MSCKF算法将视觉与惯性信息在EKF框架下融合,相较于单纯的VO算法,该算法能够应用在运动剧烈、纹理短时间缺失等环境中,而且鲁棒性更好;相较于基于优化的VIO算法(VINS,OKVIS),MSCKF精度相当、速度更快,适合在计算资源有限的嵌入式平台运行。ROVIO是基于单目相机开发的紧耦合VIO系统,通过对图像块的滤波实现VIO,利用扩展卡尔曼滤波进行状态估计,使用速度更快的FAST来提取角点,其三维坐标用向量和距离表示。其次,所有角点是通过图像块进行描述,并通过视频流获取了多层次表达;最后利用IMU估计的位姿来计算特征投影后的光度误差,并将其用于后续优化。虽然该算法计算量小,但对应不同的设备需要调参数(参数对精度很重要),并且没有闭环,经常存在误差,会残留到下一时刻。
2.2 视觉与激光雷达融合的SLAM
视觉与激光雷达融合的SLAM,是将激光雷达在建图和距离测量时准确度较好的优势,与视觉方法构建环境信息较准确的优势相结合,在一定程度上能够避免单相机在使用过程中的单目尺度漂移、双目深度估计精度不高、户外RGB-D稠密重建困难的缺陷,将有效提升SLAM性能。其确定是标定和融合比较困难。
视觉与激光雷达融合的SLAM主要分为:改进的视觉SLAM、改进的激光SLAM以及并行激光与视觉SLAM。
J.Graeter等人提出了一种激光-视觉里程计方法(LiDAR-Monocular Visual Odometry,LIMO)。该方法从LiDAR中提取图片中特征点的深度,不仅考虑局部平面假设的外点,并考虑了地面点。Shin等人利用LiDAR提供的稀疏深度,提出了一种基于单目相机直接法的视觉SLAM框架。采用滑动窗口进行追踪的方法,忽略旧的关键帧,不在大规模场景下集成了深度的帧与帧的匹配方法。这种方法相机分辨率比激光雷达分辨率高,从而导致许多像素缺失深度信息。为处理相机和激光雷达分辨率匹配的问题,De Silva等人在计算两个传感器之间的几何变换后,采用高斯过程回归,对缺失值进行插值。Scherer等人采用VIO对机器人的状态进行估计,采用激光雷达进行障碍物及边界检测,但是激光雷达的点云数据可能包含遮挡点,从而对精度有一定的影响。为提高精度,Huang等人提出一种基于直接法的SLAM方法,采用遮挡点检测器和共面点检测器解决这一问题。
在一些研究中,视觉-激光SLAM,采用激光雷达扫描匹配进行运动估计,相机进行特征检测,从而对纯激光SLAM的缺陷进行相应的弥补。Liang等人提出了一种解决激光和相机传感器集成的大规模激光碰撞中的闭环问题。其利用ORB特征和词袋特征,实现了环路检测的快速、鲁棒性。通过在不同大规模环境下的实验,验证了该方法的有效性。Zhu等人将3D激光SLAM和视觉关键帧词袋回环检测相融合,并对最近点迭代(ICP)进行优化。Pandey等人利用3D点云与可用相机图像的共配准,将高尺度特征描述符(如尺度不变特征变换(SIFT)或加速鲁棒特征(SURF))与3D点相关联,即利用视觉信息对刚性转换做了预测,并且建立通用的ICP框架。
此外,并发视觉激光融合也是一个研究方向。Seo等人同时采用激光雷达和视觉传感器并行构建了两个地图:激光雷达立体像素地图和具有地图点的视觉地图,并在后端优化中运用残差对里程求解,使其保持全局一致,从而能够更好的进行状态估计,是一种紧耦合的方法。Zhang等人提出一种视觉雷达里程计的通用框架。该方法使用高频运行的视觉里程计作为图像帧速率(60 Hz)来估计运动,并使用低频率(1 Hz)激光雷达测距仪细化运动估计,并消除由视觉测距漂移引起的点云失真。
2.3 基于深度学习的视觉SLAM
将深度学习理论引入视觉SLAM中,主要应用包含:使用深度神经网络对单目视觉深度进行估计;将深度学习与视觉SLAM前端结合,从而提高图像特征提取的准确度;融入物体识别、目标检测、语音分割等技术,进而增加对周围环境信息的感知与理解。
Zhou等人提出了一种单目深度和位姿估计的无监督学习网络,其特点是完全无监督网络,从非结构化视频序列进行单视图深度估计和多视图位姿估计,但得到的深度和位姿缺乏系统尺度。Godard等人提出了一种卷积神经网络,替代了直接用深度图数据训练,采用容易获得的双目立体视觉的角度,在没有参考深度数据的情况下,估计单个图像的深度,从而可以执行端到端无监督单眼深度估计,并加强左右视差图的一致性,从而提升性能和鲁棒性。Mahjourian等人提出了一种基于无监督学习的新方法,对单目视频中的深度与自我运动的估计,最终作者在KITTI数据集和手机拍摄的微景观标定的视频数据集上进行了算法验证。Daniel DeTone等人提出了一种DeepSlam,在存在图像噪声的情况下进行特征点检测,相比传统方案,具有显著的性能差距。此外,DeTone等人还提出了一个自监督框架SuperPoint,适用于计算机视觉中大量多视图几何问题的兴趣点检测器和描述符的训练。Jiexiong Tang等人提出了一种基于深度学习的GCNv2网络(GCN-SLAM),用于生成关键点和描述符。
JohnMcCormac等人提出了Semanticfusion方法,使用CNN进行语义分割,加上条件随机场对分割结果的优化,设计了semantic mapping系统,是一种将CNN和最先进的稠密SLAM融合方案。Thomas Whelan等人提出了ElasticFusion,用来构建语义三维地图。Bowman等人提出一种融合尺度信息与语义信息的理论框架,通过对目标进行相应的检测,将尺度信息和语义信息结合,从而实现对运动估计和地图的优化。
2.4 动态环境下的视觉SLAM
目前,大部分的研究都是基于静态环境,而且光线良好,且为非单调纹理特征的情形。但实际生活场景中还会有大量动态的行人或者物体,所以研究动态环境下的SLAM也是极其重要的。其关键技术就是将动态的行人或物品等特征点,能够在地图中过滤移除,避免对定位和闭环检测产生不良影响
为此,Wei Tan等人提出了RDSLAM(Robust monocular slam)方法,其是一种基于关键帧的在线表示和更新方法的实时单目SLAM系统。该方法可以处理缓慢变化的动态环境,能够检测变化并及时更新地图。Chao Yu等人提出了一个面对动态环境的语义视觉SLAM系统DS-SLAM。该方法结合语义信息和运动特征点检测,来滤除每一帧中的动态物体,从而提高位姿估计的准确性,同时建立语义八叉树地图。其是基于优化ORB-SLAM的方法,使其具有更好的鲁棒性。 MaskFusion是由RÜNZ M等人提出的一个实时的、具备对象感知功能的、语义和动态RGB-D SLAM系统。该方法在连续的、自主运动中,能够在跟踪和重建的同时,识别分割场景中不同的物体并分配语义类别标签。DynaSLAM是一个在动态环境下辅助静态地图的SLAM系统,通过增加运动分割方法使其在动态环境中具有稳健性,并且能够对动态物品遮挡的部分进行修复优化,生成静态场景地图。StaticFusion是一种面向动态环境基于面元的RGB-D SLAM系统,能够在动态环境中检测运动目标并同时重建背景结构,但该方法的初始若干帧内不能有大量动态物体,否则初始静态场景面元地图的不准确性增加。
3 结束语
在视觉SLAM发展的三十年里,已取得了重大的成果,形成一些常用的框架方法,在机器人、无人机、无人驾驶、AR和VR等多个领域已有所应用。针对视觉SLAM经典研究方法的特点做一总结,见表1。
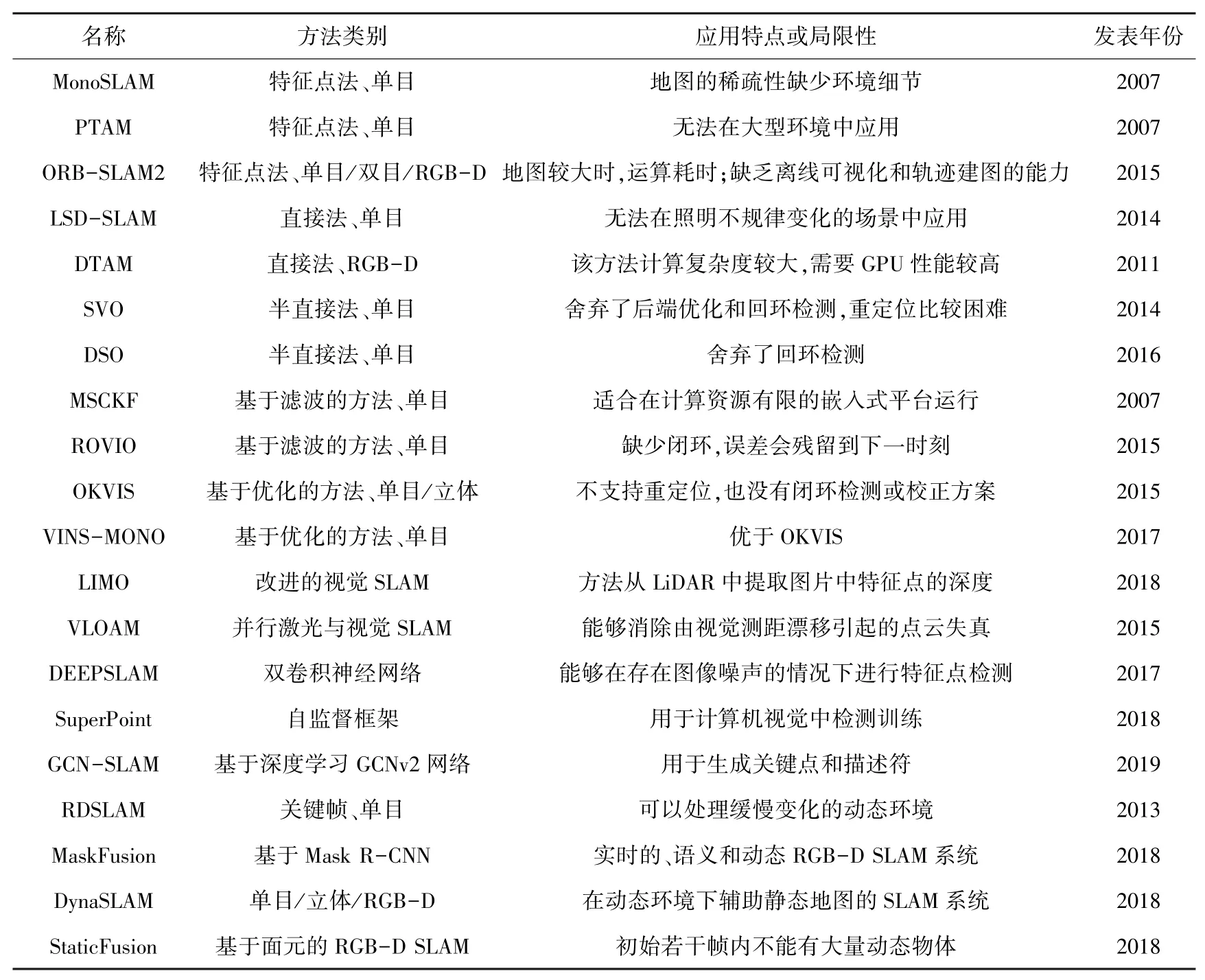
表1 视觉SLAM经典方法总结Tab.1 Summary of classical visual SLAM
综上所述,目前已有的SLAM方法仍然在计算力问题、室外动态大规模地图构建、地图复用等方面存在不足,以及在实时性与准确性问题上难以兼顾。目前,SLAM应用场景不断变化,移动环境场景也不断增多,SLAM算法在动态物体及动态环境方面要求也不断升高,同时实时性要求也随之提高,这也成为今后SLAM算法的研究方向,随着新型传感器以及更多算法的研究与发展,视觉SLAM也不断提高精度及鲁棒性,平衡实时性和准确性,向可移植、多传感器融合以及智能语义SLAM的方向发展。
