基于平行四边形机构的油机提升装置设计
2022-07-13胡志坚赵柏程
胡志坚 赵柏程

摘 要:为了提高猛士车柴油发电机组(以下简称“油机”)上下车的便利性,设计了基于平行四边形机构的油机提升装置设计,该装置采用平行四边形四杆机构运动原理,对油机提升过程进行运动分析,得出最大受力工况,利用力矩平衡原理计算驱动装置力矩及功率,分析了关键零部件的受力情况并对其进行了有限元强度校核,分析结果显示各项性能指标满足技术指标要求。
关键词:油机、提升装置、平行四边形、轻量化
一、引言
目前轻高机底盘电力来源主要有发动机取力发电、车载油机发电、外接市电三种形式,根据不同的任务需求通常采取多种取电方式并存,野外特种作业等专用车往往采用车载油机发电,发电机下车工作,发电机噪声和振动不会传导到车体上,对在车厢内工作的人员几乎无影响,且下车后使用维护非常便利,但是大功率发电机自身重量较重,上下车需要人工搬运比较费劲,为了提高油机上下车的便利性,提高整车的装载量,设计了一种轻高机猛士底盘的轻量化油机提升装置。
二、提升装置技术指标
基于平行四边形机构设计的油机提升装置主要技术指标如下。
1)提升高度:980mm;
2)提升/撤收时间:1min;
3)提升重量:120Kg;
4)设备自重:75Kg;
5)提升到位后能够可靠锁定与解锁。
设计油机提升装置时要充分考虑可靠性、人机工程学,在满足功能技术指标动的前提下,还要使其结构紧凑、美观、轻巧。
三、提升装置工作原理简介
油机提升装置通过普通减速电机驱动高力矩涡轮蜗杆减速机带动主动臂旋转实现吊篮从车上运动到地面,以及从地面运动到车上,提升装置利用涡轮蜗杆的自锁性可在提升过程任意位置停止并锁定,在初始状态下,油机安裝在吊篮上,吊篮通过可调高度的橡胶缓冲柱限位,在电磁铁磁力作用下限制吊篮在X、Y、Z三个坐标轴方向的运动,能够有效抵御运输颠簸,电磁铁通电后磁力消失,开启电机可通过执行装置翻转到地面工作。执行装置可简化为一个四杆机构,其中AB杆为机架,AC杆为主动摇杆,BD杆为从动摇杆,CD杆为连杆,如下图所示。
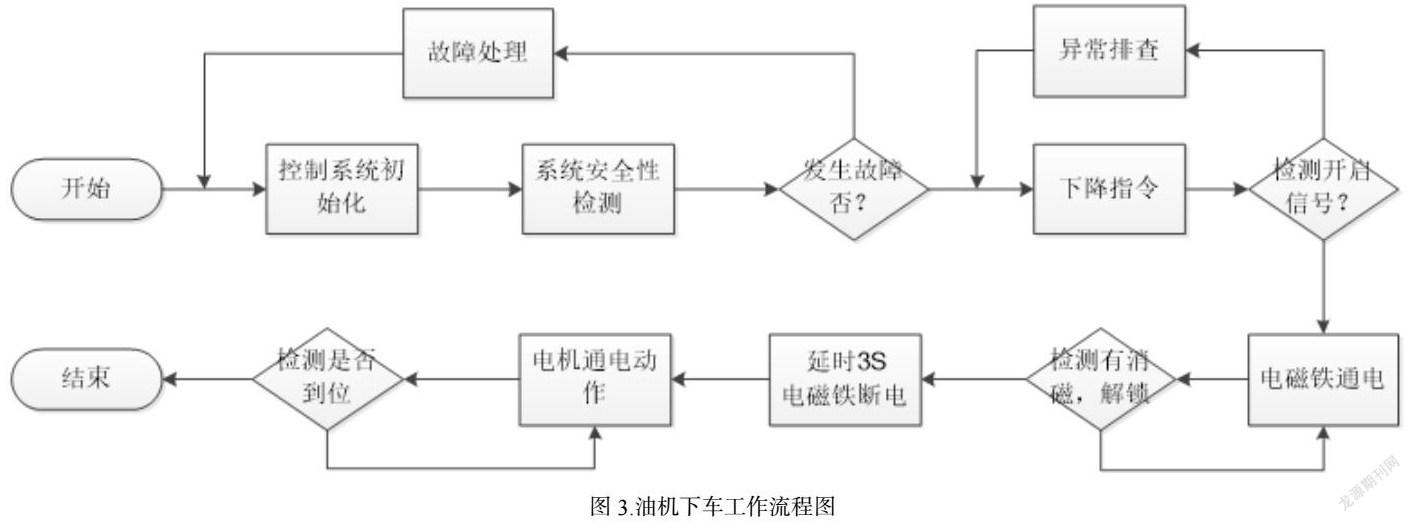
油机上车过程为下车过程的逆过程,油机的下车工作流程如下图所示:
四、结构组成
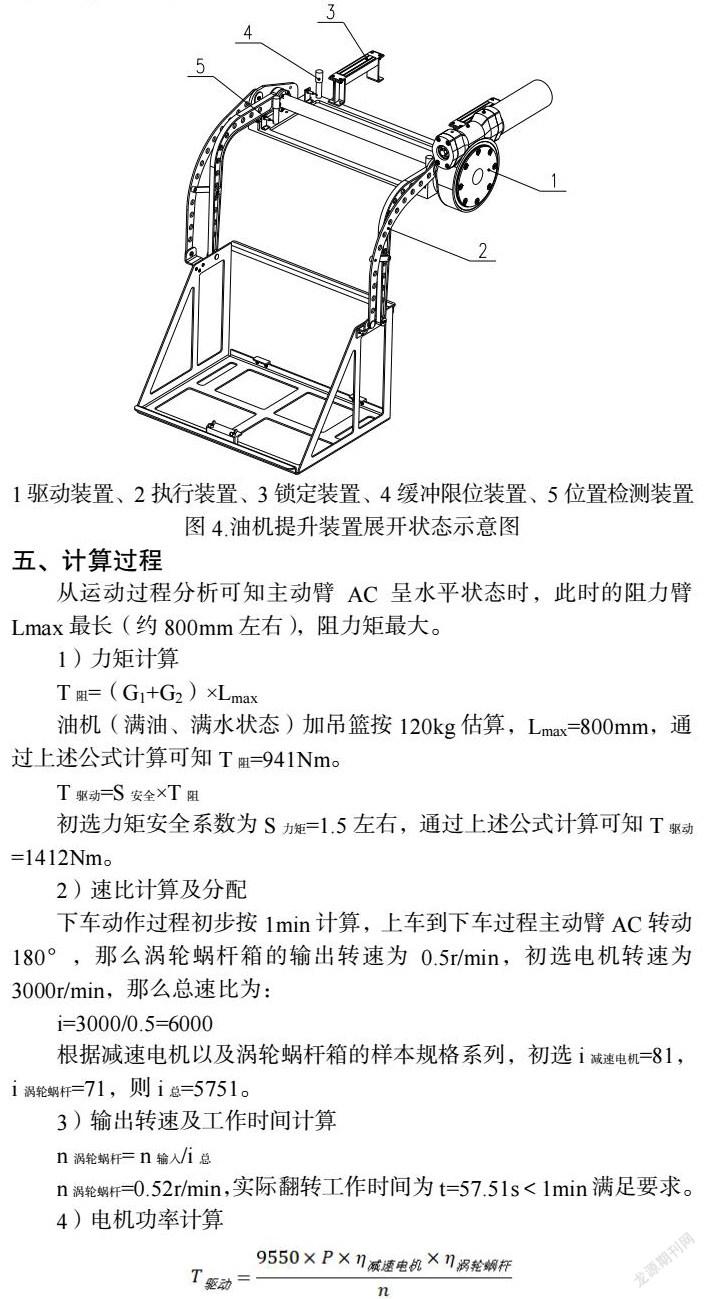
油机提升装置包含驱动装置、执行装置、锁定装置、缓冲限位装置、位置检测装置、控制箱等部件组成。其中驱动装置主要包含电机、高力矩涡轮蜗杆减速机,执行装置主要包含固定基座、主动臂、从动臂、吊篮、轴套、销轴等组成,锁定装置主要由断电保持型电磁铁、安装座等组成,缓冲限位装置主要由可调螺柱、橡胶柱等组成,位置检测装置主要由光电接近开关、安装座等组成,如下图所示。
五、计算过程
从运动过程分析可知主动臂AC呈水平状态时,此时的阻力臂Lmax最长(约800mm左右),阻力矩最大。
1)力矩计算
T阻=(G1+G2)×Lmax
油机(满油、满水状态)加吊篮按120kg估算,Lmax=800mm,通过上述公式计算可知T阻=941Nm。
T驱动=S安全×T阻
初选力矩安全系数为S力矩=1.5左右,通过上述公式计算可知T驱动=1412Nm。
2)速比计算及分配
下车动作过程初步按1min计算,上车到下车过程主动臂AC转动180°,那么涡轮蜗杆箱的输出转速为0.5r/min,初选电机转速为3000r/min,那么总速比为:
i=3000/0.5=6000
根据减速电机以及涡轮蜗杆箱的样本规格系列,初选i减速电机=81,i涡轮蜗杆=71,则i总=5751。
3)输出转速及工作时间计算
n涡轮蜗杆= n输入/i总
n涡轮蜗杆=0.52r/min,实际翻转工作时间为t=57.51s<1min满足要求。
4)电机功率计算
根据减速电机、涡轮蜗杆选型样本可知η减速电机=0.8,η涡轮蜗杆=0.4,代入公式计算可知P=240W,根据减速电机样本规格系列初选电机功率为350W,电机功率有充足的安全裕量。
六、有限元分析
随着军工装备的改革深化,各军种对装备的轻量化要求也越来越高。装备轻量化设计,减轻自重,使车辆具有较高的装载余量,该油机提升装置为了减小安装尺寸,提高电机作业效率,吊篮、主动臂、从动臂根据受力情况采用镂空、加减重孔等设计思路,通过Ansys workbench有限元仿真分析验证设计目的。
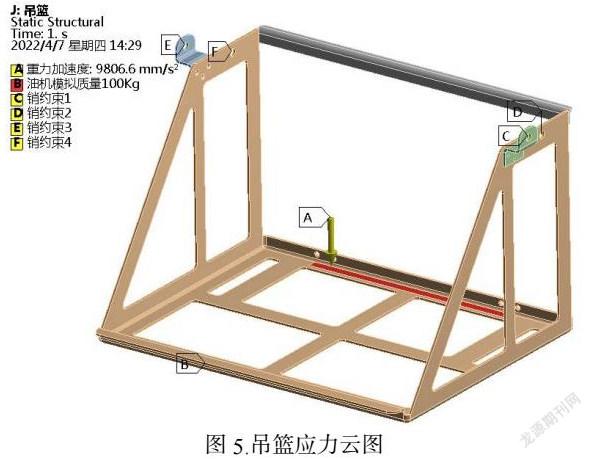
吊篮材质为Q355,吊篮的上端左右两处安装孔采用固定约束,在吊篮底部加均布载荷100kg,力的方向垂直于底面竖直向下,网格采用四面体单元划分,网格尺寸为2mm,网格节点450265个,单元个数241447个,吊篮边界条件、应力云图如下图所示。
主动臂材质为Q355,屈服强度[σs]=355Mpa,主动臂的输入端螺纹孔采用固定约束,通过Ansys软件反求吊篮销轴上的反作用力大小与方向,在输出端圆柱面加载938.13N,网格采用四面体单元划分,网格尺寸为2mm,网格节点139138个,单元个数77171个,主动臂边界条件、应力云图。
根据有限元分析结果可知,吊篮最大应力151.74Mpa,S2=355/ 151.74=2.3,主动臂最大应力为39.5MPa,安全系数S1=355/39.5=8.9,从动臂最大应力为283.8MPa,安全系数S1=690/283.8=2.4,在一系列减重措施的情况下,吊篮、主动臂、从动臂应力均小于屈服强度,满足可靠性要求。
七、结论
通过设计计算、仿真分析、实物验证可知采用电机驱动高力矩涡轮蜗杆减速机带动一个平行四边形四杆机构旋转实现油机随吊篮上下车,该装置工作机理清晰、可靠性高、体积小、重量轻,设计满足实际需求。
参考文献
[1]刘建坤,南江红,王光辉,翁艺航,黄佳雷.基于平行四边形机构的天线举升装置设计.机械设计与制造工程,2021年5月,第50卷第5期.
[2]张鹏飞,许俊龙,黄春明,林戈.一种单自由度双平行四边形机构研究.机械设计与制造,2017年2月
