针对输电线路周边工程机械的防撞在线预警方法
2022-07-12陈超杰谢伟何林巍田强贺润平王哲斐
陈超杰,谢伟,何林巍,田强,贺润平,王哲斐
(1. 国网上海市电力公司青浦供电公司,上海 201799;2. 上海四量电子科技有限公司,上海 201415)
0 引言
随着各类传感器以及人工智能算法的不断发展,电力设备状态监测的方式也实现了高度的自动化与智能化[1]。在众多状态监测方式中,在线监测方法是最为有效的方式之一,其不仅能够反映电力设备的运行状态,同时具备较高的实时性,可以起到设备异常预警的功能,方便工作人员提前发现设备缺陷。目前,在线监测方法已经在变电、配电领域大规模应用,效果显著[2]。
输电环节作为电力传输过程中距离最远、电压等级最高、环境最为复杂的部分,一直以来饱受各类安全威胁的困扰[3-6]。据统计,在引发输电线路跳闸因素中,主要包括极端天气、高大树木、违章施工等,其中,人为的外力撞击占比达到近四分之一[7-8]。在人为外力撞击事件中,近80%是大型工程机械违章施工导致的,并且往往会产生永久故障点,不仅对电网安全稳定运行产生严重威胁,而且对施工人员的人身安全危害极大[9-10]。因此,对输电线路采取防撞预警措施是非常必要的。
一直以来,智能化的在线监测方法在输电领域的应用一直较为薄弱。目前,输电线路的防撞主要依靠人工现场巡线、人工后台视频监控等方式,均需要耗费较多的人力资源,并且监测覆盖面较为有限[11]。目前已有多种关于输电线路防撞在线预警的方法有多位学者提出了相关方案,如通过激光技术、红外检测技术等监测输电线路周围异物的存在,但受环境影响较大,容易产生误判[12];通过视频监控设备获取异物图像并分析进行结果研判,但单一使用图像数据,其识别精度有待提升[13-15]。
本文针对输电线路防撞工作的现状,提出了针对输电线路周边工程机械的防撞在线预警方法。该方法通过微波测距传感模块、摄像模块等对被监测区域进行实时监测,当监测到运动目标时,即提取该目标的像素分布特征、形状特征以及距离特征,并传输到后台服务器。后台服务器接收到数据后,即通过特征数据库以及模式识别算法对目标的特征数据进行识别,进而输出识别结果。
本文的创新点在于, 使用压缩感知(compressed sensing,CS)算法实现异物目标的高精度自动在线监测与识别。CS 算法指出,对于一个具有稀疏性的信号,可以降频采集并完整重构。本文的识别结果数据具有较高的稀疏性,因此选用CS 算法完成模式识别环节,保证识别结果的高精度[16-17]。结果表明,本文提出的防撞在线预警方法,对于异物预警研判的准确率可达96.34%,验证了其有效性。
1 系统概述
本文提出的针对输电线路周边工程机械的防撞在线预警方法,在结构上主要分为两个部分:前端监测模块和后台处理模块,系统结构如图1 所示。
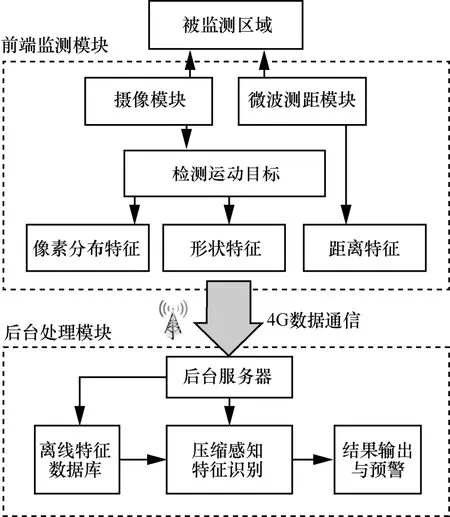
图1 系统结构
前端监测模块包括监测传感器、处理器以及通信模块。监测传感器包含摄像模块以及微波测距模块,分别进行异物的图像以及与线路距离数据的采集。当前端处理器利用采集的被监测区域的图像数据,通过运动物体检测算法识别出被监测区域存在运动物体时,即通过该图像提取异物的像素分布特征数据以及形状特征数据,并记录此时的测距数据,一起通过4G 通信模块传输至后台服务器。
后台处理模块包括后台服务器以及预警模块。后台服务器接收到异物的特征数据时,即调取离线特征数据库以及建模完成的压缩感知识别算法,对异物是否具有威胁进行研判,并根据结果输出预警结果,通过预警模块执行相应的处理流程。
离线特征数据库中为历史上采集的异物目标特征数据,其数据结构与前端处理器采集的特征数据一致,并且包含异物的研判结果。每一次的识别均可对离线特征数据库进行数据更新与学习,增强算法的识别能力。
2 识别目标特征量提取
异物目标特征量的有效提取是目标精确模式识别的基础,也是能否对撞击威胁进行有效预警的关键。但系统检测到监测范围内存在运动物体时,即对该物体进行抓取,并提取其3 种特征:像素分布特征、形状特征以及距离特征,为模式识别环节提供数据基础。
2.1 运动目标检测
为节约系统软、硬件资源,使特征量过程更为精确,系统利用摄像模块进行监测范围内运动目标的检测。
本文利用帧差法实现运动目标检测,即对比连续两帧图像的像素值差异,若差异像素点个数大于设定好的阈值,则认为在这一时刻图像中有物体在运动,并且变化像素点的集合即运动物体的像素点集合。这样便完成了运动目标检测,同时也输出了运动物体的像素点集合,后续的特征量提取也是在该集合范围内进行的。
2.2 像素分布特征提取
据输电运检单位统计,造成输电线路撞击事故的大型施工机械以大型吊车为主,其中,95%的吊车涂装颜色为黄色或绿色。因此,本文抓住目标的颜色特征,将目标像素分布特征作为主要特征量之一。
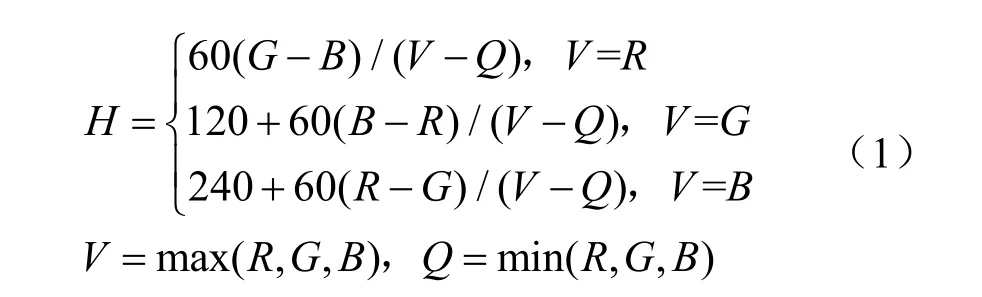
图像中的颜色通常由红、绿、蓝(RGB)三基色像素描述,每一种基色取值范围为0~255。为了用一个值表征像素的颜色特征,本文将像素由RGB 空间转换为HSV(hue、saturation、value)空间,即色调、饱和度、强度,取其中的色调(H)。RGB 与H值之间的转换式如(1)式所示。
通过式(1)的转换,每一个像素点均对应一个H值。由此可以绘制出像素点分布特征图。以图2中抓取的吊车为例,像素分布特征图如图3 所示。

图2 目标形状特征提取示意图
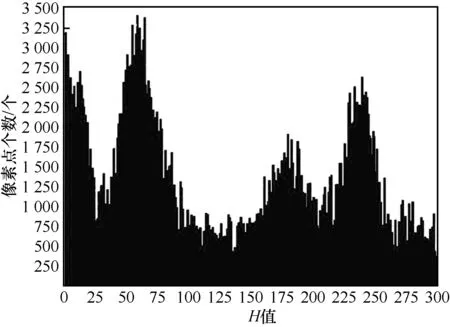
图3 像素分布特征图
为更好地表征像素分布特征,并且使得像素总数不同的图像之间有可比性,本文对像素点个数进行归一化处理,即每一个H值对应的像素点个数均除以像素点个数最大值。
2.3 形状特征提取
对于吊车等大型机械,其形状特征显著区别于其他运动物体。因此,本文将目标的形状特征也作为主要特征量之一。
形状特征的提取首先要绘制出目标的最小矩形外框。将运动目标像素集合中的像素点进行欧氏距离计算,将遍历结果中最大值对应的两个像素点设为对角线端点,以此为基础绘制最小矩形外框。然后,对矩形的长宽比进行计算,即可得到运动目标的形状特征数据。
2.4 距离特征提取
若监测范围内出现的大型机械与输电线路之间的距离处于安全范围,此时针对该目标发出防撞预警就会造成威胁处置资源的浪费。因此,本文将目标的距离特征作为主要特征量之一。
距离特征的获取通过成熟的微波测距模块实现,输出的值即目标与输电线路之间的距离值。
3 基于压缩感知的目标特征识别
本文算法在进行目标特征识别时,是识别离线特征目标数据库中与本次目标最为相似的目标,包括以下两种情况。
· 识别出的目标类型为无威胁,那么本次目标特征识别的结果为无威胁,无须工作人员对其进行确认与处理。
· 识别出的目标类型为有威胁,则对目标的相似度设置阈值进行二次判断,若超过阈值则本次目标特征识别结果为威胁,需要工作人员进行处理,否则判定无威胁。
以上为本文目标特征识别算法整体逻辑架构。其中,最为核心的部分是离线特征目标数据库的识别,此步骤的精度直接影响最终结果的判断。压缩感知(CS)理论指出,若信号可以满足稀疏性要求,则利用低于奈奎斯特采样频率采集的部分数据,恢复信号的完整数据。本文将CS算法进行重新设计,利用其重构数据的功能实现目标特征的高精度识别。
3.1 CS 算法设计
对于一次目标识别过程,系统需要采集由形状特征、距离特征以及像素分布特征所构成的302 维特征向量,如式(2)所示。

其中,第j个元素为1。
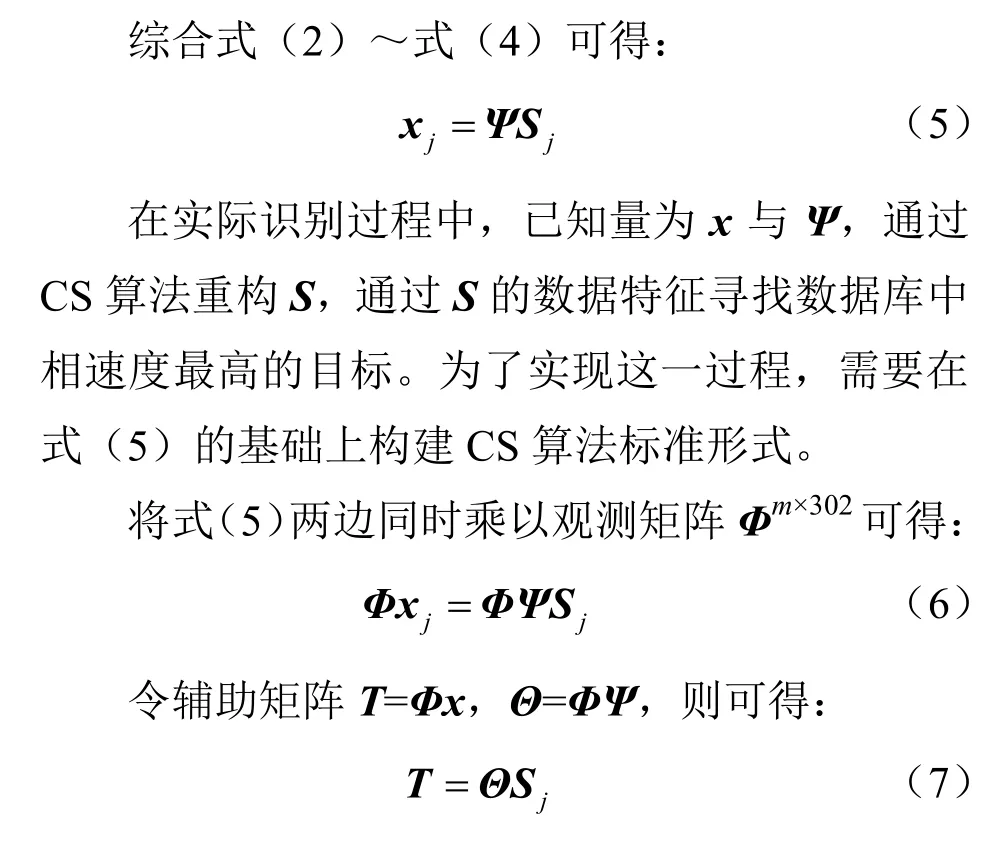
其中,Θ称作传感矩阵,维度为m×N。为体现CS算法的压缩性,m远小于302。
式(7)即CS 算法的标准形式。已知T与Θ,即可重构S。但是,高精度的重构需要对Θ矩阵进行特殊的处理与构建。
3.2 基于奇异值分解的传感矩阵构建
根据CS 算法原理,高精度的数据重构需要Θ矩阵满足限制等距性质(restricted isometry property,RIP)[18],即满足:
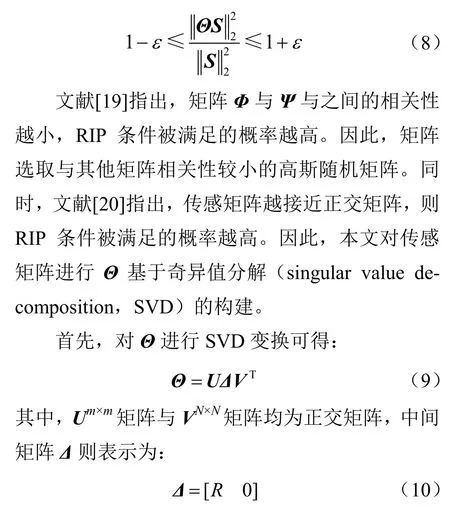

F为变换后的传感矩阵,由式(17)可得,F是一个部分正交矩阵,因此可以满足RIP 条件。
综上所述,利用检测得到的x、高斯随机矩阵Φ、离线数据库Ψ,即可根据式(18)重构特征数据提取向量S。
3.3 识别目标优化重构
如上文所述,式(18)是一个欠定方程,因此无法直接解方程。由于被重构向量S是稀疏度为1 的向量,本文将重构问题转化为最小l1范数优化求解问题[21],求解模型为:

优化求解过程通过多次迭代逐步逼近原数据向量的原理,常用求解算法主要包括正交匹配追踪(orthogonal matching pursuit,OMP)算法[22]、子空间追踪(subspace pursuit,SP)算法[23]压缩采样匹配追踪(compression sampling matching pursuit,CoSaMP)算法[24]以及广义正交匹配追踪(generalized orthogonal matching pursuit,GOMP)算法[25]等。本文使用这4 种求解算法以进行对比。
重构得到的向量S可计为S′:

重构的过程存在误差,因此 ′S稀疏度并不是1,而是由一个接近1 的值加上若干较小非0 值组成的向量。本文选取向量中最大值对应的元素位置选择数据库中最相似向量,并用该值与1 之间相似度作为目标之间的相似度。
4 实验验证
4.1 实验设置
为了验证本文防撞在线预警方法的有效性,首先建立识别使用的离线特征数据库以及用以验证算法的测试数据库。通过现场采集以及历史留存样本的处理,共建立了包含976 个样本的离线特征数据库以及包含273 个样本的测试数据库。数据库中包含多种机械设备在多种环境下的样本,可以涵盖大多数的输电线路大型机械撞击事故的类型。实验样本图像示例如图4 所示。
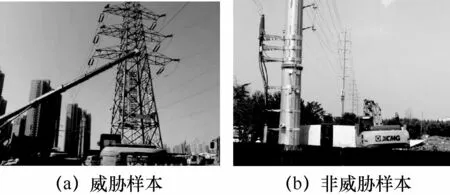
图4 实验样本图像示例
在测试数据库的273 个样本中,具有威胁的样本共有76 个,无威胁的样本共197 个。
4.2 运动目标检测有效性验证
本文在现场进行了运动目标图像采集,然后利用本文运动目标检测算法生成各运动目标像素集合。为了检验算法有效性,同步对运动目标图像进行人工框取,生成检验集合,将其与运动目标像素集合进行像素相似度对比,不同类型运动目标检测准确率见表1。
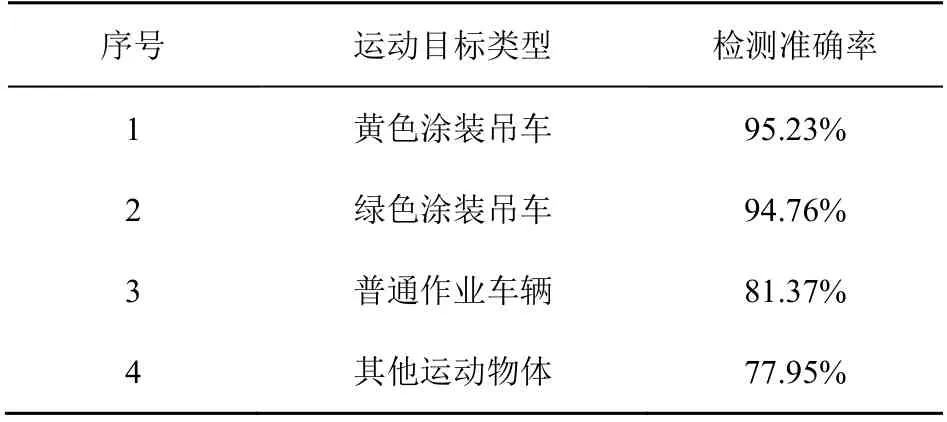
表1 不同类型运动目标检测准确率
从表1 可以看出,本文运动目标检测算法对于大型吊车的检测准确率可达95%左右,这是因为吊车吊臂高度较高,因此该部分的背景图像较为单一,帧差法检测效率更高。
4.3 压缩感知目标特征识别结果及分析
从第2 节算法策略的描述可得出,压缩感知算法直接输出的是相似度值,最终结果的判定需要相似度值与设定的阈值进行对比。因此,不同的阈值对算法输出结果的准确性影响是较为显著的。因此,本文在测试时针对不同阈值下的识别准确度进行统计。为了验证本文CS 算法的有效性,在测试中选取了BP(back propagation)神经网络以及K-近邻(K-nearest neighbor,KNN)两种模式识别算法,用以进行对比验证。识别测试结果如图5 所示。
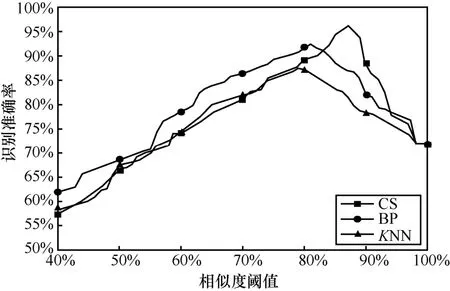
图5 识别测试结果
从图5 可以看出,3 种算法识别准确率的变化趋势均是随着阈值的增加先升后降的。CS、BP、KNN 3 种算法达到准确率最大值的阈值分别为86%、80%、78%,对应的识别准确率分别为96.34%、91.94%、87.55%。
由以上结果可以看出,本文CS 算法的识别效果是具有一定优势的,其不仅有最大的准确率,同时对应的阈值也是最大的。这说明CS 算法在识别目标时,均能够输出较高的相似度值,那么当阈值变低时,就会使得“误判”的情况变多,而当阈值变高时,并不会造成过多“漏判”。因此,CS 算法具有最高的鲁棒性。
为了探究CS 算法中重构优化求解算法的选取对算法识别准确度的影响,本文选取OMP、SP、CoSaMP、GOMP 4 种求解算法进行对比验证。相似度阈值选取86%,测试各算法在不同m值下的十倍准确率,4 种求解算法准确率对比如图6 所示。
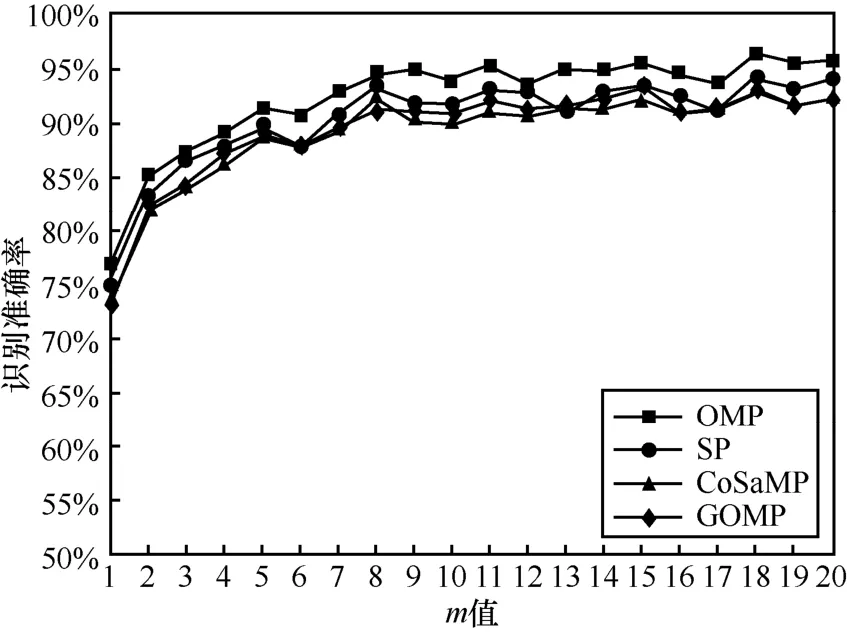
图6 4 种求解算法准确率对比
从图6 可以看出,当m<5 时,识别准确率较低,当m>10 后,识别准确率区域稳定值。OMP 算法的识别准确率显著高于其他3 种求解算法,因此本文CS 算法中的求解算法选取OMP算法。
4.4 针对不同工程机械样本的识别结果及分析
为探究本文算法对于不同类型工程机械的识别性能,使用317 个黄色涂装吊车样本、265 个绿色涂装吊车样本以及283 个其他工程机械样本,对本文算法进行测试,不同类型样本识别准确率如图7 所示。
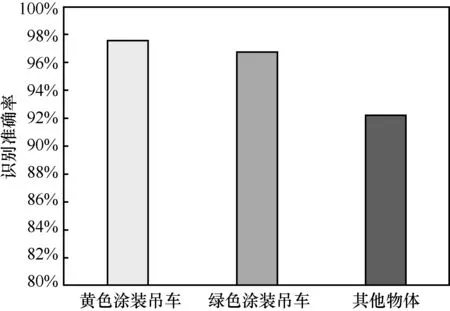
图7 不同类型样本识别准确率
从图7 可以得到,黄色涂装吊车、绿色涂装吊车以及其他物体的识别准确率分别达到了97.56%、96.77%、92.17%,说明本文算法对于大型吊车的识别准确率较高,这是因为在3 个特征量中,H值分布向量、最小矩形长宽可以直接反映大型机械的颜色特点和形状特点。因此,本文算法在实际应用中的识别作用是较为可靠的。
5 结束语
本文针对输电线工程机械路防撞问题,提出了针对输电线路周边工程机械的防撞在线预警方法。该方法利用摄像机、微波传感器对监测范围内的运动目标进行特征量提取,包括像素分布特征、形状特征以及距离特征,然后利用压缩感知算法对目标进行研判,输出预警结果。通过本文设计的实验,可以得到以下几个结论。
(1)本文算法在设计上主要针对大型的施工机械进行识别,识别精度可以达到96.34%,有效保证了输出的预警信息可靠性,为运检部门及时做出相应处置措施、提前消除隐患建立了基础。
(2)本文使用的压缩感知算法识别准确率显著高于其他模式识别算法,并且具有最高的鲁棒性,算法性能优异。
(3)在输电线路的外力撞击事故中,近80%来源于大型施工机械,这正是本文算法主要针对的识别类型。因此,本算法在输电线路运检工作中具有较好的可推广性。
