一种BDS/GPS/GLONASS融合精密单点定位方法
2022-07-12翟建勇李路程麻军伟
田 宇,翟建勇,李路程,麻军伟
一种BDS/GPS/GLONASS融合精密单点定位方法
田 宇,翟建勇,李路程,麻军伟
(中国电子科技集团公司第二十研究所,西安 710068)
给出了一种基于BDS/GPS/GLONASS融合的精密单点定位方法,统一了三系统组合精密定位的时间系统和空间系统,建立了精密单点定位非差组合模型,并利用观测数据进行了精密单点定位解算。计算结果表明,相比单一系统而言,三系统组合有效缩短定位收敛时间以及提高在单系统卫星数较少或者卫星星座分布较差时的定位精度,无论是从连续性、可用性、可靠性、精度以及效率等各方面都更具优势。
精密单点定位;定位精度;收敛时间
0 引言
在传统GPS静态定位中,绝对定位的精度在20 m左右,满足不了精密导航和测量用户的需求,一般都采用相对定位方式,通过组成双差观测值消除接收机钟差、卫星钟差等公共误差及削弱对流层延迟、电离层延迟等相关性强的误差影响,来达到提高精度的目的。这种观测方式无需考虑复杂的误差模型,具有解算模型简单、定位精度高等优势;但也存在一些不足,如观测时至少有一台接收机置于已知站上,影响了作业效率,提高了作业成本。精密单点定位技术与单点定位相比,其静态定位精度可达到厘米级,定位精度高[1-2];与实时动态(Real-Time Kinematic,RTK)载波相位差分技术相比,无需与其他组配或架设基准站,只需要单机作业,从而节约成本,且提高工作效率,同时不受距离约束,数据解算可快速完成,数据处理更加简单;其厘米级的定位结果又可以满足一般导航和测量用户的需求,因此,在测量的各领域有广泛的应用前景。当前的精密单点定位技术的实现主要是基于GPS观测数据[3-4]。但GPS作为一种基于卫星的定位技术,系统的可用性、定位结果的可靠性和精度很大程度上取决于观测到的卫星的数量。随着北斗卫星导航系统(BeiDou Navigation Satellite System,BDS)于2012年底正式提供亚太地区区域性服务,BDS加入全球导航卫星系统(Global Navigation Satellite System,GNSS)行列,研究BDS与其他系统之间的组合定位尤为重要,特别是在单系统受所处环境影响导致可视卫星颗数较少时,组合系统能够有效地提高单系统的定位精度。利用多系统融合,可以增加观测卫星数,有助于提高定位精度,增加恶劣环境下的可用性。BDS/GPS/ GLONASS在可用性、连续性和完好性方面的保障远比单一系统好,研究利用BDS/GPS/GLONASS观测数据进行精密单点定位,将使可视卫星数比单一GPS系统大大增加。首先,将有助于提高精密定位的精度;其次,将有效地解决在城市、山区等遮挡严重的地方,观测GPS卫星数少于4颗,导航定位无法实现的问题,弥补了单一GPS系统卫星数目不足的问题;最后,将有效地降低用户对某一系统的依赖性,解决单一系统导航定位安全性不足的问题[5]。
1 总体框架设计
本文提出的BDS/GPS/GLONASS融合精密单点定位方法,在双系统的基础上统一了三系统组合精密定位的时间系统和空间系统,建立了精密单点定位非差组合模型。如图1所示,本文提出的BDS/GPS/GLONASS融合精密单点定位方法分为五个模块:
1)读取原始数据
原始数据包括BDS、GPS、GLONASS三系统Rinex格式原始观测数据、广播星历,精密星历和精密钟差。
2)数据预处理
对BDS、GPS、GLONASS三系统原始数据采用Melbourne-Wubeena组合探测法进行周跳检测及粗差剔除。用检测过周跳的载波相位来平滑剔除粗差的伪距,对BDS、GPS、GLONASS三系统时空基准进行统一处理。
3)建立精密单点定位模型
通过拉格朗日插值方法内插精密星历、钟差,构建BDS、GPS、GLONASS三系统观测方程,采用双频伪距和载波相位观测值的消电离层组合方法进行误差改正。
4)建立随机模型
对于同一系统的不同卫星,基于高度角的先验定权方法,对于不同系统下的卫星,采用的是Helmert验后方差估计的方法来进行定权。
5)解算结果
采用扩展卡尔曼滤波(Extended Kalman Filter,EKF)进行模糊度和坐标求解。

图1 BDS/GPS/GLONASS融合精密单点定位方法框架
2 时空基准统一
2.1 时间基准统一


2.2 坐标基准统一
GPS坐标系统采用的是WGS-84坐标系。该坐标系是地心空间直角坐标系,它的原点为地球质心,轴指向国际时间服务机构(Bureau Internatioal de I’Heure,BIH)1984.0定义的协议地球极(Conventional Terrestrial Pole,CTP)方向,轴指向BIH 1984.0的零子午面和CTP赤道的交点,轴与轴、轴垂直构成右手坐标系。BDS坐标系统采用的是我国2000大地坐标系统(China Geodetic Coordinate System 2000,CGCS 2000),它的定义和国际地球参考系统(International Terrestrial Reference System,ITRS)相一致。GLONASS的前苏联1985标系(The Soviet Union Geodetic System-1985 Coordinate System,SGS 85),1993年以后改为使用PZ 90.02坐标系,该坐标系是由俄罗斯进行地面网与空间网联合平差后所建立的。
GPS与BDS两个坐标系的主要不同在于参考椭球的扁率有微小的差异,而这种差异在当前的测量精度水平中可以忽略,对于在坐标系定义上的比较,可以认为在同一历元下CGCS 2000和WGS-84在坐标系的实现精度范围内,两者的坐标是一致的。当前,大多数学者认为使用俄罗斯任务控制中心(Mission Control Center,MCC)计算得到的七参数作为两个坐标系转换参数的精度最高,该七参数是通过全球激光跟踪测轨数据计算得到,PZ 90.02与WGS-84之间的坐标转换公式如式(3)所示:


3 定位模型
利用拉格朗日插值法内插精密星历和钟差,采用非差模型进行高精度单点定位,建立精密单点定位的误差方程如式(5)~式(10)所示:












进行定位解算时,必须对伪距测量值进行电离层、相对论效应等误差改正,从而消除绝大部分伪距测量值和载波相位观测值的误差,但有部分误差有所残留,鉴于不同系统的不同伪距误差,就有必要对每颗卫星的权值进行设定。对于同一系统的不同卫星,基于高度角的先验定权方法,对于不同系统下的卫星,采用的是Helmert验后方差估计的方法来进行定权。观测值的精度可以通过高度角来间接反映。当出现卫星高度角偏低的情况,电离层、对流层、多路径等误差对观测值出现比较大的影响,这就会出现精度降低的情况,所以必须适当地提高卫星高度角。以卫星高度角定权的一种随机模型形式如式(17)所示:
1)GPS:
2)GLONASS:
3)BDS:
三系统融合定位中,观测方程为非线性,采用EKF进行模糊度和坐标积累,快速收敛。构造方程如式(18)~式(22)所示:
系统方程:

测量方程:

系统预测方程:

系统预测方程协方差:

增益方程:

当观测方程经过线性化后,状态量与其相关系数矩阵的时间更新如式(23)所示:
4 数据处理分析
定位结果如图2~图4所示,融合定位系统收敛时间相比单系统收敛时间有所减少,这对于改善单系统精密单点定位需要长时间收敛时间具有重要意义。融合系统的定位精度比单系统的定位精度提高,能够有效地提高单系统的可视卫星颗数,改善组合系统的空间卫星分布。特别是在环境恶劣情况下,单系统卫星颗数较少时,融合定位系统能够发挥明显优势。利用西安全天原始观测数据进行计算,全天时间中GPS平均可视卫星颗数5.7颗;BDS平均可视卫星数6.3颗;GLONASS平均可视卫星数5.0颗;三系统融合定位的平均可视卫星颗数最高,达到17颗。

图2 定位结果X分量误差示意图
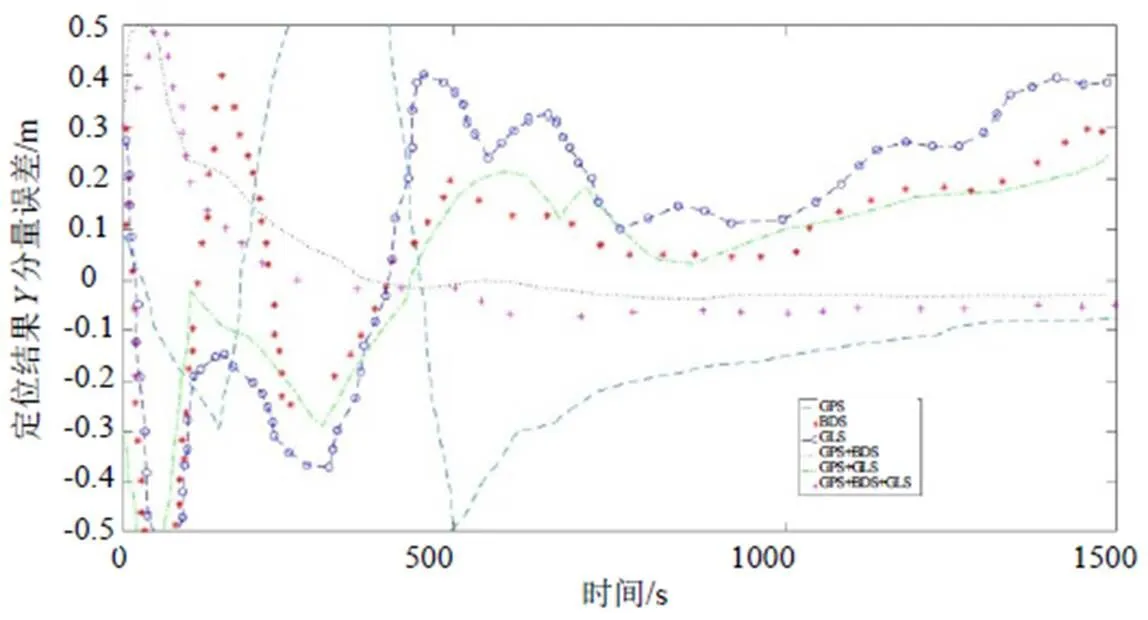
图3 定位结果Y分量误差示意图
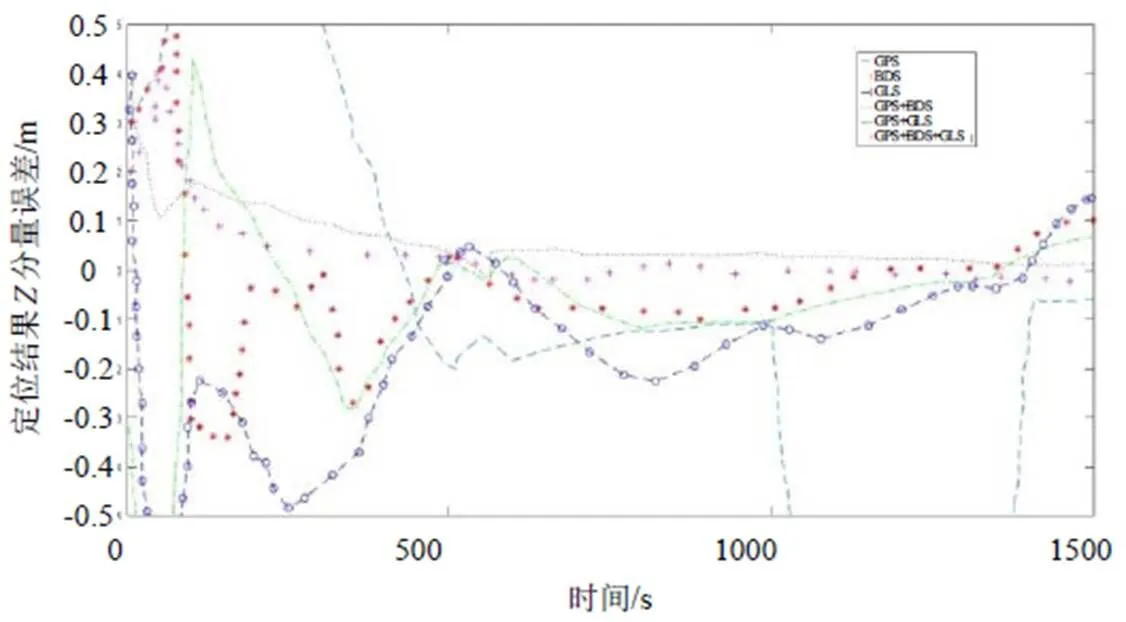
图4 定位结果Z分量误差示意图
5 总结
本方法统一了三系统组合精密定位的时间系统和空间系统,建立了精密单点定位非差组合模型,有效缩短定位收敛时间以及提高在单系统卫星数较少或者卫星星座分布较差时的定位精度。相比单一系统而言,BDS/GPS/GLONASS无论是从连续性、可用性、可靠性、精度以及效率等各方面都更具优势。BDS/GPS/GLONASS作为三个完全独立的全球卫星导航定位系统,三者的融合可以大大改善卫星的几何图形强度,能显著提高定位系统的自主完备性和精度。
[1] Zumberge J F, Heflin M B, Jefferson D C, et al. Precise point positioning for the efficient and robust analysis of GPS data from large networks[J]. Journal of Geophysical Research, 1997, 102(B3): 5005-5017.
[2] Píriz R, Calle D, Mozo A, et al .Orbits and Clocks for GLONASS Precise-Point-Positioning[C]. ION GNSS, Savannah, GA, 2009.
[3] Bruyninx C. Comparing GPS-only with GPS +GLONASS Positioning in a Regional Permanent GNSS netwo rk[J]. GPS Solutions, 2007(11): 97-106.
[4] Li Xingxing, Zhang Xiao hong, Guo Fei. Study on Precise Point Positioning Based on Combined GPS and GLONASS[C]. ION GNSS, Savannah, GA, 2009.
[5] 易重海. 实时精密单点定位理论与应用研究[D]. 南京:中南大学,2011.
Approach to Combined BDS/GPS/GLONASS Precise Point Positioning
TIAN Yu, ZHAI Jianyong, LI Lucheng, MA Junwei
A precise single point positioning method based on the fusion of BDS/GPS/GLONASS is presented, unifies the time system and space system of three systems combined precise positioning, establishes the non difference combination model of precise single point positioning, and uses the observation data to solve the precise single point positioning. The calculation results show that compared with a single system, the combination of three systems can effectively shorten the positioning convergence time and improve the positioning accuracy when the number of satellites in a single system is small or the distribution of satellite constellations is poor. It has more advantages in terms of continuity, availability, reliability, accuracy and efficiency.
Precise Point Positioning; Positioning Accuracy; Positioning Convergence Time
TN967.1
A
1674-7976-(2022)-03-170-06
2022-03-30。
田宇(1983.07—),吉林九台人,硕士研究生,高级工程师,主要研究方向为卫星导航技术。