环境减灾二号A/B卫星高光谱成像仪设计与验证
2022-07-12孙剑陈小来刘学斌胡炳樑李思远郝雄波张宏建王爽张智南
孙剑 陈小来 刘学斌 胡炳樑 李思远 郝雄波 张宏建 王爽 张智南
(中国科学院西安光学精密机械研究所,西安 710119)
我国环境减灾卫星主要对生态环境和灾害进行大范围、全天候动态监测。环境减灾二号A/B卫星高光谱成像仪用于接替超期服役12年的环境减灾一号A卫星超光谱成像仪,通过双星同轨组网的方式,在全球目标区域内获取高光谱影像数据,用于支持我国环境监测、防灾减灾等业务工作,同时为国土资源、水利、农业、林业、地震等多个领域提供卫星数据资源支撑和应用服务。作为环境减灾二号A/B卫星上唯一可获取高光谱数据的重要载荷,高光谱成像仪可以同时获取可见光近红外(VNIR,0.45~0.92 μm)谱段和短波红外(SWIR,0.9~2.5 μm)谱段的光谱数据,相较于环境减灾一号A卫星超光谱成像仪[1]增加了SWIR谱段,幅宽由50 km增大到96 km,空间分辨率提高到48 m,使得全国覆盖时间为42天,提高了观测效率。
本文主要介绍环境减灾二号A/B卫星高光谱成像仪的工作原理、系统组成及技术特点,并给出环境试验和在轨成像数据。最终数据结果表明:高光谱成像仪设计所采用的关键技术解决了幅宽增大和空间分辨率提高带来的系列问题。
1 高光谱成像仪国内外现状及系统方案
1.1 国内外现状
高光谱成像仪从20世纪70年代开始研究应用以来,国内外已研制成功多种技术原理的仪器设备,自2000年美国地球观测-1(EO-1)卫星搭载的高光谱成像仪Hyperion成功应用以来,棱镜色散、光栅色散、滤光片型、静态干涉等不同技术体制的星载高光谱成像仪已成功在轨运行,幅宽覆盖30~150 km,分辨率覆盖30~100 m[2-8],表1列出了目前国内外在轨及在研的几个高光谱成像仪。国外近期发射的高光谱成像仪的空间分辨率多集中在30~60 m,幅宽最大为150 km(如表1中的高光谱红外成像仪HyspIRI),国内已研制成功的高光谱成像仪幅宽最大为100 km(如表1中SPARK01/02),而环境减灾二号A/B卫星高光谱成像仪在目前国内在轨的星载高光谱成像仪中属于大幅宽。

表1 在轨及在研的高光谱成像仪Table 1 Hyperspectral imagers on orbit/in research
1.2 系统方案
1.2.1 工作原理
环境减灾二号A/B卫星高光谱成像仪基于大孔径静态干涉光谱成像(LASIS)技术原理,利用卫星平台推扫获取包含2维空间信息和1维光谱信息的“数据立方体”。每次曝光获得1帧包含2维空间信息的干涉图像,同一视场的不同目标单元光程差不同,通过沿卫星飞行方向推扫,在飞行方向上(与干涉条纹垂直的方向)连续采集后,可获得同一地物目标不同光程差的干涉信息,面阵探测器将带有干涉信息的图像光信号转换成电信号,再经信号处理电路和数据压缩电路后输出至星上数传分系统,通过数传(或中继)分系统传到地面,最后经地面反演后得到3维数据立方体[9]。高光谱成像仪成像技术原理如图1所示。

图1 高光谱成像仪成像技术原理Fig.1 Principle diagram of hyperspectral imager
1.2.2 系统组成
高光谱成像仪由VNIR和SWIR这2路光谱成像系统组成,单路光谱成像系统均包含干涉仪、傅氏镜和定标系统,2路系统共用1套摆镜系统,图2为高光谱成像仪结构示意。
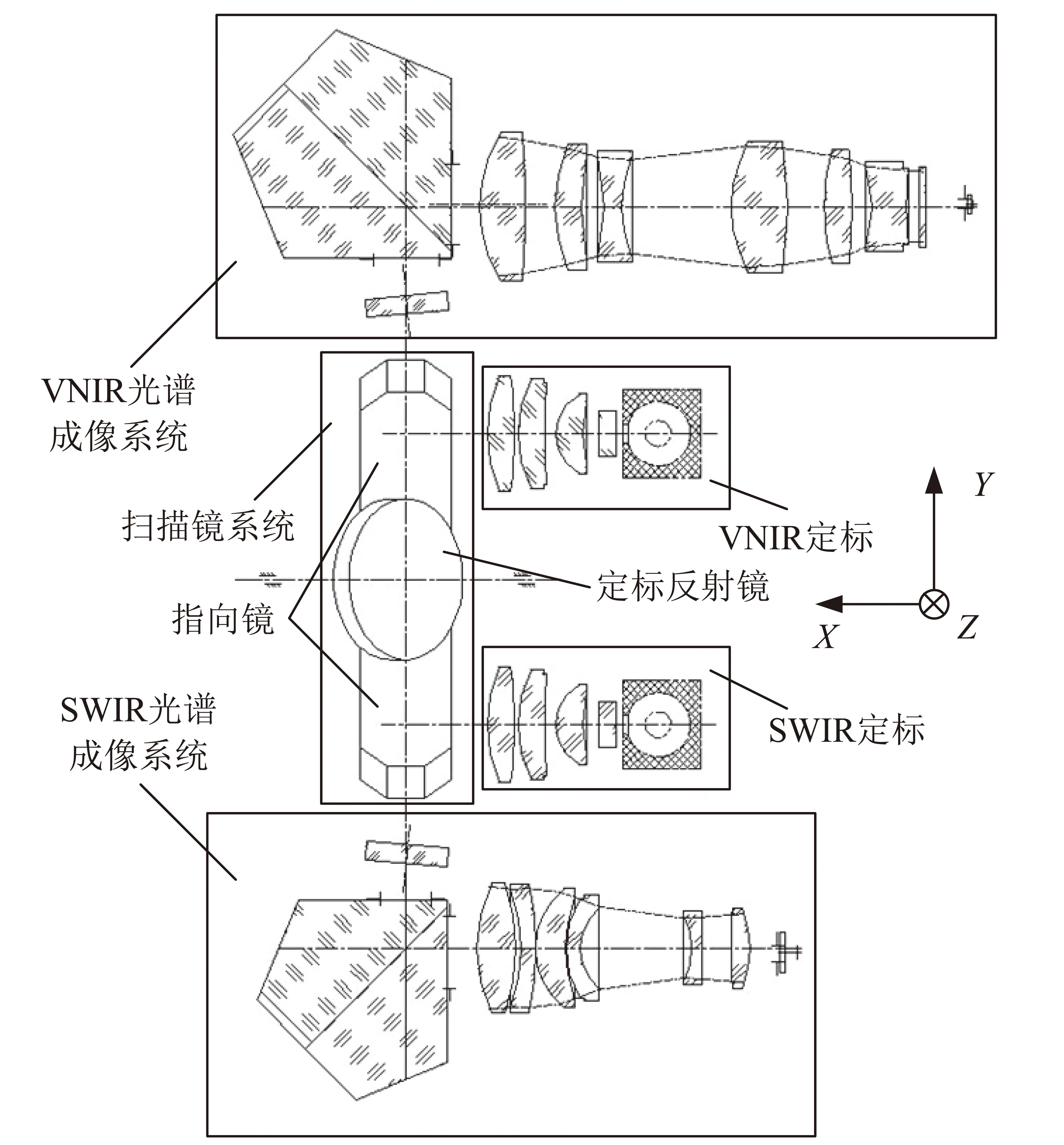
图2 高光谱成像仪结构示意Fig.2 Structure schematic of hyperspectral imager
通过2块指向镜折转光路将地面目标信息分别折转到主系统中,摆镜侧摆±15°具有穿轨指向功能,可实现700 km指向范围,96 km幅宽范围内目标的重访时间最小为4天。同时,摆镜分别转动±90°背面的定标反射镜,可将VNIR定标光源和SWIR定标光源引入到VNIR和SWIR主光学系统中,实现星上定标功能。因此,高光谱成像仪包括星下点成像模式、侧摆成像模式(摆镜侧摆±15°)和星上定标模式(摆镜转动±90°)3种工作模式。图3为高光谱成像仪主体实物。

图3 高光谱成像仪主体实物Fig.3 Photograph of hyperspectral imager
环境减灾二号A/B卫星高光谱成像仪具有宽谱段、大幅宽、高空间分辨率等特点,基于LASIS技术原理,幅宽增大和空间分辨率提高,必然会带来偏流角偏差控制和高速图像传输等问题,尤其是谱段拓宽到SWIR,更能凸显出高光谱成像仪在摆镜精度控制、Sagnac干涉仪研制及高质量图像高速传输等方面具有的技术特点。
2 高光谱成像仪技术特点
2.1 偏流角偏差控制技术
2.1.1 偏流角偏差分析
基于LASIS技术原理,高光谱成像仪完成1次“立方体数据”建立,需要保证对同一地物目标连续采集过程中推扫方向在像空间投影与探测器光谱方向不存在夹角(偏流角)。否则,对应的地物目标发生横向偏移,最终会影响输出的光谱精度[10]。对于VNIR光谱通道数100,SWIR光谱通道数115,经仿真分析,若控制高光谱成像仪的偏流角小于6′,高光谱成像仪每推扫1行数据时,横向偏移小于0.17%像元,光谱维全视场累计偏移小于0.45像元。依据真实数据仿真分析,对反演光谱的相对平均偏差影响小于3%,相对二次偏差小于0.4%,光谱角相似度优于0.999 9。通过地面数据处理时的姿态修正可以降低偏流角影响,因此偏流角可以忽略。
高光谱成像仪的偏流角与卫星平台飞行产生的偏流角[11]、高光谱成像仪在卫星上的安装角度精度和高光谱成像仪自身装配精度有关,见式(1)。
(1)
式中:Δ为高光谱成像仪偏流角不确定度;卫星平台姿态控制精度ΔS=3.6′;高光谱成像仪与卫星安装角度精度ΔA=3′;ΔI为高光谱成像仪自身的装配精度。
因此,控制高光谱成像仪装配精度ΔI≤2.7′,可以确保高光谱成像仪偏流角不确定度Δ≤6′,满足干涉光谱成像对偏流角的要求。
精确的光谱反演要求探测器光谱方向与干涉条纹严格垂直,后期无法通过调整探测器来补偿,因此在研制过程中需要严格控制摆镜和干涉仪误差精度,以实现高光谱成像仪自身的装配精度ΔI≤2.7′要求,具体包括指向镜法线与转轴轴线的夹角误差小于1′(摆镜侧摆±15°范围内),干涉仪条纹与像正交性偏差小于1′。前者涉及2路光谱成像系统所共用的高精度摆镜系统研制;后者涉及大幅宽带来的大尺寸高精度Sagnac干涉仪研制。由于需要同时兼顾2路光谱成像系统实现大幅宽成像,因此环境减灾二号A/B卫星高光谱成像仪在偏流角偏差控制难度上进一步增大。
2.1.2 高精度摆镜系统研制技术
一般,高光谱成像仪或成像相机前端会增加摆镜系统,通过摆镜的侧摆同步指向功能缩短重访时间,提高观测时间分辨率,如环境减灾一号A卫星超光谱成像仪(EDIS)、月基光学天文望远镜反射镜系统、资源一号01卫星的红外多光谱扫描仪(IRMSS)和美国索米国家极地轨道伙伴卫星的可见光红外成像辐射仪(VIIRS)均设计有摆镜系统[12-13]。环境减灾二号A/B卫星高光谱成像仪的摆镜系统研制,充分继承了环境减灾一号A卫星的超光谱成像仪,但是,由于增加了SWIR谱段的光谱通道,摆镜系统中的指向镜数量由1块增加为3块,相较于保证1块指向镜法线方向,同时保证2块指向镜法线方向的难度相对较大。因此,本文从摆镜结构布局优化设计和运动机构精度控制2个方面展开论述。
1)摆镜“轻巧型”结构
作为运动机构的负载,3块反射镜包括2块指向镜和1块定标镜,若负载质心偏离转动轴的旋转中心,摆镜系统工作过程中会带来额外的力。摆镜系统可简化为2点支撑的简支梁,图4为摆镜系统的受力分析。其中:f1和f2为轴承位置承受的径向力;q为简支梁单位长度上的不平衡力;l为承受不平衡力矩的简支梁长度。
若负载质心偏离转轴中心距离(负载旋转半径)为R,负载质量为M,负载工作过程中的角速度为ω,则产生的不平衡力为
F=MRω2=ql
(2)
轴承位置承受的径向力f1和f2为
(3)
由式(3)得出:若减小负载不平衡力对转轴产生的弯矩,降低轴承的径向受力,需要减小负载旋转半径R,即通过设计配重块将负载质心配平到转轴中心内。同样,配重块质量过大也会作为新的负载增加转轴的受力。摆镜的2块指向镜结构参数一体化设计,保证结构的对称性;转轴位置距离光轴Z方向(坐标系表示如图2所示)偏移8 mm,减小指向镜空间方向的尺寸;定标镜45°倾斜设计,并且与2块折轴镜呈三角构型布局,光路简单化,减少负载质量,降低配平的难度,最终在满足功能需求的前提下质量减小20%以上。

图4 摆镜系统受力模型Fig.4 Force model of scanning mirror system
2)高精度运动机构研制
依据偏流角偏差分析结果,摆镜系统要保证指向镜法线与转轴旋转轴线的夹角误差小于1′(±15°侧摆范围内),作为基准,转轴工作过程中需要保证晃动量最小。由于卫星空间资源有限,2块指向镜对称分布,减小2块反射镜的间隔,可以降低高光谱成像仪主体Y向(坐标系表示如图2所示)外包络尺寸,最终转轴由传统的单轴变为左右轴双轴结构。
轴承支撑位置跨度L为136 mm,箱体轴承位置支撑孔的同轴度为5 μm,双轴和负载V型架的配合面最大直径D为30 mm。若保证双轴与负载装配成为单轴后达到传统单轴结构的同轴度要求,则零件单轴和负载V型架的配合面平面度与轴线的垂直度δ可由式(4)计算,最终结果为0.000 6 mm(0.6 μm)。
(4)
由于传统单轴无法满足3块反射镜的高精度指向功能,依据单轴的设计思路,针对零件超高精度的平面度和垂直度要求,利用螺钉固定和圆锥销钉定位原理,将左右轴和负载组合成单轴,通过组合加工的方式保证转轴在2个轴承位置的同轴度为2.9 μm(图5为组合轴同轴度测量),这样既保证了转轴在轴承内自由转动,又降低了研制难度。

图5 组合轴同轴度测量Fig.5 Coaxiality measurement of combined shaft
运动部件完成系统装配后,利用转轴上的反射镜[14],通过经纬仪实测控制转轴轴系晃动量均方根为2.48″,且通过监测转轴轴系反射像得到的轴线轨迹图近似一个圆。摆镜系统完成装配后,摆镜在±15°不同位置,2块指向镜与转轴旋转轴线夹角实测值最大变化量为2″,分系统测试探测器正交性最大变化量为18″。
2.1.3 大尺寸高精度Sagnac干涉仪研制技术
相对孔径是影响高光谱成像探测灵敏度的重要因素,图6为Sagnac干涉仪原理示意,相较于基线产品,在相同像元尺寸和相对口径的前提下,傅氏镜焦距增加1倍,视场变大,入瞳距离增大。环境减灾二号A/B卫星高光谱成像仪干涉仪分光面尺寸增大1.4倍,分光面胶合面积增大2倍,干涉仪质量增大2.3倍,因此保证干涉仪相同误差精度和力学性能的难度增大。

图6 Sagnac干涉仪原理示意Fig.6 Schematic of Sagnac interferometer
干涉仪棱镜错位量影响光程差,进而影响光谱分辨率,干涉仪反射面的方位和俯仰分别影响干涉条纹的调制度和正交性[15]。因此,在干涉仪研制过程中必须严格保证干涉仪棱镜的错位量,在干涉条纹与像正交性(1′)的前提下还要控制分光面胶层厚度和胶层均匀性,从而满足干涉仪的无应力胶合。传统方法通过计算干涉条纹的宽度,间接控制干涉仪棱镜的错位量[16],干涉条纹与像的正交性通过十字丝来监测,而人工操作不可避免会带入随机误差。为了提高检测精度,将十字丝改为铅垂线,提高基准建立精度。为降低人员操作引入的随机误差,设计专用微调机构,以保证高精度数字化控制棱镜错位量和角度误差。图7为Sagnac干涉仪胶合实物及干涉条纹测试图。经测量,胶合后的干涉仪的干涉条纹与像的正交性偏差为20″,优于1′。
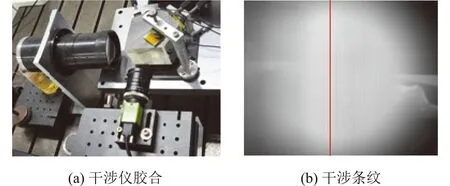
图7 Sagnac干涉仪Fig.7 Sagnac interferometer
2.2 大面阵CCD探测器高速成像传输技术
幅宽增大、空间分辨率及帧频提高,会带来数据量增大。高光谱成像仪可见光探测器选用背照式帧转移CCD器件,面阵大小为2048×256像元,帧频达到1200帧/秒。为了降低帧转移时间和提高数据读出速率,采用32路并行输出的方式,每路像元速率达到32兆像元/秒,这样造成高速条件下获取高质量图像的难度增大。为此,可见光探测器采用高速信号完整性分析仿真计算方法,解决多分布点容性负载条件下信号的反射振铃现象,实现高速容性负载驱动技术;对放大器输出、信号迹线、连接器进行建模,完成阻抗匹配与损耗分析计算,反复迭代优化设计解决高速模拟视频信号放大与传输问题;升级筛选业内最高性能与集成度的视频信号处理芯片ADDI7004,实现高密度视频信号处理问题,电路规模缩减为原有技术的1/4,大大减小了单机功耗、体积及质量。
3 高光谱成像仪环境试验和在轨成像
3.1 环境试验
3.1.1 环境力学试验
高光谱成像仪研制过程中经历环境力学试验,考核其在随机振动环境下正常工作的能力,以及暴露材料和工艺缺陷,并利用环境力学试验前后测试高光谱成像仪调制传递函数(MTF)变化情况来表征,见表2。结果表明:高光谱成像仪力学性能满足航天力学环境要求,也间接反映Sagnac干涉仪胶合面力学性能满足环境力学要求。

表2 高光谱成像仪环境力学试验前后MTFTable 2 MTF of hyperspectral imager before and after tests
3.1.2 热真空成像试验
高光谱成像仪研制过程中经历热真空成像试验,考核真空热平衡下系统的功能和热控性能。检测得出不同工况下的系统MTF大于0.24。图8为星上定标灯复原光谱,可知:不同工况下特征峰的位置具有很高的一致性;VNIR谱段光谱位置最大偏差0.49 nm,SWIR谱段光谱位置最大偏差0.82 nm,满足星上定标精度2 nm的指标要求。


图8 星上定标灯复原光谱Fig.8 Recovered spectrum of calibration lamp on-board
3.2 在轨成像
自2020年9月发射成功后,环境减灾二号A/B卫星高光谱成像仪在轨运行稳定,成功获取了VNIR及SWIR数据。图9为VNIR和SWIR通道的光谱复原图像立方体,以及不同地貌的光谱数据。数据表明:地物比例适中无变形,地表植被复原曲线正确。利用复原光谱与光谱辐射度计实测谱线之间的偏差,表征复原光谱曲线的准确程度。在VNIR与SWIR谱段,得到相对偏差在5%以下,符合光谱曲线准确度相对偏差要求,进一步证明双轴结构的高精度运动机构及改进后的干涉仪研制技术,可以满足谱线复原对偏流角的要求。
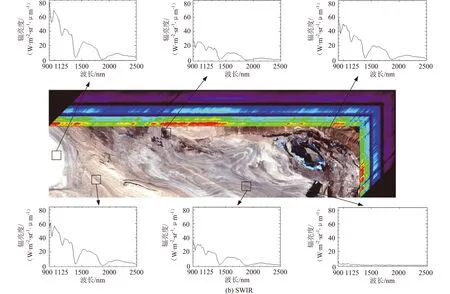
图9 光谱复原图像立方体及谱线Fig.9 Recovered spectrum image datacube and some spectra
4 结论
环境减灾二号A/B卫星高光谱成像仪可以同时获取从VNIR到SWIR谱段高光谱数据,针对由于幅宽增大、空间分辨率提高带来的偏流角保证困难,以及数据量增大导致获取高质量图像的难度增大,采用以下改进措施。
(1)传统的单轴结构无法满足3块指向镜的高精度指向功能,采用左右轴双轴结构组合加工和螺钉销钉定位的设计方法,为紧凑型摆镜的高精度运动机构设计提供一种新的方法。
(2)目前的Sagnac干涉仪研制技术,无法满足干涉仪正交性要求,改进的干涉仪胶合基准提高了检测精度,设计专用微调机构保证高精度数字化控制棱镜错位量和角度误差,为基于干涉光谱原理的宽谱段光谱仪研制提供了技术经验。
(3)高光谱成像仪成功在轨运行,图像数据质量良好,间接证明大面阵CCD探测器高速成像传输技术的可行性。
