行星着陆复杂形貌特征匹配与自主导航研究进展
2022-07-12崔平远高锡珍朱圣英姚文龙
崔平远,高锡珍,朱圣英,姚文龙
(1. 北京理工大学宇航学院,北京 100081;2. 深空自主导航与控制工信部重点实验室,北京 100081; 3. 北京控制工程研究所, 北京 100094)
0 引 言
行星探测作为深空探测的重要组成部分,是人类探索宇宙奥秘、揭示宇宙形成与演化和生命起源与进化的主要技术途径。目前,人类发射的无人探测器已经基本对太阳系各类天体进行了探测,实现了火星着陆巡视探测及小天体采样返回等目标,获得了大量珍贵的研究资料,同时促进了各基础学科的发展。近年来,行星着陆探测由于难度大、获取科学数据丰富而备受关注。
小行星探测方面,在经历了近距离飞越与绕飞探测两个阶段后,现阶段主要目标为实现小行星附着与采样返回。2003年日本宇宙航空研究开发机构(JAXA)发射的“隼鸟”(Hayabusa)探测器实现了着陆采样,获取了丰富的采样点信息,并于2010年6月成功返回地球。2004年欧洲航天局(ESA)发射了“罗塞塔”(Rossetta)探测器,在经过10年飞行之后,于2014年与它的目标—67P/楚留莫夫-格拉希门克彗星交会,其释放的着陆器“菲莱”(Philae)在数次弹跳后着陆在67P彗星表面。2014年,日本“隼鸟2”探测器成功发射,是世界上首次从小行星回收样本的“隼鸟”的后续探测器。2018年6月,“隼鸟2”抵达距离小行星龙宫20 km的位置,先后成功释放了“Minerva-II-1”和“吉祥物”(Mascot)小型探测器,并于2019年2月22日完成首次在小行星龙宫上的着陆取样任务,于2020年底返回地球。
在火星着陆探测方面,至今仅有美国成功实施了8次火星着陆探测任务,如1976年的“海盗”任务、2012年“火星科学实验室”任务和2018年的“洞察”任务,均获得了丰富的科学成果,极大地发展并完善了火星着陆探测技术。从“海盗”到“火星科学实验室”任务,采用了集成雷达高度计、多普勒雷达和惯性测量单元敏感器的导航方式,火星着陆精度已从280 km提升至20 km。2020年,先后有三个火星探测器发射成功,阿联酋“希望”执行环火探测、中国“天问一号”实施火星“绕-落-巡”一体化探测、美国“毅力”(Perseverance)搜寻火星生命迹象。其中,“毅力”在进入、下降和着陆阶段使用地形相对导航技术,以确保探测器安全、精确着陆至预定地点,并且正在为取样返回任务以及载人登陆火星做准备。
本文针对行星自主着陆过程的形貌特征提取匹配与自主导航问题,综述了目前的研究现状,分析了面临的难点与挑战,进而针对未来复杂形貌区域精确着陆,提出了实现形貌特征提取匹配与高精度自主导航需要解决的关键问题。
1 行星着陆复杂形貌特征匹配与自主导航难点分析
为了获得更为有价值的科学素材,往往需要探测器着陆到具有较高科学价值的特定区域,这就需要探测器具备精确着陆的能力。目标天体距离地球较远,通信时延严重,同时要求探测器具备自主导航的能力。基于惯性测量单元(Inertial measurement unit,IMU)航位递推的导航方法可提供探测器6自由度的状态信息,但该方法无法对初始偏差进行修正,且惯性测量单元存在随机漂移和误差,随着时间累积误差会逐渐发散,探测器着陆点误差椭圆半径达到100 km~300 km量级。针对上述单一导航方法存在的不足,目前着陆过程中主要采用融合惯导、雷达测距测速的自主导航方法,但由于缺乏其它敏感器辅助导航手段,无法获取着陆器水平位置信息,难以满足高精度导航的需求。为此,基于地形图像信息的光学导航引起了国内外学者关注。星表形貌复杂,存在大量的岩石、沟壑和陨石坑等地貌,一方面,其可作为导航观测特征,另一方面,陨石坑沟壑等边缘地势陡峭,是障碍地形之一,需要对其进行识别及规避。目前着陆动力学环境不确知,导航地形数据库尚不完善和观测信息有限,而实时性要求高,如何在对目标及其表面特征分析的基础上,开展图像处理与特征识别的相关研究,并充分利用各个敏感器测量信息实现探测器状态高精度估计,是复杂地形下行星着陆研究的重点内容。
从现有的研究进展来看,要实现行星着陆探测器高性能的自主导航,保障探测器在复杂地形区域安全成功着陆,需要解决以下若干难点问题:
1.1 下降图像尺度视点动态多变
探测器在行星着陆过程中,不同高度、视角及运动状态所获取同一地形观测数据的尺度及形状等表现出迥异的特性,这导致星表形貌特征的提取与匹配极为困难。而且,多视点图像间存在信息冗余,分别检测降低计算效率,难以满足着陆过程实时性要求。
1.2 星表形貌特征异构多样
目前行星着陆任务通常选择在平坦地形区着陆,以规避探测器着陆过程的危险,但大大降低了着陆区域的科考价值。为了获得更有价值的科学数据,未来希望探测器具备在复杂地形区域中精确着陆的能力。然而复杂地形区分布着岩石、沟壑及陨石坑等自然形貌,其先验知识欠缺,形状表观多样,直接影响探测器导航性能,同时给探测器安全着陆带来很大威胁。
1.3 导航信息不足
由于火星着陆动力学环境具有不确知、强非线性和时变性,同时现有的测距测速辅助惯性导航方法无法提供准确的探测器水平位置信息,导致高精度自主导航极为困难。光学导航对探测器位姿估计是不可或缺的技术,其中基于已知特征点的光学导航方法虽能获取探测器水平位置信息,但点匹配存在特征不明显和位置不确知导致估计不准问题。
2 星表形貌特征提取和匹配研究现状
目前行星表面形貌特征主要有两类:全局特征(Global feature, GF)和局部特征(Local feature, LF)。全局特征是指相对容易识别的地理特征,如陨石坑、山脊或巨石;LF是指某一属性突出的像素特征,如角点、边缘或斑点。
2.1 局部形貌特征提取和匹配
角点特征通常指图像中灰度变化剧烈的点,是一种常见的特征点,在纹理丰富区域中较易提取。常用的角点检测方法如Harris算法,具有角度不变性,但不具有尺度不变性,适合用相关性方法进行匹配跟踪。尺度不变特征变换(Scale-invariant feature transformation, SIFT)特征点在不同的尺度空间上查找关键点,并计算出关键点的方向,利用关键点信息实现图像间的准确匹配,其具有旋转和尺度不变性。但是SIFT关键点提取计算量较大,且对下降图像和星载地图之间的光照变化敏感。相较于Harris角点,SIFT特征检测算法不仅能够检测出图像中的兴趣点,还给出了兴趣点描述子。SURF检测算法是对SIFT的改进,通过利用积分图大大加快了检测速度。SIFT,SURF以及KAZE算法都可以较好地处理下降过程中的图像尺度变化,然而,这类方法并不具备仿射不变性,因此其性能会受到图像仿射失真的影响。对此,Yu等在SURF算法基础上,利用惯性测量信息改进Hessian检测模板,提出了具有抗仿射角度和尺度变化能力的局部特征检测算子。同时,Yu等提出以集合的方式构造特征描述子,以克服下降过程中特征尺度的变化。Wei等提出利用多角度SIFT算子,实现了下降图像序列之间的特征精确匹配。
2.2 全局形貌特征提取和匹配
陨石坑是最适用于着陆导航的形貌特征,也是探测器着陆过程中需要检测出的障碍,可在不同光照条件和无需相机高度和姿态信息的情况下实现特征提取、匹配和跟踪。陨石坑具有一致的几何形状,光亮-阴影区域以及明暗过渡边界等特有属性,基于陨石坑形态特征和其之间的几何不变量,国内外学者对陨石坑检测与匹配问题开展了大量的研究工作。Bandeira等针对陨石坑特有明暗结构强化边缘,然后分析边缘形状生成相应的模板,实现陨石坑模板匹配提取。此外,Wetzler等利用陨石坑明暗特性生成多尺度模板进行陨石坑明暗区域提取与配对,为减少模板数量,根据光亮-阴影区域所占比不变性生成固定模板检测陨石坑。但该算法只能获取陨石坑的中心点,不能确定陨石坑半径。Maass等针对各种不同形状的图像区域,利用最大稳定极值区域法(MSER)提出了尺度、位置以及光照不变的陨石坑检测方法。上述方法提取陨石坑后可利用区域匹配算法实现不用图像间陨石坑匹配。Cheng等提出了基于边缘的陨石坑检测算法,利用Canny算子提取图像中的边缘曲线,筛选并配对符合陨石坑形态特征的曲线,然后拟合配对曲线为椭圆来表征陨石坑。在陨石坑匹配方面,通过构建陨石坑椭圆曲线间的仿射不变信息,提出基于仿射不变量的陨石坑匹配算法。Yu等提出了一种结合明暗区域信息与图像边缘的陨石坑检测与匹配算法,基于椭圆曲线中仿射不变量采用WTA(Winner takes all)策略进行匹配,最后采用三维陨石坑模型消除误匹配。针对陨石坑阴影不明显的行星着陆导航图像,陈建清等提出了基于图像灰度值特征的陨石坑自主检测方法,解决了一般陨石坑检测方法对图像太阳高度角的依赖问题。针对3D特征检测与匹配问题,结合数字高程图,骆磊等通过计算特征坡度和曲率完成了月球陨石坑的检测。Salamuniccar等利用数字地形图取代光学图像,通过进行梯度及形态学分析,利用模糊边缘检测器实现了行星表面陨石坑特征的提取。
除上述直接利用陨石坑形态特性,模板和相对几何构型进行陨石坑检测与匹配外,Shao等研究了基于特征描述符进行陨石坑检测与匹配的方法,首先利用高斯金字塔和ELSD算法提取陨石坑圆弧,在支撑区域内构造圆弧带描述符,结合最近邻距离比(NNDR)和欧式距离约束实现曲线匹配,通过仿真验证了该算法具有缩放、旋转、光照不变性。但是该方法存在陨石坑边缘误检测及重复检测的问题。针对陨石坑检测存在不充分和不准确的问题,随着机器学习的发展,Kang等和Wang等分别提出了基于监督学习、半监督学习以及主动学习的天体表面陨石坑检测算法。在保证样本充足情况下,机器学习算法对不规则退化陨石坑都能达到良好识别效果,但目前来说该算法仅适用于在轨观测和离线分析,并不适用于着陆过程。图像特征的提取及基于该特征的匹配策略直接影响着算法性能及适用范围,其它陨石坑的检测和匹配算法得到了成功的发展,如张量投票、Hough变换、神经网络等,并针对陨石坑分布较为丰富的天体表面图像进行了测试,包括月球、火星、小行星和火卫一。丁萌等综述了国内外基于光学图像的陨石坑提取研究现状,并指出了未来研究方向。
3 自主导航技术研究现状
根据行星着陆可用导航敏感器可将导航方法分为惯性导航、雷达导航、光学导航和无线电导航,以及各敏感器之间的组合导航。光学导航是目前发展较为成熟的自主导航方法,并在深空探测任务中得到不同程度的验证和应用,其基本原理是利用星载光学敏感器获取天体及其表面的图像,通过图像分析处理来确定探测器空间位置、姿态和速度等状态信息。光学导航原理示意图如图1所示。自阿波罗8号(Apollo 8)任务首次使用后,在随后的水手9号、“海盗”等火星探测任务中作为地面测控的辅助导航手段实现了火星轨道的成功捕获。深空1号(Deep Space 1)任务实施了全自主光学导航技术验证,仅用星载成像系统获取恒星和小行星图像,探测器位置精度能够达到250 km,速度精度约为0.5 m/s,能够满足该任务在巡航段对导航精度的需求。2004年美国的“火星探测漫游者”任务中在着陆过程通过下降图像运动估计系统(DIMES)跟踪3幅序列图像中的角点信息实现对探测器水平方向速度的估计。2006年3月,“火星勘探者”任务借鉴了深空1号的技术经验,轨道器搭载了高动态性能的光学导航相机,同时拍摄火星及其卫星,验证了火星探测光学导航技术。除此之外,作为一种高自主性、低成本的导航技术,光学导航还多次应用于小行星、彗星等探测任务中。2005年美国发射的“深度撞击”(Deep Impact)任务利用导航相机拍摄彗星图像,提取彗星光心信息,实现了对探测器位置速度状态的估计。美国“近地小行星交会”(NEAR)任务利用光学测量信息扩展了导航系统,首次实现了采用陆标光学图像的导航,在最后接近过程中跟踪小行星Eros表面的陨石坑获得了远高于传统方法的导航精度。“隼鸟”探测器在小行星附近基于光学导航技术实现了悬停探测。
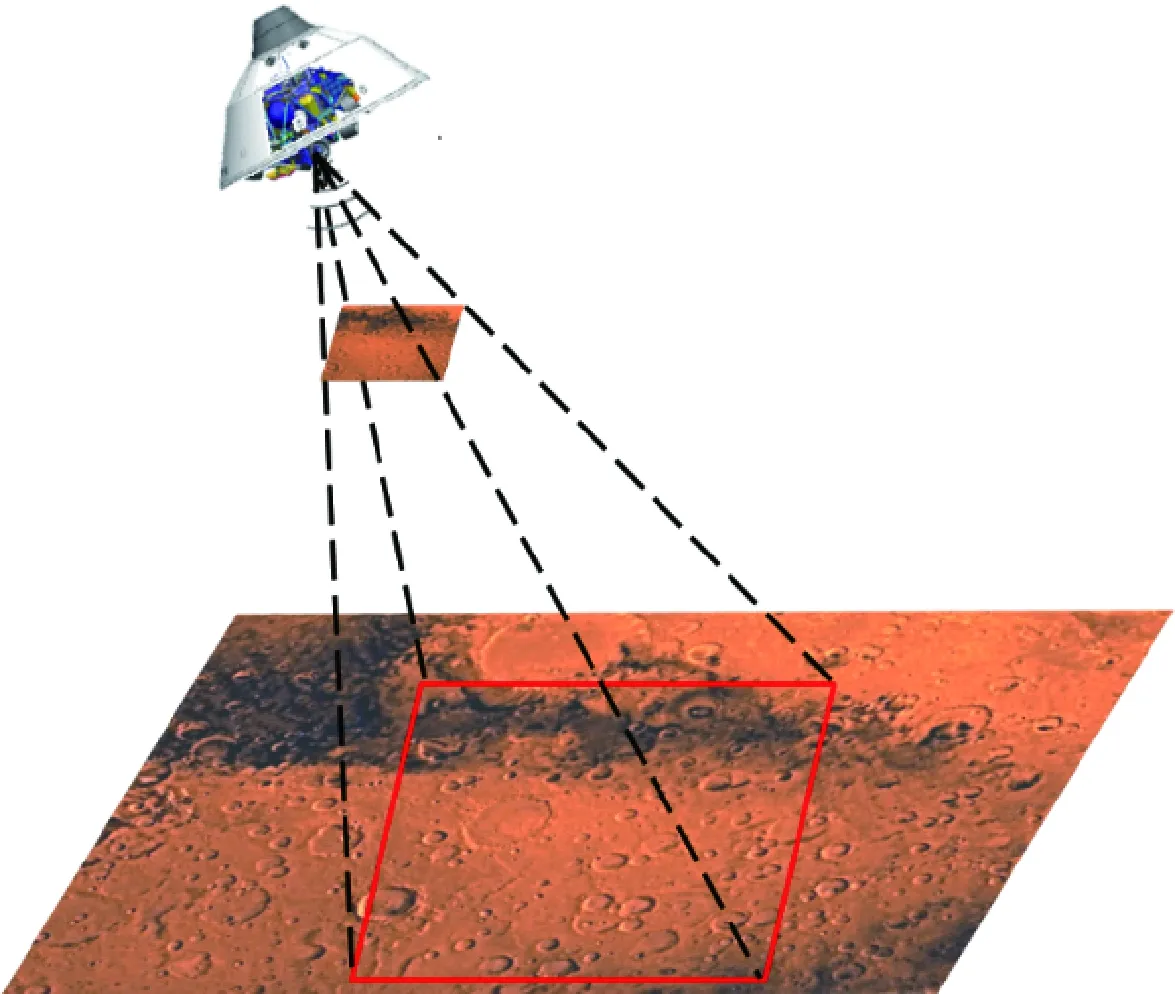
图1 光学导航
上述深空探测任务对基于光学图像自主导航的应用和试验验证表明了光学导航的可行性和对提高导航精度的巨大潜能。除上述方法外,针对行星着陆过程,国内外学者从不同角度和不同侧重点对基于光学图像信息的自主导航方法进行了深入地研究。
3.1 星表特征点匹配导航现状
光学相机在良好光照条件下使用高度范围不受限制,而且不依赖于地形,同时其体积质量小、功耗低,获取星表环境信息丰富。考虑到探测器有效载荷发电的需求,大多数任务需要在有光照的地方着陆,因此喷气推进实验室(JPL)认为光学相机是未来行星着陆探测任务中最主要的导航敏感器之一,并将其应用到“火星2020”任务的着陆器设计中,用于安全着陆点选择和地形相对导航。光学相机获取的着陆区域图像测量信息不仅可以根据几何关系直接解算探测器运动状态,还可以用于视觉辅助其他敏感器进行组合导航。“火星探测漫游者”任务中利用DIMES取代多普勒雷达估计探测器相对地面的水平速度,该方法并没有获得探测器绝对位置信息。Cheng等发展了跟踪小行星表面弹坑的自主导航方案,采用基于特征自动检测、图像配准和特征跟踪的光学导航方式来确定探测器与目标天体之间的相对位置和姿态,基于此提出了利用已知位置陨石坑的火星着陆纯视觉导航方法。但是,它需要在每幅图像中同时检测至少3个位置已知的特征,且只能获得成像时刻的探测器位姿,导致状态估计不连续。上述纯视觉导航方法仅利用图像测量信息直接解算探测器状态,不依赖动力学模型,简单可靠,适用于航天器交会对接及弱引力天体着陆过程,无法直接应用于大天体着陆过程。同时,纯视觉导航方法无法直接获得探测器的速度信息。
为了满足月球软着陆任务的需要,JAXA提出了利用光学测量的地形匹配导航方案。具体来说,该方案利用激光测距仪测得探测器到月球表面的距离和速度,然后利用图像测量信息通过滤波算法获得探测器的位置和速度。此外,Li等对基于光学测量信息的行星着陆导航进行了深入研究,提出了小行星软着陆自主光学导航制导方法以及基于光学信息辅助IMU导航方法,并验证了其可行性。JPL则开发了基于计算机视觉的小行星自主着陆导航算法,通过跟踪可见的特征点和识别陆标来保证探测器的精确制导和避障,该算法通过处理小行星的图像流和激光测距仪测得的探测器到指向特征点的距离来估计探测器的相对运动、绝对位置和小天体的三维表面地形图。Robert等基于已有任务图像和导航信息生成数字地形图,提出了基于陆标跟踪的光学导航方法,提高了光学导航算法的计算速度,并开发了用于导航的目标小天体模型和自然特征陆标自动识别算法。Mourikis等对融合惯性测量与陆标视线测量的导航方法进行了研究,通过提取已知位置的陆标特征点,结合惯性测量单元的测量信息,运用滤波计算得到探测器的最优运动估计。通过融合位置已知陆标的图像信息和其它敏感器测量信息可以实现探测器状态精确估计,但当着陆环境未知、导航陆标的绝对位置信息未知时,上述导航方法将不再适用。即时定位与地图构建(SLAM)方法通过重复观测环境特征定位自身位置和姿态,再根据自身位置构建增量式地图,达到未知环境下定位与地图构建的目的。在SLAM算法中,导航特征位置信息被增广到状态方程中,计算量太大,难以满足着陆实时性要求,且SLAM算法利用回环检测消除误差累积,因此其并不适用于火星等大天体着陆过程。此外,由于不存在先验地图信息,着陆器三轴位置状态不可观。与SLAM算法不同,基于序列图像间几何约束的导航方法引起了国内外学者的关注。该方法无需估计导航特征的3D位置信息,大大减少了计算量。Gurfil等利用子空间约束(subspace-constraint)估计飞行器的状态。为了研究滤波器对模型误差的鲁棒性,Webb等进一步发展了Gurfil的方法,提出一种隐式扩展卡尔曼滤波方法,该方法利用极线约束代替子空间约束构建隐式测量方程。Wang等提出了利用三幅图像建立三焦张量(trifocal-tensor)几何约束的导航方法。但是,只有在三幅图像中同时被观测的特征可用于更新导航系统。文献[55]研究了一种基于三视图几何的导航方法,该方法利用三幅图像中的任意两幅构建几何约束。然而,该方法导航性能取决于采集三幅图像的时间间隔,时间间隔较小时会使几何约束条件变得病态。Xu等针对行星着陆过程提出了利用下降序列图像的自主导航方法,获得了着陆器的部分绝对状态信息。为了确定探测位置尺度信息,除利用测距敏感器外,徐超等通过双目视觉相机实现了着陆器的全状态高精度估计。然而双目相机受相机基线的影响测量范围有限,且其对环境光照非常敏感,计算复杂度高。
3.2 星表特征线匹配导航现状
上述已知环境和未知环境下的行星着陆光学导航方案中主要利用星表地形中的局部特征设计观测模型,实现精确导航。然而,一方面,由于探测器与目标之间的距离远、相机分辨率低,局部特征检测与匹配比较困难,并且容易受到噪声的干扰而失真。另一方面,由于局部特征的全局位置很难获得,一般只能用于估计相邻两个着陆器位置之间的相对状态。因此,Shao等通过分析星表山脊和沟壑等地理特征,提取特征直线设计导航观测方案,实现行星着陆视觉导航。Bilodeau等研究了基于陨石坑检测和匹配的行星着陆导航技术,该算法计算效率高,但仅利用陨石坑中心的视线测量信息。Wokes等通过在一幅图像中仅识别三个没有任何先验信息的陨石坑来估计航天器的姿态。然而,该方法需要已知目标天体半径,使其应用范围受到一定限制。Lu等介绍了一种基于范数的优化方法,通过利用数据库中陨石坑的位置和大小来计算着陆器的绝对姿态。上述方法仅利用陨石坑特征中心位置信息,并没有利用全局信息。目前陨石坑曲线提取和匹配在地外天体着陆导航中的应用研究还比较少。在纹理稀疏地形下,Meier等针对机器人导航提出了利用贝塞尔曲线(Bézier curves)的SLAM算法。曲线SLAM依靠立体摄像机和IMU敏感器,利用参数化曲线求解机器人的全6自由度位姿。然而,该方法同样仅利用曲线的控制点而不是全局信息构建测量方程,易受噪声干扰。为充分挖掘地形图像中测量信息以提高行星着陆导航精度,Cui等针对曲线特征导航进行了深入研究,分别提出了利用未知陨石坑和已知陨石坑的曲线匹配视觉导航算法。
3.3 自主着陆导航仿真验证技术
行星着陆导航技术应用于着陆器在轨飞行之前,必须经过一个在地面上模拟着陆环境下的参数测试和验证阶段,主要来完成对着陆器动力学的模拟,产生其6自由度的下降轨迹、姿态信息与导航系统给出的估计位姿信息相比较,可以测试导航算法的自主位置确定、姿态确定性能。
JPL采用由电机直接拖动着陆器相机系统在滑轨运动的系统方案,即着陆器按已设计好的空间轨迹数据来模拟实际的空间运动,用于测试和验证JPL提出的光学导航方法的性能。该系统可以模拟着陆器的一维运动轨迹及二维姿态运动状态,完成对光学导航方法相关性能参数的测试。由于该系统只能模拟三维运动,用它来模拟复杂着陆运动轨迹比较困难。
美国南加利弗尼亚大学利用直升机模拟着陆器,即利用着陆器的动力学数学模型驱动直升机来实现着陆器的位置、姿态状态,同时利用直升机携带导航相机对地面上指定的区域拍照结合直升机携带的其他敏感器来完成导航功能,以此验证软着陆自主导航方法的精确性和实时性,以及软着陆方案的可行性。但是,该系统采用数学的动力学模型驱动直升机,并没有实现目标天体实际重力环境的模拟。
此后,JPL利用在降落伞平台上(从40 km处成像,如图2所示)和探空火箭(从4 km以下成像,如图3所示)收集包括图像流在内的大量数据集,以及行星表面图像测试基于陆标匹配的地形相对导航技术,测试结果表明了该算法对光照和场景外观变化具有鲁棒性。

图2 降落伞平台[68]

图3 探空火箭[68]
4 行星着陆复杂形貌特征匹配与自主导航关键技术
未来行星探测任务追求更高的科学回报,任务形式也日趋复杂,因此对行星着陆形貌特征匹配与自主导航技术提出了更高的要求。本节根据行星着陆形貌特征匹配与自主导航技术的发展现状及未来任务需求,总结形貌特征匹配与导航技术实现突破的关键点。
4.1 形貌特征鲁棒提取与跨尺度匹配
在复杂地形背景下提取形貌特征并完成特征匹配,是实现探测器自主精确安全着陆的前提和保障。形貌特征的鲁棒提取与精准快速匹配,可以为探测器障碍规避以及高精度实时导航定位服务。
一方面,针对不同高度、视角及运动状态引起同一形貌特征尺度及形状动态变化,考虑重复图像内容以及遮挡等问题,提取星表图像的尺度仿射不变特征,实现形貌特征鲁棒提取与精准快速匹配。另一方面,确定形貌特征在参考地形图中位置是实现探测器绝对地形导航的前提,因此需研究序列图像和参考地形图间的特征匹配。考虑如何构建具有良好独特性的特征描述符,实现在尺度、旋转、光照等变化条件下的跨尺度匹配,并对上述方法的工程实际应用方面进行研究
4.2 多类型异构形貌特征评价选取
光学导航对探测器位姿估计是不可或缺的技术。由于行星表面分布着复杂异构地形特征,如陨石坑、岩石、沟壑和山脊等,利用图像处理算法能够获取点、直线和曲线等多类型几何特征测量信息。行星着陆自主光学导航方案中,导航特征的数量和位置是影响导航精度的重要因素。一般情况下,导航特征数量越多,导航精度越高,但现阶段星载计算机运算能力和存储空间有限。因此有必要研究导航特征优化方法,以提高行星着陆自主导航精度和运算效率。此外地形特征复杂多样,因此需要进一步评价分析利用多类型地形特征信息的导航方案精度异同,为未来行星着陆自主光学导航方案的设计提供理论与方法参考。
4.3 未知环境下高精度自主导航
观测方案设计是实现探测器状态估计的前提条件,导航数据库通常仅包含星表明显的自然形貌特征,识别特征点的绝对位置信息比较困难,同时特征点观测无法保证导航算法在地形弱纹理和光照变化大等复杂环境条件下的鲁棒性。因此,如何在仅有的导航信源中充分挖掘地形图像观测信息,设计自主导航方案以进一步提高导航性能,值得深入研究。此外,当着陆环境未知,行星表面地形特征绝对位置无法获取时,有必要针对未知形貌环境下探测器绝对运动状态估计这一问题,设计一种有效的探测器导航方法,保证探测器精确安全着陆。
行星表面分布着大量复杂多样的自然形貌,如陨石坑、岩石、沟壑和山脊等,除研究单一特征匹配导航外,紧密融合多类型形貌特征及扩展不规则曲线导航值得深入研究,以进一步提高导航精度和保证导航方案在复杂地形下普适性。
5 结束语
本文分析了行星着陆复杂形貌特征匹配与自主导航的难点,介绍了行星着陆复杂形貌特征匹配与自主导航技术研究现状,并根据未来行星着陆任务需求,提出了发展形貌特征匹配与自主导航技术的关键。目前火星着陆动力下降段可用的导航特征包括特征点和特征线,点匹配存在特征不明显和位置不确知导致估计不准问题,而线匹配具有特征明显、容易匹配和绝对位置信息可知等优点。图像导航方面由点匹配导航到线匹配导航发展,最终实现多类型特征匹配导航。为实现更高精度的火星着陆,还需进一步提高行星着陆复杂形貌特征匹配与自主导航技术能力,实现形貌特征鲁棒提取与跨尺度匹配、评价选取多类型异构形貌特征,从而实现未知环境下高精度自主导航。
