基于三维激光扫描技术的古建筑测绘与建模探讨
2022-07-11白冰
白冰
(辽宁省地理空间成果应用中心,辽宁沈阳 110034)
中国有悠久历史,祖辈留下的古建筑都是宝贵的文明结晶,是中华文化的传承。但任何建筑都是有寿命,天气和其它不可抗力因素也会加大建筑物的破坏,随着时间的推移,再坚固的建筑也会消亡。随着科学技术的发展,测绘手段迎来了三维激光扫描的技术革命,在城市建筑测量,地形测绘、变形监测、基础设施建设、水利工程、电力设施等方面都得到了很好应用,其高效、精准、快速、实时、高密度等特点,使它成为目前测绘古建筑最好的手段。
测绘行业传统的古建筑测绘手段主要通过全站仪、水准仪、RTK等仪器单点测量采集,效率低,数据采集不全面。三维激光扫描是一种非接触式测量手段,整合了激光技术和测量技术,可以快速高效采集目标物体的三维空间数据和材质纹理等信息。
一、基本原理和特点
1.三维激光扫描技术原理
三维激光扫描的原理是激光测距,发射器发射出一个激光信号,通过被测物体表面的漫反射所反弹,沿着与原发射路径几乎相同的轨迹,回到三维激光扫描仪的接收器之中,仪器内部软件对其进行计算和分析,记录被测目标表面点的空间三维信息、反射率信息和纹理信息等。
2.三维激光扫描技术优势
三维激光扫描技术与传统测绘手段相比拥有十分突出的优势:一是精确度高,传统的测量手段精度完全依靠点位之间的坐标构建,点位精度取决于点位的设置,而三维激光扫描其精度远远高于传统测量技术,精度分布也十分的均匀;二是非接触测量,无需棱镜就可以对被测目标进行数据的采集,使测量人员的操作空间更大;三是受外界条件影响较小,三维激光扫描是通过激光测距来获取数据,无论是白天黑夜,光照条件优劣都能可靠的采集数据;四是采集数据带有被测物体的光学特征,可以获取目标物体的色彩纹理信息。
二、技术流程和内容
1.技术流程
首先进行现场勘探,布设测量控制网,再使用三维激光扫描仪采集数据,得到原始点云数据后在Recap软件中进行数据处理,最后在Revit软件中进行古建筑建模。
2.数据采集
数据采集的流程为:现场勘探—控制网布设—测站点布设—建筑物扫描。现场勘探的目的是摸清建筑物及四周的地形环境,便于设置测站点和测站数。使用三维激光扫描仪对目标进行全方位扫描,采用自由设站的方式,保证覆盖建筑物的同时尽量减少测站数,降低配准次数和误差。在测量的时候,要求相邻测站之间有一定的重叠区域,测站点的布设会用到标靶,这是因为建筑物的结构比较复杂需要多次扫描,各测站点的数据要整合为一体,这就需要同名特征点来帮助匹配,标靶的作用就是代替同名特征点。在标靶的布设时,要确定两个相邻的测站之间有三个及以上的公共标靶,但是标靶不能在同一条直线上,标靶和测站点之间也要确保通视。建筑物扫描时,仪器的架设要略高一些,可以提高扫描的精准度和减少冗余数据量。对于建筑物不同的部分,扫描的精度距离要因地制宜,确保达到理想的扫描结果(图1)。

图1 原始点云图
3.数据处理
(1)点云拼接
点云数据拼接的目的是为了将各测站的数据整合到一起,即同名坐标点位映射。各测站点的点云坐标系都是独立坐标系,先将不同测站的点云统一到同一坐标系里面,然后进行点云拼接,拼接操作的本质是误差函数的运用,用来体现各点云重合区域之间的吻合水平与程度。使用最小二乘法进行迭代运算,尽可能的减小误差,实现各点云数据间的合理拼接。在统一坐标系的配准过程前,需要解算出点位坐标的7个变换参数(3个旋转参数,3个平移参数,1个尺度参数)。在解算参数的基础之上,采用七参数法进行配准,还可使用其他方法配准,如ICP迭代最近点算法和四元素配准算法。
(2)点云去噪滤波
测量会出现误差,会影响点云质量,产生点云中的噪点。噪点产生的原因分三种:一是环境因素,刮风下雨或落尘扬灰等都会让扫描采集时记录下不需要的数据,要减少这种数据,需在扫描前设置好参数,保证有合适的阀值避免误差;二是仪器本身和操作人员操作能力的问题;三是被测物体本身,不同的材料、颜色和纹理对激光的反射率不同,都能造成误差,这种误差的消减需在测量时尽可能保持合适的扫描距离。
点云数据里的噪点会对后续的建模等工作带来影响,需要对其进行平滑式处理。点云滤波处理噪点的方法主要有中值滤波法,平均值滤波法和高斯滤波法。本文采用中值滤波法来进行滤波去噪,中值滤波法是在一个指定的区域内用3个相邻的点位数据的平均值替换原目标点的值,主要能清除点云数据中的毛刺,突起等。
(3)点云切割
三维激光扫描采集的点云数据大量且密集,运行数据较吃力。为了更好处理点云数据,需对原始数据进行切割,将不需要的大部分点云剔除。点云数据的切割方法有很多,本文采用基于混合区域的点云数据切割方法,具体步骤是先经过二次曲面技术拟合测量的点云数据,再加上曲面高斯曲率与平均曲率结合,就可以对原始的区域开始进行分割,初始边界的提取采用基于边的方法,最后可实现点云数据的良好分割(图2)。
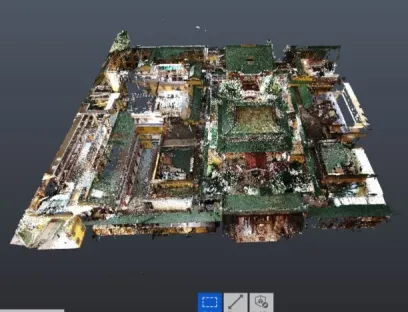
图2 点云数据切割
(4)点云简化
点云的简化是为了尽可能的减少建模过程中不需要的点,简化必须保障后续的操作效率与建成模型的精度,这是点云简化的重点。简化前要根据实际需求先设好误差上限值,使输出成果更符合需求。对于点云的简化,根据点云中数据点彼此之间的空间位置关系,来设计其空间拓扑关系(网格),解算出每个空间点的数据信息,根据这些信息的大小来优化设计点云数据。
4.古建筑三维建模
(1)建模基础准备
在Revit软件中打开点云文件后,首先需要建立轴网标高和视图范围,轴网是在平面中确定模型的范围,标高则控制模型高度,没有轴网和标高,模型构建时则无法精确控制其位置。标高可以根据个人的需求来设定,这里是设置到每层楼板的底部。标高可以根据建筑不同部分设置多个。打开标高视图,点云数据不是正南正北方向,因为在拼接的过程中没有指定正方向,所以点云数据出现偏移。找到要建模的建筑,沿着建筑外边做一条辅助线,在这条辅助线的一端做一条正方向的辅助线,重置建筑的旋转中心,将旋转中心放置到两条辅助线的交点处,将点云数据旋转至正南正北方向。
(2)古建筑各部分的构建
古建筑各部分的构建需根据实际情况确定,主要包括墙体、门窗、屋顶和其它部分(图3)。墙体的建立是结合导入的点云数据描图,根据三维视野中点云厚度确定墙体的后度。门窗的建立首先在立面图中先做辅助线,辅助线来确定门窗的位置和尺寸,并移动使其位置对齐。屋顶的创建方法是结合点云图像选择屋顶所在标高,框选出范围并设置角度,使用迹线绘出屋顶,在立面图中调整位置,屋顶装饰物使用内建模型来构建。其它部分构建是沿着图像使用样条曲线进行捕捉,尽量与点云数据做到贴合,线条绘制完成后在三维视图中确定模型厚度与位置,场景中其他小构建可通过建族来完成,建立多种族后载入项目摆放到指定位置即可。

图3 建模成果渲染图
三、结束语
三维激光扫描技术在当今社会有着极为广泛的发展前景,亦是各行业应用和研究的热点。本文以三维激光扫描的应用实例为基础,基于三维激光扫描技术在古建筑的测绘与建模方面进行了探讨,包括了数据的采集、处理和建模,结果表明三维激光扫描在空间三维信息的获取有着巨大的优势,与传统测量方法手段进行互补,可以提高测绘工作效率,获得更佳的测绘产品。
