超低空联合建模方法在河道景观工程中的应用
2022-07-11孙瑶
孙 瑶
(深圳市水务规划设计院股份有限公司,深圳 518131)
无人机倾斜摄影测量技术充分的结合了无人机在航测领域的低成本、低空域、所获影像分辨率高、机动灵活的特点和倾斜摄影测量技术在三维建模方面方便、廉价和高效的突出优势,为三维建模提供便捷高效的道路。近年来,无人机倾斜摄影测量发展迅速,已经广泛地应用于工程建设、智慧城市、安保消防等领域。
目前以五镜头的倾斜相机已经成为主流,国内众多厂商都纷纷推出了高集成度的五镜头产品,极大地推动了无人机倾斜摄影测量在国内的发展。但是由于挂载于无人机飞行平台上的相机的摄影角度相对固定,获取的影像对于摄影盲区与光滑细长的地物建模效果不理想,出现模型缺失、变形及纹理拉花的现象,某种程度上制约了该项技术的广泛应用。
连蓉等人针对山地城市复杂的测区环境,采用多种相机系统及数据采集策略,基于无人机倾斜与近景摄影测量联合建模的方式,获取目标区域的精细化模型[6]。卞敏等人采用空地一体的建模方法较好地完成了校园的精细化建模[7]。
在工程建设领域中,项目建设区域内的建构筑物往往对工程方案设计具有决定性的影响,在工程设计阶段获取精准的建构筑物的空间位置和外部轮廓信息显得尤为重要。在河道景观设计中,利用无人机倾斜摄影测量技术对跨河桥梁和高压线塔进行模型重建时,受无人机飞行高度及相机拍摄角度的限制,容易出现以下2点问题:
(1)河边高压线塔由于结构复杂且塔架的连接钢条纤细光滑,模型重建较为困难,容易出现模型缺失。
(2)跨河桥梁底部属于无人机低空摄影的盲区,通常会出现模型漏洞、纹理拉花、模型扭曲等现象。
本文通过无人机低空倾斜摄影与超低空补拍的联合拍摄的方式,获取目标地物详尽的结构与纹理信息,基于常用的实景三维建模软件与修模软件DP-Modeler,实现项目区域精细化建模,而后分析模型精度,验证该种联合建模方式在河道工程中的可行性。
1 基本原理和技术路线
无人机航摄倾斜影像三维建模的关键技术包括影像预处理、多视影像匹配,区域网联合平差,密集点云匹配,三维点云构网,纹理重建等步骤。具体技术路线如图1所示。
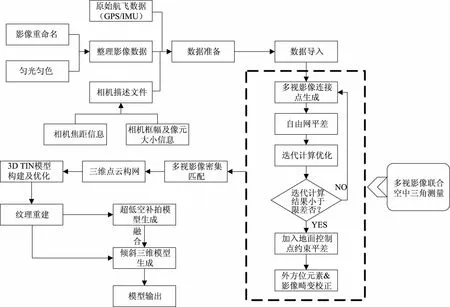
图1 技术路线
影像预处理包括剔除有云雾遮挡和像移过大的影像,以及对影像进行重命名和匀光匀色处理。
多视影像匹配为模型重建程序中的核心环节,常用的影像匹配方法为基于特征的影像匹配方法,如SIFT和ASIFT特征匹配;SIFT算子对影像间的平移、旋转,影像间的尺度相异和影像间的亮度变化具有很好的适应性,ASIFT算子则对于视角不同、存在仿射变形的倾斜影像具有良好的匹配效果[4]。
基于影像的间的连接点,通过区域网平差后得到精准的影像外方位元素,再进行密集匹配,常见的密集匹配的算法有:带共线条件约束的多片最小二乘影像匹配、基于多基元多影像匹配、基于物方面元的多视立体(Patch-based Multi-view Stereo,PMVS)等多种算法,其中PMVS算法重建的效果相对较好,该算法为现阶段三维重建中使用频率较高的密集匹配算法[8]。在密集匹配生成的点云的基础上进行构网,经过平滑和简化等处理,即生成物体表面的三维几何模型(又称3D TIN模型)。对影像进行筛选、优化处理后,将纹理映射到白膜上,生成高精度真三维模型。最后通过修模软件将模型进行融合,实现精细化建模。
2 项目区域分析与数据采集
2.1 工程背景及概况
屯梓河碧道工程位于深圳市龙岗区坪地街道,地处与惠州市交界处。本次工程范围共计2.2km2,项目区域内共计有15座高压线塔,2座跨河桥,其中一座为深圳外环高速跨河桥,另一座为盐龙大道跨河桥。本工程要求提供高精度及高精细度的三维模型成果数据,为景观方案设计提供基础地形资料,测区范围如图2所示。

图2 测区范围
2.2 无人机选型
2.2.1低空倾斜摄影无人机
国内无人机种类繁多,运用较为广泛的有:多旋翼、固定翼和垂直起降固定翼。对于不同的应用场景需选取相应的机型。在河道景观提升工程项目中,对模型精度和精细度要求高,则要求影像分辨率大,相机的曝光点高度需要足够低。当无人机飞行高度降到一定高度时,为保障飞行安全,飞行速度不可过快。根据规范:在曝光瞬间造成的像点位移一般不应大于0.5个像素,最大不应大于1个像素。目前市面上主流的五镜头相机下视相机的焦距为25mm,像元大小为3.91μm,当飞机的飞行高度为140m时,地面影像分辨率为2.2cm,像点位移计算公式如下:
式中,δ—像点位移,个像素;ν—航摄飞机飞行速度,m/s;R—地面分辨率(GSD),m;t—相机曝光时间,s。当相机曝光时间为1/1000s时,飞行速度的上限为11m/s;当相机曝光时间为1/1500s时,飞行速度上限为16.1m/s。
非量测型的普通数码相机曝光时间相对固定,要控制影像像移符合规范要求,只能降低无人机的飞行速度。
由上可知,项目对飞行平台的需求为:飞行速度慢、飞行高度低、安全性高。多旋翼无人机对飞行速度无要求,可空中悬停,而飞行高度可根据需求实时调整,且飞行安全性相对较高,其在小区域河道景观提升工程的航测任务中,相对于固定翼无人机具有无可比拟的优势。综上选择多旋翼无人机作为运载平台。
2.2.2超低空摄影无人机
超低空摄影无人机作为低空倾斜摄影的补充,需具备稳定、灵活、操纵性强,具有定位定姿的功能。
2.3 外业数据获取
根据项目需求,重建整个项目范围内的实景三维模型。采用四旋翼无人机执行倾斜摄影任务,以变高飞行的作业模式,获取测区范围内的无人机倾斜影像。倾斜摄影任务设置的航向重叠度为80%,旁向重叠度为75%。相对航高设置为140m,影像地面分辨率为2.2cm,测区下游部分采用井字形飞行。共获取影像3.8万张。在测区中均匀布设了11个像控点,像控点间距约为1km,采用网络RTK施测。
补拍采用手动遥控无人机的方式。对测区内5座高压线塔进行上下和环绕飞行补拍,由于高压线塔有高压线东西方向穿过,无人机先于塔顶上方环绕飞行拍摄,环绕飞行采用渐近降高式不断靠近高压线塔,拍照时保持高压线塔始终位于照片的中间位置;再操控无人机于相距电塔约20m的南北侧上下飞行拍摄,相机曝光位置如图3所示。

图3 高压线塔超低空补拍相机曝光位置
对于2座跨河桥体的补拍,无人机沿桥体左右两侧分别以仰视、平视、斜俯视以及正俯视4个视角对桥体进行拍摄。平视和仰视拍摄时,保持无人机与桥体的距离15m左右,斜俯视和正俯视拍摄时使无人机与桥体的距离保持在40m左右。通过不同视角的拍摄,充分获取桥梁各个部位的纹理及结构信息,相机曝光位置如图4所示。
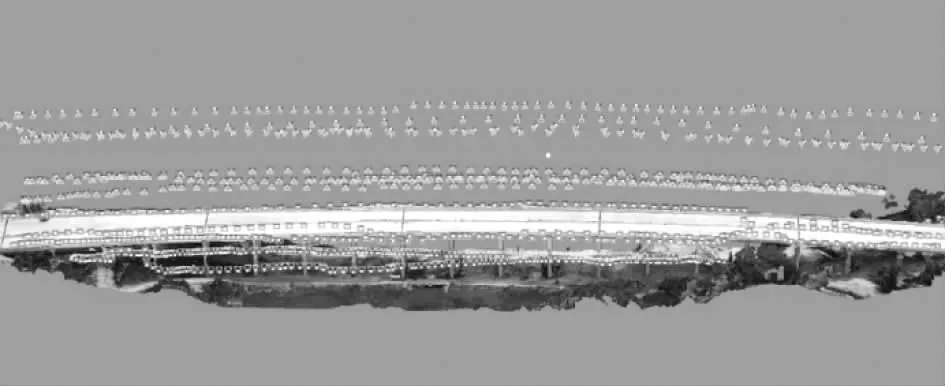
图4 跨河桥梁超低空补拍相机曝光位置
通过人工控制无人机的飞行方向与飞行速度,使得两张相邻影像具有一定重叠度,航向和旁向都保持在60%~80%之间。补拍影像共计4944张,影像分辨率在0.5~1cm之间,同时在补拍的每座桥梁和高压线塔周边均匀布设4个像控标靶作为像控点,采用网络RTK施测像控点坐标。
3 工程应用
3.1 空中三角测量
空中三角测量为还原相机在每次曝光时所得影像间的姿态关系,首先通过影像的匹配算法得出影像间一定数量的连接点,再关联影像之间的连接点、构建自由网,最后利用区域网平差的方法通过迭代计算出解算出每张影像的精确外方位元素,为后续建模流程提供精确的参数。
无人机倾斜摄影时,飞机按预定的航线飞行,相机曝光位置规律性强,影像间重叠度变动幅度小,一般情况下倾斜影像在影像处理软件中可顺利完成空三测量。而超低空补拍是由人工操控无人机的方式完成,无人机姿态变化较大,导致相机曝光位置较为杂乱,规律性较差,且影像间重叠度变化较大,加剧了影像间匹配的难度,补拍影像在通用的建模软件中难以完成空中三角测量,容易出现错位、分层,此处我们采用Meta shape进行空三,得到补拍影像精准的外方位元素。
3.2 联合三维模型重建
经空三计算后,分别对倾斜影像和补拍影像进行建模,同时生成OSGB及OBJ格式的模型文件,以便于后期模型修饰和模型间的融合。
单采用倾斜影像生产的模型成果,由于飞机飞行高度高、相机摄影角度固定,造成倾斜影像中高压线塔的纹理及结构信息不够充足,导致高压线塔模型塔顶缺失,高压线塔模型塔顶部分缺失如图5所示;倾斜影像存在摄影盲区则致使桥梁模型底部出现空洞、变形,跨河桥梁模型底部空洞如图6所示。

图5 高压线塔模型塔顶部分缺失

图6 跨河桥梁模型底部空洞
将超低空补拍影像的空三成果从Meta shape中导出,再导入建模软件中进行建模,需注意在对超低空补拍影像建模过程中,要将补拍所建模型的坐标原点设为与倾斜三维模型坐标原点一致,便于后期在DP-Modeler中对倾斜三维模型上的相应部位进行替换,使得补拍模型与倾斜三维模型无缝贴合,实现联合建模。
高压线塔模型如图7所示,采用超低空补拍的影像含有高压线塔丰富的纹理和结构信息,所得高压线塔模型较为完整。跨河桥梁模型如图8所示,可以看出空地联合建模很好地解决了跨河桥梁模型空洞、纹理拉花的问题。最终生成模型中的桥梁底部和高压线塔的外部轮廓及空间位置信息得到很好的展现,为该工程的景观方案设计提供了精准的基础数据。

图7 高压线塔模型

图8 跨河桥梁模型
3.3 模型精度分析
在本项目实施中采用RTK施测了测区中联合建模及其他部位部分地物点坐标,并与模型中提取相应位置的坐标进行对比,对比结果见表1—2。超低空补拍部位由于无人机采用贴近被摄物体飞行,具备超高的影像分辨率,致使模型精度相较倾斜模型精度得到小幅度提升,联合模型整体优于1∶500测图精度,满足景观方案设计所需的精度要求。

表1 联合建模部位精度对比表 单位:m

表2 倾斜三维模型精度对比表 单位:m
4 结语
本文从实际出发,有效地解决了由于无人机飞行高度高和相机存在摄影盲区导致的测区特定位置上的影像信息不全,致使模型空洞、拉花和缺失。生成的三维模型很好地展现了测区的全貌,地物细节得到了较好的表达,为碧道工程的景观方案设计提供了真实可靠的模型数据。
但是本次联合建模的方式为将补拍影像和倾斜影像分开建模后再进行叠加,由于补拍和倾斜摄影采用的相机镜头不同,导致两种影像之间存在较为明显的色差,虽然对两部分影像进行过匀光匀色,但是模型上的叠加部分仍然较为突兀;且倾斜影像上的有关高压线塔与桥梁的信息被全部弃用,造成影像资源的浪费。基于以上两点不足,下一步的工作将补拍影像和倾斜影像一块空三后再融合建模,进一步解决模型空洞、拉花和缺失的问题。
