基于UWB 室内定位与人像识别的轨迹溯源方法研究
2022-07-11刘博斐朱雨豪卢琛
刘博斐 朱雨豪 卢琛
(中电科新型智慧城市研究院有限公司 广东省深圳市 518000)
1 引言
当下室内爆发疫情屡见不鲜,大量工作人员被派往现场快速调查、隔离感染人员,然而,经常耗费大量人力、物力才能寻找到一丝迹象。
目前轨迹追溯的方法主要是通过事后研判的方式,现有技术手段主要利用基站定位、智能视频监控技术来对视频和图像数据进行分析,目前的解决方法主要为以下几种:
(1)通过基站定位快速寻找业务目标的行程轨迹,然而,基站定位误差较大,一旦信号出现漂移,系统自动将大量人员误判为密接者。
(2)结合业务目标的人物画像、行程描述,事后通过海量视频流进行人工研判,但该方法无法精细判断业务目标曾在具体哪个镜头下出现,何时出现,因此,只能通过大量人工查看不同镜头中可能出现的画面,耗费巨大的人力。如图1 所示。
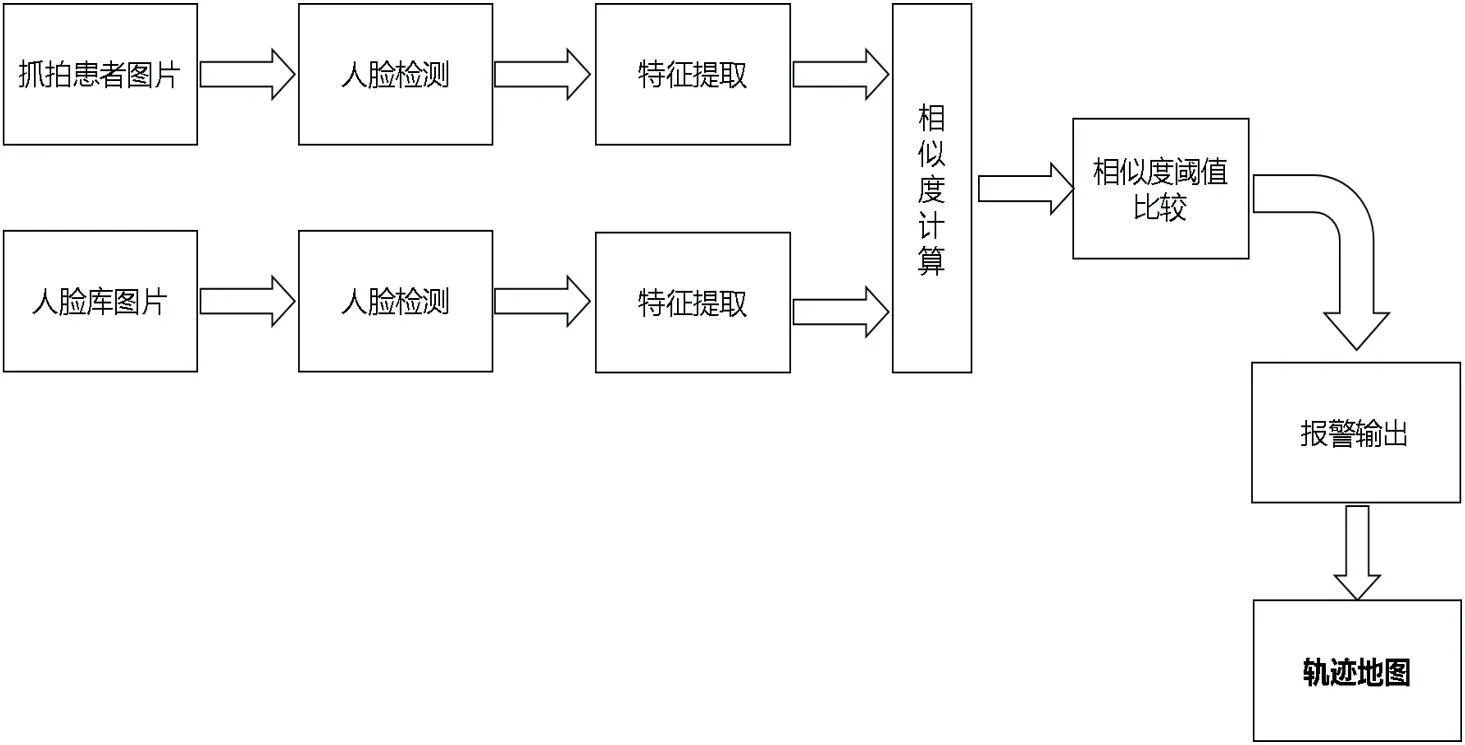
图1:人像轨迹流程图(人脸抓拍)
(3)通过智能前端采集的人像图片数据,根据图像数据精确判断业务目标的活动轨迹和时间。然而,智能前端在室内覆盖不均匀,易受角度、光线等原因导致数据错漏,同时不同智能前端触发的临界点不同,导致存在漏拍或误拍的情况,因此人脸抓拍的数据采集也十分有限。如图2 所示。
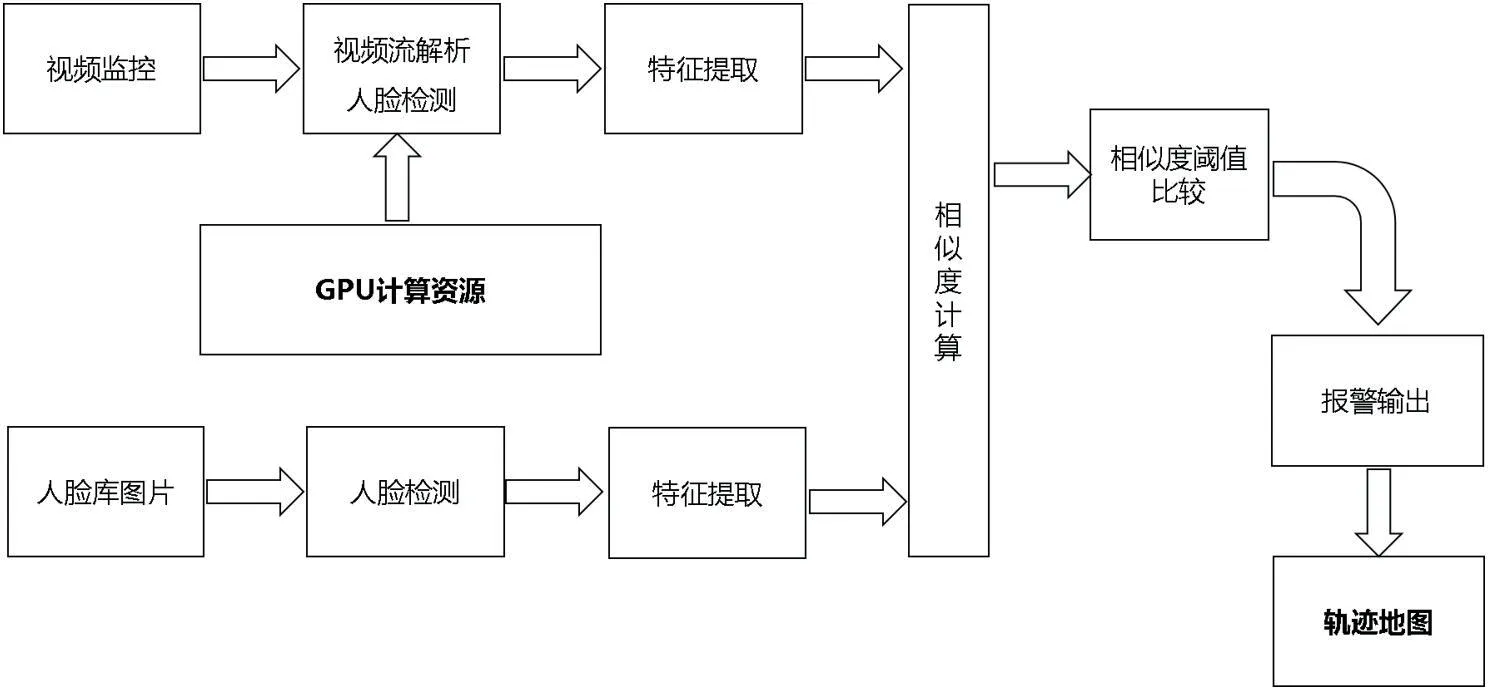
图2:人像轨迹流程图(人脸抓拍)
(4)视频流数据通过高密GPU 计算资源快速解析人脸并提取人脸特征,通过与人脸库中业务目标的人脸特征值进行相似度比较,当相似度达到阈值时,系统产生告警,并在地图上展示轨迹信息。
以上四种现有解决方法中,由于普通视频监控需要耗费大量人力通过肉眼捕捉业务目标出现的画面,其效率极低;智能前端抓拍机数据集通常有限,且触发人脸捕捉画面的临界点难以把控,导致人脸数据出现错漏场景;然而,高清视频监控中的视频资源解析需要高密计算资源全天候24 小时不断提取特征、快速比对,所需的计算资源成本较高。与此同时视频监控(含智能)的位置信息以GPS 为主,而室内GPS 坐标无法描述具体的轨迹信息。
本文提出一种UWB(Ultra Wide Band,超宽带)与人像识别的联合溯源研究方法,将有效避免以上解决方法中存在的缺陷。UWB 的主要优势是低功耗、对信道衰落(如多径、非视距等信道)不敏感、抗干扰能力强、不会对同一环境下的其他设备产生干扰、穿透性较强(能在穿透一堵砖墙的环境进行定位),具有很高的定位准确度和定位精度。系统依托UWB 室内定位技术,获取业务目标的轨迹信息,通过轨迹信息快速定位智能视频中存在的错漏数据集,有效破解室内定位技术无法精准辨认业务目标是否为本人这一难题。空间位置信息和视频信息的叠加将有效提高轨迹研判效率。
2 异构系统时钟同步模型探讨
随着通信网络技术的迅猛发展,大型互联网络系统对时间精确度的要求也越来越高。视频监控系统对时钟的精度要求较低,而基于TDOA 的UWB 无线室内定位系统具有较高的时钟精度要求,本文重点采用基于PTP(Precision Time Protocol)的时钟同步网络技术,通过搭建PTP 的时钟同步网络,将其中一台授时服务器作为主时钟,其他授时服务器充当从时钟进行网络搭建。
依托室内精准定位技术,快速高效解决智能视频在轨迹溯源问题的缺陷,本文将重点研究如何利用UWB 室内定位技术有效提升智能视频快速寻找和发现业务目标。
实时时钟同步模型是智能视频系统与室内定位系统的基础支撑,统一的身份ID 和时间戳能够快速实现位置信息与视频流、图片流的关联,因此本系统将部署统一NTP 授时服务,如图3 所示。

图3:时钟同步方案
两套系统网络首先向服务端发送NTP 包,NTP 包中包含了发送时间戳T1,当服务端接收到NTP 包时,依次填入包到达的时间戳T2、包离开的时间戳T3,然后立即把包返回给客户端。客户端在接收到响应包时,记录包返回的时间戳T4。客户端通过上述4 个时间参数就能够计算出2 个关键参数:NTP 包的往返延迟d 和客户机与服务器之间的时钟偏差t。客户端使用时钟偏差来调整本地时钟,以使其时间与服务器时间一致。
假设NTP 的请求和回复包延时相等,而T1、T2、T3、T4 为已知。那么

由此可见t 与T2、T3 差值无关,即两种技术的客户端时钟与服务器处理请求所需的时间无关。因此,客户端可通过T1、T2、T3、T4 计算出时差t 去调整本地时钟。
3 融合定位方法研究
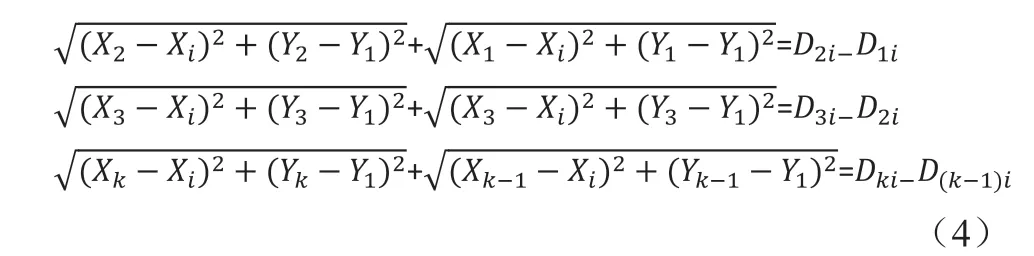
融合定位方法中,业务目标携带的标签向基站发送信息,基站接收信息后通过到达时间差法(TDOA)实时计算标签的位置坐标。TDOA 是测量不同基站接收到同一标签的定位信号的时间差,并由此计算出标签到不同基站的距离差。假设标签到任何一个基站的距离差为d,可在两个基站之间呈现一条双曲线。当同时有k( k ≥3) 个基站参与定位时,多个双曲线之间的交汇区域就是对用户位置的估计,由式4 可以计算出用户的位置。
以二维空间为例。信息节点Ni 和参考节点Nj 之间的每个距离Dji 都决定了一个以Dji 为半径、Nj 为中心的圆Ni的位置是由中心位于(N1,…,Nk)半径为(D1i,…,Dki)的k 个圆的交点来决定。
由此,UWB 室内定位系统根据以上方法可快速计算并获取业务目标的坐标信息。在UWB 室内定位系统中输入业务目标ID,快速检索业务目标的历史活动轨迹,并输出坐标点位集(Xi,Yi)和对应的时间戳Ti,以(Xi,Yi)和Ti 为基准,智能视频系统快速检索抓拍的相似人脸图片集Di 与对应的时间戳T'。
当Ti=T^'时,每一 (Xi,Yi)中,当Di ≥1 时,即相似人脸图片集Di 中存在至少1 张相似图片,则室内定位系统与智能视频系统两条轨迹完全匹配,图片数据可能存在遗漏,但不影响轨迹信息,即任一轨迹均可实现溯源。该情况为理想状态,具体系统流程图4 所示。
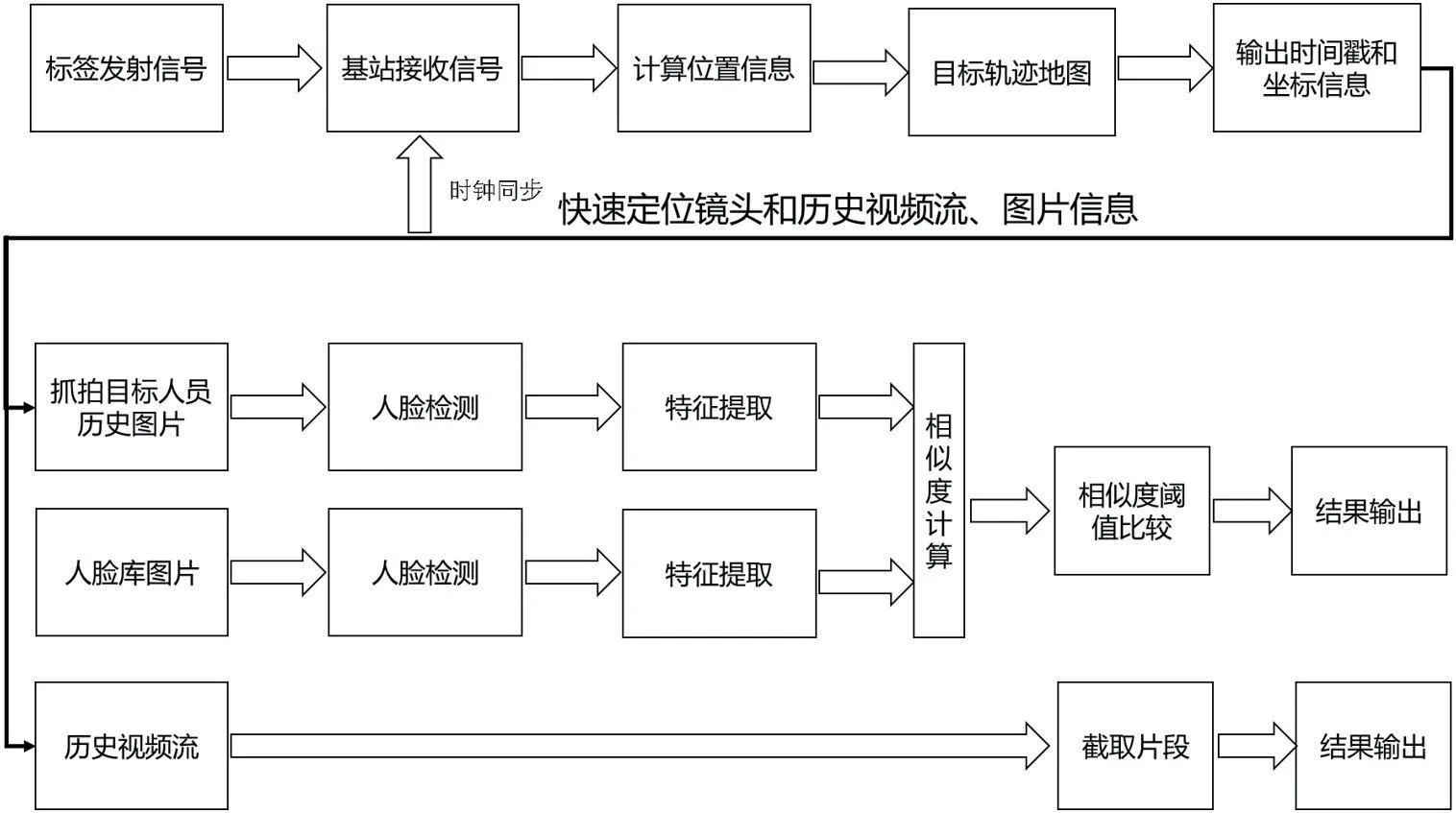
图4:系统流程图
当Ti=T'时,每一(Xi,Yi)中,当存在部分Di=0 时,即在(Xi,Yi)中存在部分相似图片数据为空,则以(Xi,Yi)与Ti为基准,通过智能视频系统调取视频流,通过视频流确认业务目标是否经过,如经过则说明智能视频系统存在遗漏数据,将视频截图导入智能视频系统完成轨迹拼接;如未经过则说明室内定位系统采集的坐标非业务目标本人。
当Ti=T'时,每一(Xi,Yi)中,当Di=0 时,即在(Xi,Yi)中存在全部相似人脸图片数据为空,则以(Xi,Yi)与Ti 为基准,通过智能视频系统调取视频流,通过视频流确认业务目标是否经过,如经过则智能视频系统遗漏所有数据(存在业务目标伪装、智能视频监控抓拍功能未开启两种情况),将视频截图导入智能视频系统完成轨迹溯源;如未经过则说明室内定位系统采集的坐标非业务目标本人;如未经过,且检测到视频流显示断续,则判定智能视频系统前端在该时刻处于离线状态或网络不稳定。
通过UWB 室内精准定位技术可快速确定业务目标在室内活动轨迹,系统获取其活动坐标信息和时间戳后,有效捕捉镜头位置信息和镜头中业务目标出现的视频帧画面和图片画面,根据抓拍图片和视频流的视频帧画面的可进行研判,同时可判断是否存在同行者和密接者。本文提出的方法将结合区块链技术有效关联视频、图片数据与定位数据。具体方法如下:
(1)标签位置信息实时存储至中心节点,即业务目标在室内活动的节点时间、位置存储在中心节点;视频流和图片流的数据、属性信息(镜头编号、IP 地址、通道号、GPS信息)等存储在视频中心节点,室内精准定位的中心节点与视频中心节点提取特征值并对身份信息加密后均上传至区块链平台。如图5 所示。
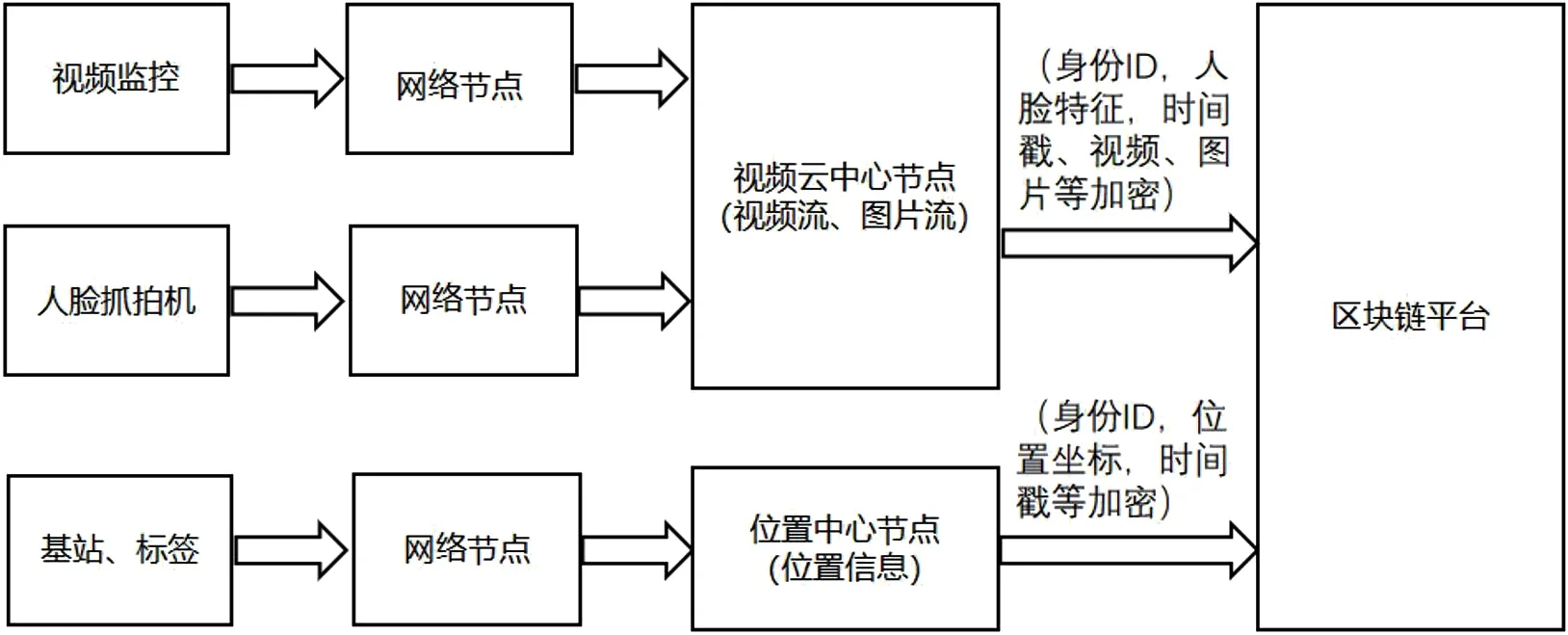
图5:视频、图片与空间位置存储方案
(2)区块链平台利用唯一身份ID 遍历业务目标的室内轨迹和时间戳,与视频中心节点中存储的前端视频监控的点位、时间进行匹配,从海量视频流中快速定位业务目标出现的时间点,截取视频流片段;从海量图片流中快速定位业务目标出现的抓拍图片,通过人脸识别、特征比对确定目标,快速完成业务目标在室内的轨迹溯源。
运用区块链技术对每个业务目标赋予唯一的身份识别ID 溯源,实时监测人员的工作动态,对异常状态及时生成报警,实现对人员的活动轨迹追踪溯源。同时对入链的数据经过特定的加密技术加密,降低了数据外泄的可能,提高数据安全性,而且利用区块链技术可以大幅提升数据的法律效力,避免数据可能被人为操作修改的情况。
4 结语
本文主要针对室内大规模视频监控覆盖场景,如高铁站、地铁站及大型商超等。通过融合室内精准定位技术,高效快速回溯业务目标的轨迹信息,结合轨迹信息、时间戳快速定位视频流和图片流。然而,单一技术存在一定缺陷,室内定位可快速获取人员轨迹,智能视频技术可对真实画面进行二次确认,只有两种技术的融合才能精准、快速、高效的捕捉业务目标和密接者的轨迹。如室内定位可快速获取人员轨迹,智能视频技术可对真实画面进行二次确认。融合技术的研究一方面有助于实现UWB 定位系统联合视频监控(含智能)的快速回溯,即通过UWB 室内精准定位技术,确定业务目标在室内活动轨迹,系统获取其活动坐标信息和时间戳后,快速获取镜头位置信息和镜头中业务目标出现的视频帧画面和图片画面,获取抓拍图片和视频流的视频帧画面可快速进行研判,同时可判断是否存在同行者和密接者。另一方面有助于UWB 定位系统快速辅助视频监控(含智能)定位遗漏数据方法,即视频监控(含智能)在室内覆盖不均匀,同时易受角度、光线等原因导致数据错漏,UWB 室内定位正好弥补这一缺陷,反之亦然。通过UWB 定位系统能够快速回溯业务目标的轨迹信息,系统结合轨迹信息、时间戳信息快速定位视频监控(含智能)中的画面,可快速结合视频帧画面确认图片抓拍库中是否存在遗漏图片数据。
