综合模块化系统中的控制网络设计
2022-07-11李阜东
李阜东
(中国电子科技集团公司第十研究所 四川省成都市 610036)
1 引言
近半个世纪以来,航空电子系统经历了四个主要发展阶段:分立式、联合式、综合式、先进综合式。分立式航空电子系统中的雷达、通信、导航等设备均具有独立的处理器和显示控制设备,通过专线相互连接。联合式航空电子系统则采用了综合的控制和显示,通过1553B 多路数据总线对系统中各设备进行数据传输交换,完成对雷达、通信、导航、显示器等航空电子系统设备的统一控制、集中显示、故障集中处理等功能。目前,随着美军F22、F35 战机的出现以及我军三代半、四代战机的研制,航空电子系统已处于综合式到先进综合式的快速发展过程中,以标准模块为基础构建的综合化系统已成为当前航空电子系统发展的趋势。
在联合式航空电子系统中,系统控制指令仅发送至执行特定功能的设备,再由该设备完成指令的执行,控制指令和数据的传输通道可由设备间的互联总线实现。在以标准模块为基础构建的综合化系统中,执行特定功能的设备被多个由软、硬件资源构成的功能线程所取代,系统通过调度各类标准模块进行组合,并加载各类软件协同运行,以完成某项特定的系统功能。系统内部控制管理及数据传输的最小单元由设备细化至模块、单元,单一的互联总线已无法适应模块级控制的需求,系统内控制指令和数据的传输通道将由更为复杂的控制网络来实现。本文在某模块化综合通信、导航及识别系统的基础上,对系统控制网络的设计进行了研究和探讨。
2 模块化综合系统架构
某模块化综合通信、导航及识别系统的系统架构如图1所示,系统可划分为天线孔径、射频处理、信号与信息处理三个资源域,其中射频处理、信号与信息处理资源域中的硬件资源均由标准化、通用化的模块组成。系统工作时,可由天线、射频预处理模块、变频滤波模块、信号处理模块组成一个功能线程,在信号处理模块中加载特定的波形处理软件,实现特定的功能需求。

图1:模块化综合系统架构图
以实现通信功能为例,在接收时,接收信号经天线进入射频预处理模块进行低噪声放大、滤波等处理后,通过开关矩阵发送至变频滤波模块,在该模块中进行下变频、滤波等处理后输出中频信号,经开关矩阵送入信号处理模块,在信号处理模块中进行信号的解调、解扩等处理后得到基带信号,再送入数据处理模块进行信息层面的处理。在发射时,待发射的数据信息由数据处理模块送至信号处理模块进行调制,得到中频信号后经开关矩阵送入变频滤波模块,在该模块中进行上变频、滤波等处理后,送入射频预处理模块进行放大、滤波,再经天线发射出去。
当上述功能线程运行时,运行于信号处理模块上的波形处理软件成为该功能线程的临时核心,负责对组成该功能线程的各模块的工作状态进行控制,同时将功能线程产生的数据信息传输至后端进一步处理。而在系统层面,则需要对各功能线程的工作状态和资源配置进行统一调度和管理。
作为模块化综合系统的基本特征,系统还应具备资源重构能力。重构可定义为在某种条件或状态发生时,利用系统资源动态的重建系统中的局部功能甚至全部功能。在图1所示的系统中,通过开关矩阵和数字交换网络,信号可以在不同模块之间切换,系统可以在各资源域中选取不同的模块进行组合构建功能线程。
由此可见,在模块化综合系统运行时,系统需实时掌握各类模块的工作状态以便选择合适的资源构建功能线程,功能线程构建完成后需要实时对各模块的工作状态进行控制,产生的各类数据信息也需要实时传输。传统的单一互联总线已无法满足系统的控制需求,而代之以一种更为复杂的、多层次的、多总线形式的控制网络,作为系统内控制指令和数据的传输通道。
3 控制网络设计
3.1 分层结构
为适应直接面向模块的控制需求,与图1 系统架构相适应,系统控制网络分为如图2 所示的四个层次,各控制层的功能如下:

图2:控制网络分层结构
3.1.1 顶层控制
是飞机航电系统对本系统的控制,来自航电系统的控制指令通过航电总线发送至本系统,对系统的工作状态、工作模式及工作参数进行控制。同时系统运行过程中产生的各类数据信息通过航电总线与航电系统进行交互。
3.1.2 功能层控制
是由系统控制管理模块发起的功能性控制,包括系统工作模式的控制,系统内各模块的初始状态配置,功能线程构建,功能线程的工作模式和参数设置,功能线程产生的各类数据信息交互,功能线程运行状态监控,系统运行过程中各模块状态监控,系统重构的启动和组织等。
3.1.3 实时层控制
是在功能线程实现过程中,信号处理模块向执行该功能线程的变频滤波、射频预处理等模块发起的实时参数控制。
3.1.4 物理层控制
是各模块内部的控制和管理,响应上层的命令实现自身的状态控制和物理层的状态检测。
3.2 多总线设计
在图2 所示的控制网络中,不同类型的控制指令和数据信息对传输的实时性、可靠性的要求不同,其传输途径和对象也有很大区别,单一的总线形式无法完成系统内各个层次控制的需求。因此,在上述分层控制的结构下,针对各类指令的传输要求,设计了多总线结构,为不同类型的控制指令和数据信息构建传输通道。
3.2.1 顶层控制总线设计
顶层控制总线作为本系统与航电系统的接口总线,需遵循航电系统的总线架构,由航电系统确定。目前常用的航电总线主要有1553B 总线、AFDX 总线、FC 光纤总线等。
3.2.2 功能层控制总线设计
功能层控制总线包括以下两类总线:一类高速总线,用于实现系统控制管理与各功能线程的信号处理、数据处理之间的高速数据传输,以及系统控制管理对功能线程的工作模式和参数设置;一类维护总线,用于实现系统控制管理对模块资源的配置和健康状态检测。
3.2.2.1 高速总线
高速总线的设计要求主要包括数据传输带宽、传输时延、传输可靠性以及总线拓扑结构。其中数据传输带宽需满足多功能线程并发执行时的总线负荷需求,传输时延可控并在可接收的范围内,传输过程具备容错机制,总线拓扑结构具备各节点间的数据任意路由交换能力,具备良好的扩展能力。同时还需考虑总线节点电路、传输介质以尽可能小的硬件规模实现。目前常用的高速总线主要由RapidIO 总线、1394B总线等。
本系统选用RapidIO 总线作为系统骨干总线。RapidIO互连技术支持芯片到芯片、板到板之间的通信,还支持嵌入式设备的背板连接,当前第3 代协议单通道支持的最高速率为10.3125Gbps,端口支持1x、2x、4x、8x、16x 多种配置模式,端口最高速率可达160Gbps,其总线带宽完全能够满足机载综合化系统的数据传输带宽需求。RapidIO 总线网络中各节点具有完全对等性,可通过交换网络构建任意的拓扑结构,大大提高了系统的灵活性。RapidIO 支持丰富的维护和错误管理功能,能够进行错误检测错误遏制和错误恢复等操作,符合航空电子系统高可靠性的要求。其设计的要点包括:
(1)根据系统的资源配置和数据传输需求,设计网络拓扑结构,定义网络传输速率和数据交换模式;
(2)根据节点的处理器类型,规范驱动函数设计要求;
(3)RapidIO 总线标准定义了物理层、链路层和逻辑层标准,在系统应用时,需根据系统网络拓扑结构和数据传输需求,制定应用层传输协议。
3.2.2.2 维护总线
维护总线在系统中承担模块状态监控和配置管理的功能,总线节点数较多,对指令传输的可靠性要求较高。本系统选用在工业控制领域大量使用的CAN 总线作为系统维护总线,并在CAN 总线底层协议基础上,通过设计合理的冗余机制和制定完善的高层协议,提高总线传输的可靠性。其设计的要点如下:
(1)对CAN 总线的负载、物理层连接情况、传输数据量等进行分析,设计CAN 总线的网络拓扑结构、工作速率、终端匹配形式;
(2)CAN 总线标准仅定义了物理层和链路层标准,在系统应用时,综合考虑总线的仲裁机制、数据传输需求、总线负载等条件,制定应用层的传输协议;
(3)分析总线节点的物理实现形式,规范各节点网络定时参数的设置准则,并针对采用不同处理器平台的节点,开发标准的总线操作驱动函数;
3.2.3 实时层控制总线设计
实时层控制总线主要完成各功能线程中信号处理模块对变频滤波、射频预处理模块的实时控制。实时控制总线必须具备低时延、容错和适应机载环境等要求,在本系统中选用差分异步串行总线实现,自定义串行总线传输协议,在链路层设计容错机制。实时层控制总线的设计,还应着重考虑与系统重构能力相适应。
在模块化综合系统中,资源动态配置和重构过程主要通过如图3 所示的开关矩阵和交换网络来实现。通过开关矩阵,多个信号处理模块、变频滤波模块及射频预处理模块可以任意组合实现多个功能线程,实现系统资源的动态配置。并且在其中某个模块出现故障时,可以通过开关矩阵的切换用同类模块代替,实现系统功能重构。

图3:系统重构时实时控制总线交换
在功能重构的实现过程中,模块资源发生变化,信号处理模块到变频滤波、射频预处理模块的控制指令传输通道的连接关系也会随之发生变化,即要求信号处理模块到变频滤波、射频预处理模块之间的控制指令传输通道具有根据系统的资源配置情况进行动态切换的能力。因此,实时层控制总线的设计还应包含实时控制总线交换网络的设计,该网络在射频信号交换之外实现实时层控制命令的交换,是系统实现资源动态配置和重构的基础。本系统在控制管理模块中采用FPGA 逻辑实现实时层控制总线的动态切换,可以满足实时控制总线的低时延要求。
3.3 冗余备份设计
控制网络作为综合模块化系统中各类控制指令和数据信息的传输通道,各总线的传输稳定性和可靠性直接关系到系统的运行状态。尤其是功能层控制总线,均采用了较为复杂的总线结构,存在交换机或节点故障引发大面积总线通信故障的可能性,因此在控制网络设计过程中,需针对这类总线采取冗余备份的设计措施。而顶层控制总线的冗余备份机制由航电系统统一设计,本文不作讨论。实时层控制总线直接与各类功能模块接口,采用点对点传输,总线传输故障等同于功能模块故障,可采用故障重构的方式恢复系统功能,不再进行冗余备份设计。
3.3.1 RapidIO 总线冗余备份设计
RapidIO 总线采用基于报文交换的互连体系结构,网络的运行高度依赖于交换机的正常工作。因此,RapidIO 总线的冗余备份设计主要通过对RapidIO 总线交换机进行冗余备份设计实现。本系统采用图4 所示的主备RapidIO 总线交换架构。
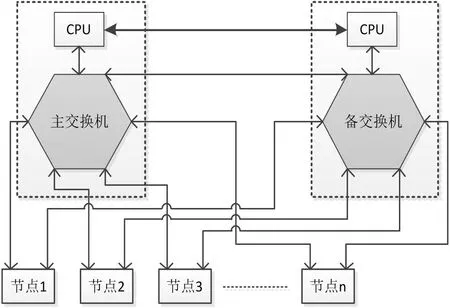
图4:RapidIO 总线冗余备份设计
图4RapidIO 总线网络中设计了一主一备两个交换机,各叶子节点均有主、备两个RapidIO 总线端口,分别连接至主、备交换机的相应端口,形成主、备两套独立的RapidIO总线。系统运行时,默认使用主交换机构建的网络进行通信。备交换机则处于热备份状态,监听主交换机的工作状态。一旦判定主交换机故障,系统控制管理实时通知各叶子节点进行通信端口切换,RapidIO 总线各节点均切换至备交换机构建的网络进行通信。
3.3.2 CAN 总线冗余备份设计
CAN 总线是一种有效支持分布式控制和实时控制的串行通信总线,采用多主站的协议,通过非破坏性的总线优先级仲裁确定总线访问的优先权。CAN 总线本身具备一定的容错能力,节点出现严重故障时具有自动退出总线的功能。但是在实际使用过程中,发现节点出现硬件故障,尤其是CAN 驱动器出现故障时,可能会影响到整条总线通信的稳定性。因此针对CAN 总线的冗余备份设计,主要通过物理链路的冗余备份实现,总线的冗余结构及节点的冗余结构如图5 所示。

图5:CAN 总线冗余备份设计
图中CAN_A 和CAN_B 两条总线互为备份,系统中的各节点同时接入两条总线。节点在发送数据时,通过读取本节点CAN 总线协议处理器中错误计数器的错误计数值来判断当前总线状态,选择当前发送应选用的总线,接收时则对来自CAN_A 和CAN_B 两条总线的数据均进行接收处理。
4 结束语
本文在某模块化综合通信、导航及识别系统的基础上,对综合模块化系统的控制网络设计进行了研究和探讨,提出了一种多层次、多总线结构的系统控制网络,并对各类总线的设计要点及总线网络的冗余备份设计进行了分析。目前,该控制网络已经在某模块化综合通信、导航及识别系统项目中得到成功应用,对类似综合模块化系统设计具有参考意义。
