开闭环双系统双轴太阳跟踪装置的设计与研究
2022-07-11李雪松邵戎尹娟王雅琦
李雪松 邵戎 尹娟 王雅琦
(四川省气象探测技术中心 四川省成都市 610072)
1 跟踪装置的现状、发展及意义
大气探测技术发展带动了气象数据电子化及自动观测业务日渐成熟,使得太阳跟踪、航空技术与天气业务等与探测技术结合紧密。从电能利用效率的角度,太阳能板载入双轴太阳跟踪平台利用率提高30%至50%。为提高发电效率该装置的使用历史已久,随其装置的应用和研究发展,该装置能测量部分气象数据,但高空球载平台应用罕见,对其改进后应用于高空可创造更高价值。在中国科学院大气物理研究所、微电子所、中国气象局及多个电子公司均有相关研究和课题。就半导体板供电效率为例,根据时期不同效率不同,与天气、所处地段等因素有关,效率低地区利用率只有约5%。使用该装置后,效率增加时间为太阳升起至正午,此段时间双轴太阳跟踪供能高于普通供能半导体板。最高可达原板功能的3 倍。
国际上1994 年捷克科学院物理所研制出了单轴被动式太阳跟踪器。1997 年Blackace 研制出了主动单轴跟踪器,但该装置只东西向对准跟踪太阳,南北向对准跟踪还需要手动调整,仅单轴热接受效率提高15%。1998 美国加州研制出了ATM 双轴太阳跟踪装置效率有所提高。2002 年2 月亚利桑那大学推出新型太阳能跟踪装置,拓宽了跟踪器的应用领域。2006 年西班牙Acciona 太阳能公司投入大量生产使用。
2 跟踪装置运行平台及总体设计
2.1 系统设计
系统通过多个串口和PC 机连接,实现每个器件与主干PC 机通信,将所采数据和运动控制器状态信息传输于主干PC 机,经处理结果作为步进电机转动指令,通过串口被控器件及采集器件与PC 机通信。跟踪装置至于不稳定的一级吊篮平台,作为二级平台承载功能设备实现姿态跟踪。由于一级平台在横滚角度、俯仰角度及方位角度均不稳定,使用开闭环双系统跟踪装置相互配合,闭环跟踪系统可按时间位置使阳光垂直落点进入可监测范围,开环系统在可检测范围内进一步调整以适应一级平台不断晃动、震荡的作用。太阳跟踪包括两个环节,即闭环和开环。开环系统是根据天文学理论已得出关于太阳运行轨迹的定理和公式,规划步进电机的路线实现太阳跟踪。闭环系统是使用PSD 探测实际光线入射角度和所需光线入射角度之间造成的距离差后,经过计算调整步进电机的角度。
2.2 硬件设计及指标
硬件系统由传感器、供能设备、核心器件、运动控制组成。供能系统是锂电池分为12V 和5V 的输出电压。核心处理器使用ARM7,英国ARM 公司设计的主流嵌入式处理器ARM7 内核是0.9MIPS/MHz 的三级流水线和冯·诺伊曼结构。运动控制是步进电机,驱动时需核心器件对驱动供电,采用7sc34型号步进电机。共用三个传感器四象限、限位开关、姿态磁传感器,PSD 备用。
跟踪过程为避免由于设备耐受条件限制如低温、精度不足等导致仪器不能正常运行或所测结果无法使用,表1 所示为相关技术指标参数。

表1:双轴跟踪装置技术指标
控制器需在核心处理器开闭环模式转换,光敏探测器与前置电路连接,所载信息传递至核心处理器,向运动控制驱动器发出指令使得转轴按指令转动。传感器主要有以下几种:四象限传感器、位置敏感传感器、姿态磁传感器、限位开关传感器。传感器将所采数据传送至核心处理器,器件联合跟踪设备组成系统。
2.3 限位开关
限位开关也称行程开关,安装于固定架上以控制两相对运动物体的距离以免相撞。运动物接近于静止物时,两开关之间相接处闭合,二者未闭合时两开关并未接触开关断开,处理器可通过开关的开合判断两物体相对位置。限位开关由高精度大传动比减速器、传感器和与其输出轴同步的机械记忆控制机构组成,体积小、功能多、精度高、限位可调。本装置中主要用以控制太阳高度角步进电机超过量程界限导致越位引起的器械物理碰撞,分别用作上限和下限,该传感器使用简单,只需外接两根导线,一根用于供能,另一根用于信号传输。
3 开环系统
3.1 坐标模型
早在1994 年,张迎胜、唐忆春、杨波等设计的极轴式太阳全跟踪系统已较为成熟,利用时角和仰角,将太阳轨迹以极坐标的形式表示。此体系以地球为原点建立三维立体坐标系如图1 所示。
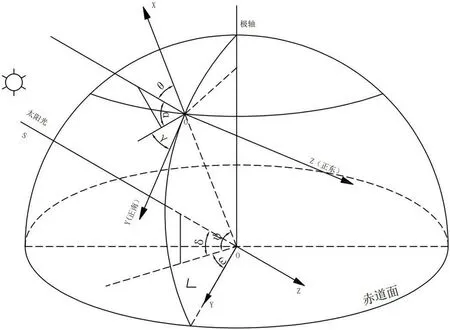
图1:太阳位置计算集合模型图
随后窦伟、许洪华、李晶等在地面坐标系太阳全自动跟踪系统方面有很大进展。该体系将地面所在位置作为原点,南北向为x 轴,东西向为y 轴,天地向为z 轴。将太阳轨迹表达与此坐标中如图2 所示。
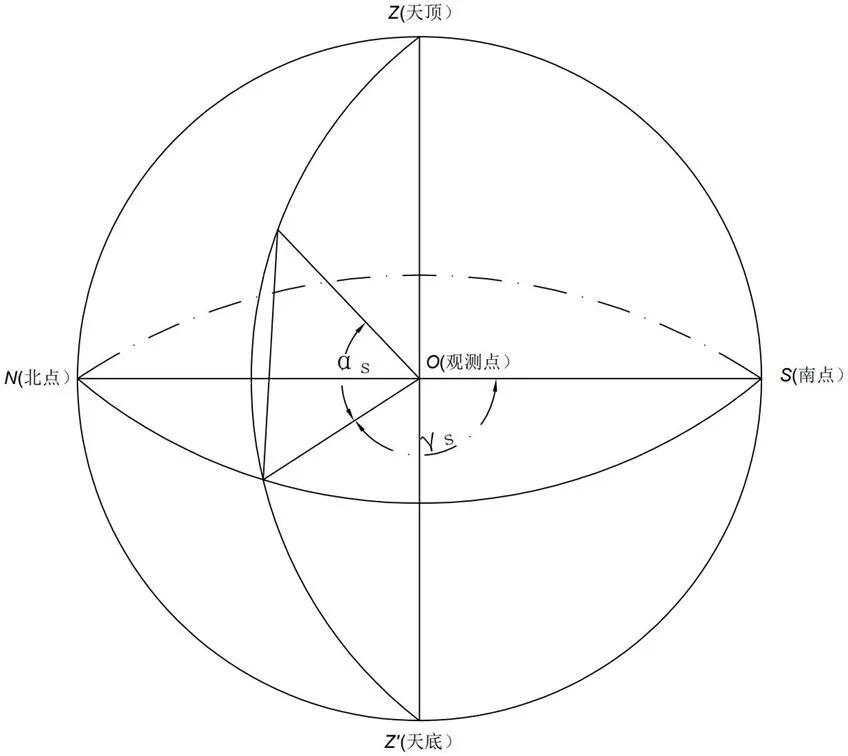
图2:以地面顶点为坐标的太阳位置计算图
系统实现太阳跟踪所得数据通过串口传输保存,使用C++语言编程实现。远程通信和自动控制通过串口通信,PC 与7sc34 和PSD 传感器分别连接于com1 和com2 口相互的通信。起始按字符传输,字符按位传输,传输字符以“起始位”开始且以“停止位”结束,字符之间没有固定时间间隔。异步通信双方时钟可容差值较大,同步通信时钟可容差值较小,效率则相反。
3.2 预测原理
地球自传的同时绕太阳公转,相对任意特定观测点,任意太阳位置可由入射光线高度角和方位角确定。太阳高度角(用α表示)是地球上观测点同太阳中心连线与地平面之间的夹角,太阳方位角(用γ表示)是地球上观测点同太阳中心连线在地平面上的投影与正南方向之间的夹角,如图2 所示。
太阳高度角α和方位角γ随时间不同而变化,并符合以下三角公式:

式中δ 是太阳赤纬角,φ 为当地地理纬度,ω 为当时的太阳夹角。太阳赤纬角δ 是指地心与太阳中心的连线与赤道平面之间的夹角,其粗略计算式为:

式中n 为积日(一年中第n 天)。太阳时角ω 是指太阳中心点到地心连线与格林威治天文台的东西之间的0°经线所在平面的夹角,我国区域的太阳时角ω 确定如下:

式中t 为北京时间,E 为当地与北京地区的时差,Lon为当地的地理经度。δ 和ω 两个参数的计算需满足高精度跟踪要求,需要考虑岁差、章动、蒙气差等诸多因素根据实际情况不断订正。根据上述方法可计算出太阳高度角与方位角从而确定太阳位置。该原理所使用的计算方法精度更高,即为本设计所采用的太阳位置计算方法,但难以避免长期跟踪产生的机械积累误差,需结合传感器检测等方法定期修正。
4 闭环系统
4.1 闭环设计原理
如图3 所示装置工作原理是通过传感器判断是否在监测范围内,如在内则启动闭环模式,如不在内则就启动开环模式。切换至闭环模式后通过传感器测量调整具体位置,如不在闭环可测量范围内切换至开环模式通过公式计算调整角度,不断重复探测。如直射点超出传感器探测范围则将模式切换至开环模式。
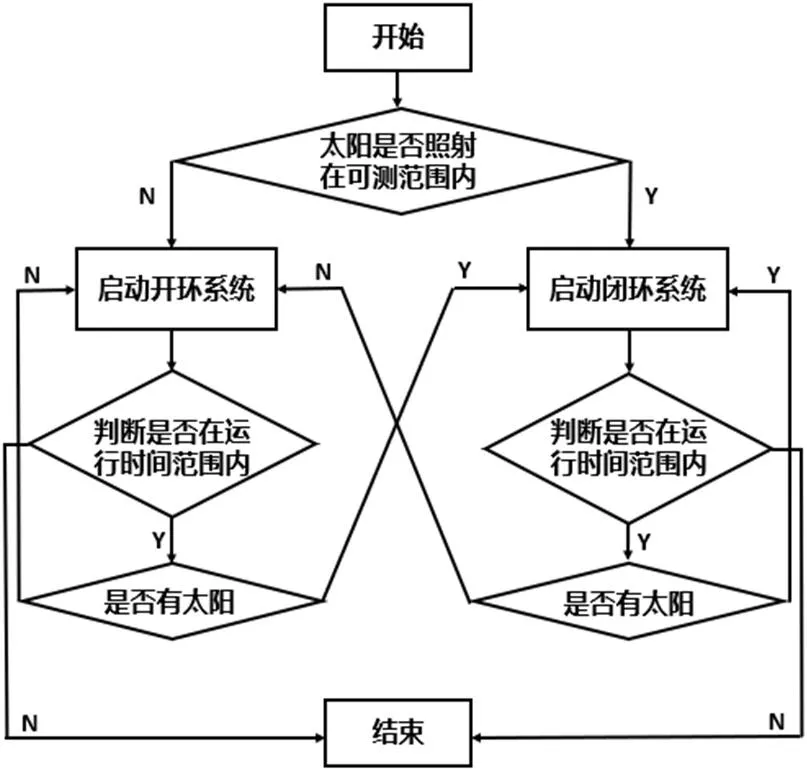
图3:核心处理器程序流程图
4.2 太阳跟踪传感的设计
4.2.1 光敏传感器的选择
PSD 可用于采集太阳位置信息作为备用,四象限传感器出现意外时使用PSD 临时代替。PSD 可分为三四边型、二面型、枕型三大类。四边型PSD 后期计算较为复杂,处理器需有较高的处理性能或添加后续电路,枕型PSD 因其制造工艺和工作原理工作面积较小,价格较贵。基于以上两点选择二面型PSD 较为合适,使用成本不会过高且保证了线性度。将两类传感器试运行比较时,PSD 光敏感探测器制作太阳跟踪装置后出现不断震荡的情况,每跟踪上就会发生震荡导致跟踪无法进行。换用四象限传感器后,则没有震荡问题。根据众多传感器指标衡量,采用四象限传感器作为主要位置采集工具。稳定性比较高,不会出现跟踪平面抖动,图4 为四象限传感器实物图。
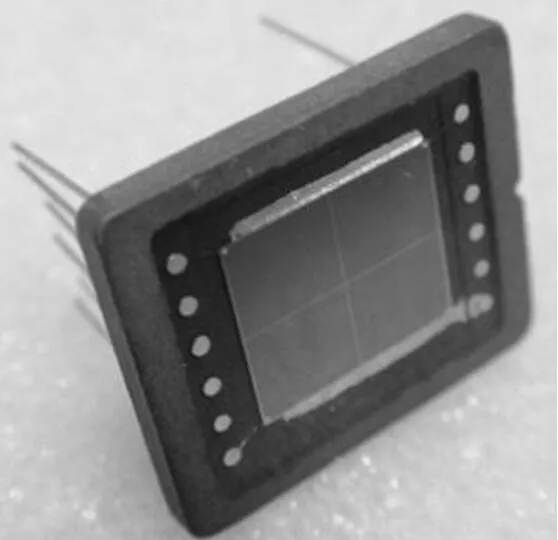
图4:四象限传感器
此传感器有效工作面积为100mm,精度间隔较小,暗电流低,工作时温度和存储温度-40℃到100℃之间,焊接时温度高达260℃,需离针脚2mm 远且焊接时间不超过5s。其应用不仅可用于太阳跟踪,在光学镊子、自动化瞄准、偏振光椭圆率测量仪等上依然有所使用。如图4 所示为所用传感器,需距离边角最近的四个针脚输出值,传感器焊接于电路板,再从电路板面接出导线,通过模数转换模块把信号导入处理器。根据输出电流大小判断太阳直射点离传感器有效测量面积中心的距离,最后通过计算得出步进电机运动指令,使直射点落于传感器中心。
4.2.2 四象限传感器的工作原理
闭环状态PSD 传感器探测太阳位置信息,把入射光光信号转换为电流信号,通过电流-电压转换电路把电流信号转换为电压信号,通过A/D 转换器将模拟的电压信号转换为数字信号与PC 通信,通过数据计算调整运动控制器角度使得直射点落于理想位置。
四象限探测器如图5 所示,由四个光敏面组成,之间由十字形沟道相隔,每个光敏面均为一个光电二极管,受到光照后对应象限有与光照强度成正比的光电流输出,光电流通过串联电阻转化为电压信号输出。
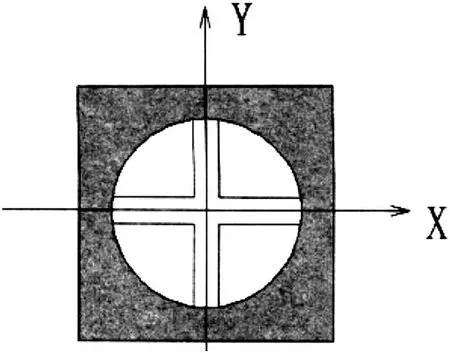
图5:探测器结构示意图
传感器的重要指标是四象限探测器象限间一致性,包括光响应度、感光面积、暗电流和结电容等参数,这些参数将直接影响测量和定位精度。设计四象限探测器传统方法是把四个型号完全相同的光电二极管按照直角坐标要求排列。此方法却有三点不足:很难满足象限一致性要求,二极管型号相同制作工艺却难免有细微差别;排列并固定二极管后要保证四个光敏面于同一水平面且象限间隔完全一致;光敏电阻等由于自身限制易发生散射和反射并且易受环境污染,导致传感器灵敏度偏低,从而影响跟踪精度和系统效率。为合理解,选用一片性质均匀的圆形太阳能光电板,圆心处由激光割出“十”字形沟道,形成四象限光伏探测器且各象限间具有很好的一致性,提高了传感器的精度和灵敏度。
大小合适的光斑如图6 所示光信号经光学系统于探测器成像。光线垂直入射时,光斑落于探测器正中如图6b 所示,四个象限输出信号相同。光信号偏离探测器法向时如图6a所示,四个象限成像面积不同,探测器分别输出电压信号幅度不同,比较其输出即可确定光信号的方位。如图5 所示光斑被四个象限分为A、B、C、D 四个部分,对应象限输出U、U、U、U四个电压信号,由(U+U)—(U+U)可得Y 向偏移量,(U+U)—(U+U)可得X 向偏移量。
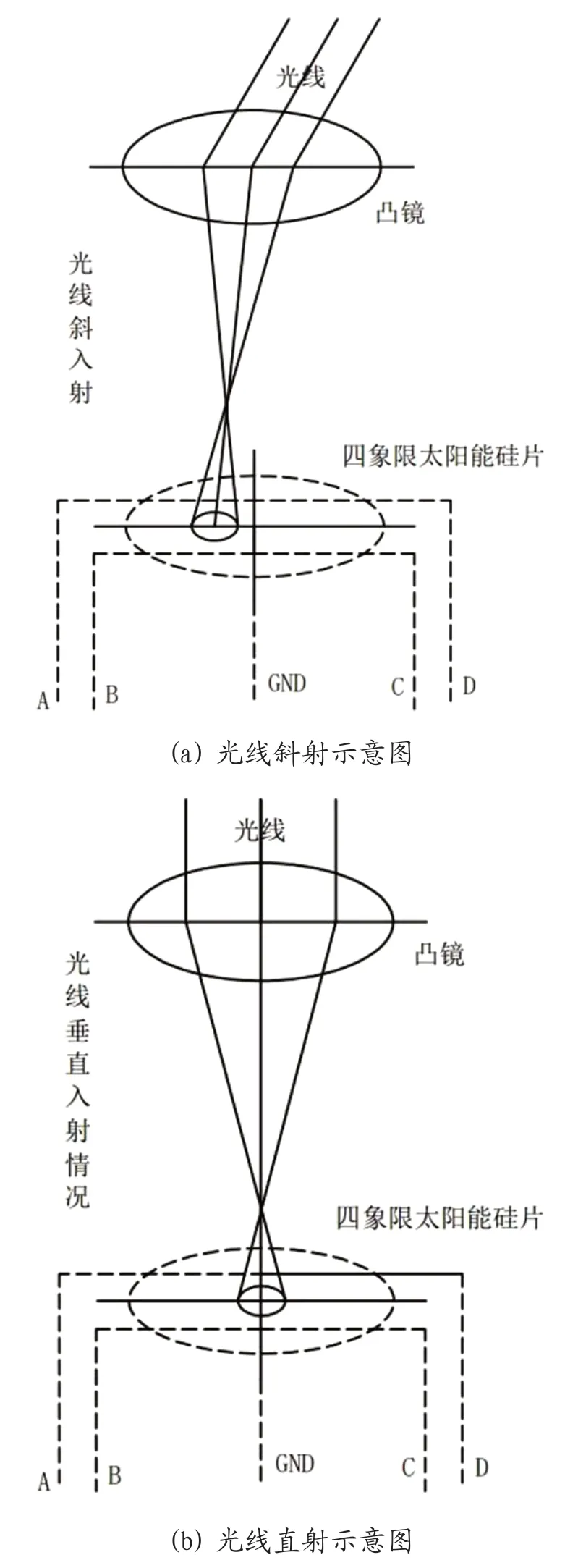
图6:光线入射示意图
5 总结
双系统太阳跟踪装置很大程度上解决了单一系统跟踪的弊端,开环系统需在太阳进入可观测法案为内跟踪,闭环系统不能检测到太阳角度的微小变化,而两套系统的切换有效的避免的了其中的弊端,互相补充提高了太阳跟踪效率。
