综采工作面自动化智能化开采技术研究
2022-07-09牛明敏
牛明敏
(兰花集团莒山煤矿有限公司,山西 晋城 048000)
自动化智能化煤矿基本机构可以分为如下四个阶段:第一,感知层;第二,传输层;第三,平台层;第四,决策层。
一般的,感知层主要是指感知层网络,主要功能为感知以及采集。当处于工作状态时:借助RFD 读写器、传感器、监测监控等实现对矿井设备的检测,从而能够时刻监测设备的运行情况,进而能够保证设备的安全有效的运行。对于传输层而言,其由有线接口、无线接口组成,通常能够进行数据传输以及反馈,这样能够把感知层采集到的数据发送给终端。数据传输层在自动化智能化矿井发展过程中具有非常大的作用。对于决策层而言,其能够为自动化智能化煤矿生产以及运输等提供给开发系统,其可以实现如下几个方面的功能:第一,识别危险源;第二,预警灾难;第三,对事故进行分析;第四,制定方案等。该层能够实现信息采集与矿井人员生产管理的交互,该层整理出数据后便于工作人员进行查看。通常情况下决策应用层系统包括如下几个方面的系统:第一,人员定位系统;第二,网络管理系统;第三,专家决策系统;第四,GIS 定位系统;第五,智能生产系统等等。
1 简述自动化智能化开采技术
1.1 液压支架跟机自动化技术
通常情况下,液压支架跟进自动化技术将采煤机所在位置当做工作的基准。与此同时充分结合如下工作面相关的几个参数:第一,顶板压力;第二,倾角;第三,采煤机运行状态;第四,液压支架姿态等。进而可以把生产环节划分为各个环节,进而可以确定有效地割煤工艺流程,实现自动决策,与此同时可以实现如下动作比如:第一,能够控制液压支架中部跟机动作;第二,实现端头清浮煤工艺;第三,实现装载机自动推进动作等等。该工艺可以实现工作面的有效衔接,进而能够提高安全生产的作用。要想促使该工艺发挥作用必须满足如下几个方面的条件:其一,确定好采煤机的位置;其二,保证智能工作面设备处于正常的工作状态;其三,控制采煤机的速度;其四,使得液压支架电液控制系统参数处于有效的状态。
1.2 采煤机记忆截割技术
该技术主要依据采煤机液压支架跟机自动化以及象限转换点,从而可以把采煤机记忆切割煤象限划分为几个区域,在进行切割的过程中必须依据示范刀相关的参数比如:工作参数、姿态参数、滚筒高度轨迹。进而实施自动化智能化运算,从而可以形成切割机的记忆模块,并且对参数进行调整,这样能够优化工作面液压支架工作面与采煤机之间实现精准的对接,由此可以看出不仅可以有效地提高自动化调整,而且能够有效地提高工作效率。
1.3 工作面视频监控技术
一般工作面视频监控技术可以有效地帮助工作人员将视线延伸到工作面。通常运用摄像仪对采煤机进行实时追踪,这样可以将跟机视频与推送进行对接,从而可以为人员提供可视化的远程监控。
2 自动化智能化放顶煤关键技术
2.1 振动法自动放煤
振动法自动放煤工艺是一种振动传感器起作用,识别不同物体碰撞时的信号差别,进而可以识别煤矸石。该工艺流程包括如下几个方面:第一,前端滤波平滑处理;第二,电信号去降噪处理;第三,功率谱分析处理。在该设备位置设置多种传感器,通常借助信息融合算法处理感知层采集的数据,与此同时将处理后的结果传输给液压支架传感器,最终可以实现对液压支架的智能化。
一般振动传感器放置在液压支架尾梁位置。在进行工作的过程中,可以将连接装置和相应的液压支架传感器进行连接,这样能够完成信号的交互。当处于放煤顶时,该传感器通过检测到煤矸石撞击尾梁生成的信号,接着可以识别煤矸石的状态,接着将煤矸石状态信息反馈给液压支架传感板块,从而可以有效地判断煤矸石下落的情况,假如判断发现煤矸石下落的参数满足设定的放落阈值时,那么支架控制器执行方煤口将会自动关系程序,因此能够进行自动化智能化的放煤[1]。
2.2 记忆模式自动放煤
记忆模式自动放煤主要能够在如下工况条件下工作:第一,地质必须保证稳定;第二,采煤工艺必须简化;第三,区域结构保持良好等。通常放顶煤是一个反复性的工作,因此可以选用智能煤矿记忆模式。按照采煤机记忆切割煤的记忆功能,从而可以将煤按照象限进行切割,并且可以依据示范刀相关的参数实现自动化智能化进行运算,实现记忆放煤。一般自动放煤控制器放置在液压支架位置处,这样能够更好地实现放煤控制采集信息。接着可以把获得信息传输给智能化系统,从而可以完整地自动化放煤程序,从而可以实现自动化的放煤。
3 自动化智能化开采技术存在的难题以及解决方法
3.1 智能化的采煤机调高
智能化的采煤机调高借助煤层赋存形式自动调整摇臂高度,最终可以精准截割煤层。其在工作的过程中借助固定模式的截割曲线进行自动截割,经过实践发现该形式不能更好地满足煤层赋存状态,大大降低了矿井的生产效率。
基于控制逻辑层来看,要想精准的优化截割机的精度,必须对煤岩体进行实时监测,从而能够有效地区分煤岩精确度。经过实践发现煤岩体赋存以及物理特性、雷达与红外线检测精度的影响,因此采用单一的煤岩体分界面识别的采煤机智能调高技术已经远远不能满足当前自动化智能化煤矿生产。鉴于此要想实现对采煤机精确度自动化智能化控制,必须兼顾如下几个方面的技术工艺:第一,煤层地质信息精准预测;第二,截割参数动态分析;第三,智能模拟模型推演等,最终就可以实现对矿井生产的精确化控制。
3.2 液压支架群组与围岩自适应
在煤矿机械化开采的过程中,液压支架群组是关键设备。在实践中发现虽然液压支架组群能够满足该矿井工况,可是在精确度方面却存在一定的问题。为此需要对液压支架群组以及围岩的智能化进行调整。
只有实现液压支架自主感知、智能支护参数以及随工作面采动情况实时改变支护等功能,进而可以使得液压支架组群满足围岩耦合性,图1表示液压支架群组协同控制逻辑。
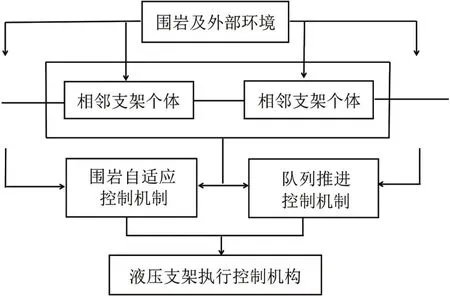
图1 液压支架群组协同控制逻辑关系图
为了能够有效地使得液压支架组群与围岩智能化自适应功能相匹配,必须从以下几个方面入手:
液压支架群组智能控制:在进行探究的过程中主要以单个液压支架为研究对象,而在液压支架组群方面的研究却比较少。经过调研发现工作面矿压存在不稳定性以及非均匀性。为此要想对整个工作面进行支护,必须以液压支架组群为研究对象进行分析。主要研究方向包括如下几个方向:第一,对液压支架参数进行分析,同时分析支架应力场分布;第二,分析支架阻力变化情况等。
支架状态自主感知功能控制:可以通过立柱压力传感器进行监测压力,经过探究发现该装置可以在围岩破坏方面存在一定的潜力。对支架自主感知控制功能进行优化,与此同时还可以检测工作面仰角与俯角等。
支架结构自主调控控制:只有将支架位置的初撑力、工作阻力、护帮力等进行优化,才可以实现支架自动化智能化控制。因此设计人员不断对支架结构进行优化,进而满足液压支架可调的效果[2]。
3.3 工作面直线推进控制
在运用液压支架群组时,往往受到各种因素的影响诸如工作面地质条件、浮煤对刮板输送机推移行程等,因此在前进的过程中存在一定的偏差,在刮板输送机位置出现错落不齐的现象,出现哑铃销损坏的现象等。矿井通常可以借助拉线以及红外光束来计算工作面推进尺度。通常借助人工调制管板输送机,因此效率相对低下,从而不能满足工作面自动化智能化的需要。
为此借助激光对位技术以及相应的惯导定位技术实现对工作面直线度的调整。经过实践发现惯导定位技术表现相对较好,能够满足自动化智能化调整工作面直线推进的效果。具体实施为:在采煤机上设置陀螺仪,这样可以有效地对采煤机进行有效地定位。假如采煤机处于推进状态时,系统可以对采煤机截割参数进行调整。与此同时液压支架依据截割图修正推进行程。
4 结语
当前通信技术的不断发展,并且由于自动化智能化的不断得到企业的认可,因此为了有效解决煤矿开采工作面的实际,将自动化智能化应用到煤矿开采关键技术,本研究以液压支架电液控制系统作为研究对象,从而开发出五种综放工作面自动化智能化开采技术,如下所示:第一,液压支架跟机自动化技术;第二,工作面视频监控技术;第三,采煤机记忆截割技术;第四,自动放顶煤技术;第五,远程集中监控技术。从而可以有效地解决工作面推进控制技术,最终能够为煤矿工作面推进的自动化智能化建设提供参考。
