基于PLC 技术的智能立体控制车库设计
2022-07-09郑国锋
郑国锋
(北票市职教中心 辽宁省北票市 122100)
近年来,家用车辆的不断增加,导致停车困难问题日益严重。而传统的停车场已经无法充满满足现在的用户停车需求。而立体车库作为一种将顺序、运动及过程等控制一体的机电一体化产品,能够有效解决城市停车问题。该产品主要通过PLC技术的控制系统实现对车辆的自动化存取。现阶段,随着智能化技术的升级,促使智能立体车库得到了相应的完善。因此,本文的研究通过对立体车库以及其工作原理基础进行分析,结合PLC技术设计出一种智能立体车库控制系统。
1 PLC技术和立体车库的概念及工作原理
1.1 PLC技术
PLC 技术(Programmable LogicController)是一种可编程的逻辑控制器,它不仅具备存储功能,还拥有控制速度快、高可靠性以及抗干扰性等优点。并且,由于PLC 能够对内部存储的程序实施逻辑上的修改和运算、顺序控制。完成用户的指令,从而在数字或模拟信号的输入和输出控制实现对设备的生产操作。其工作原理可以划分为输入采样、用户程序执行以及输出刷新等三部分。而三个步骤的完成为一个周期,进而PLC 能够实现对不同用户的重复扫描周期工作。
1.2 立体车库
立体车库首先是一种现代化机电一体化设备产品,它可以通过顺序、运动以及过程等方面的控制,借助控制系统实现对车辆的存取自动化管理。而基于PLC 技术设计的智能立体车库控制系统,通过PLC 实现对车库中电机的控制,然后借助相应的数据处理,实现对车辆和车位的升降与横移,从而达到车辆自动存取的目的。在智能立体车库使用过程中,用户只需要通过相应的ID 卡,就可以通过管控系统对入库或出库的车辆进行检测,接着通过数据库分析,找到用户的车辆,并将其通过升降、横移的方式将车辆搬运导指定的位置,这样就完成了整个车辆存取的过程。
现阶段的立体车库控制系统主要是通过、继电器、单片机以及PLC 控制来实现的。而本文所设计的智能立体车库控制系统,也是基于PLC 控制方式,实现对车辆的自动化存取、收款等。用户只需要借助触摸显示屏,就能够实现对车辆的自动存取,也可以借助通信模块实现对立体车库信息进行实时的远程监控和预约,具体基于PLC 技术的车库控制原理见图1 所示。
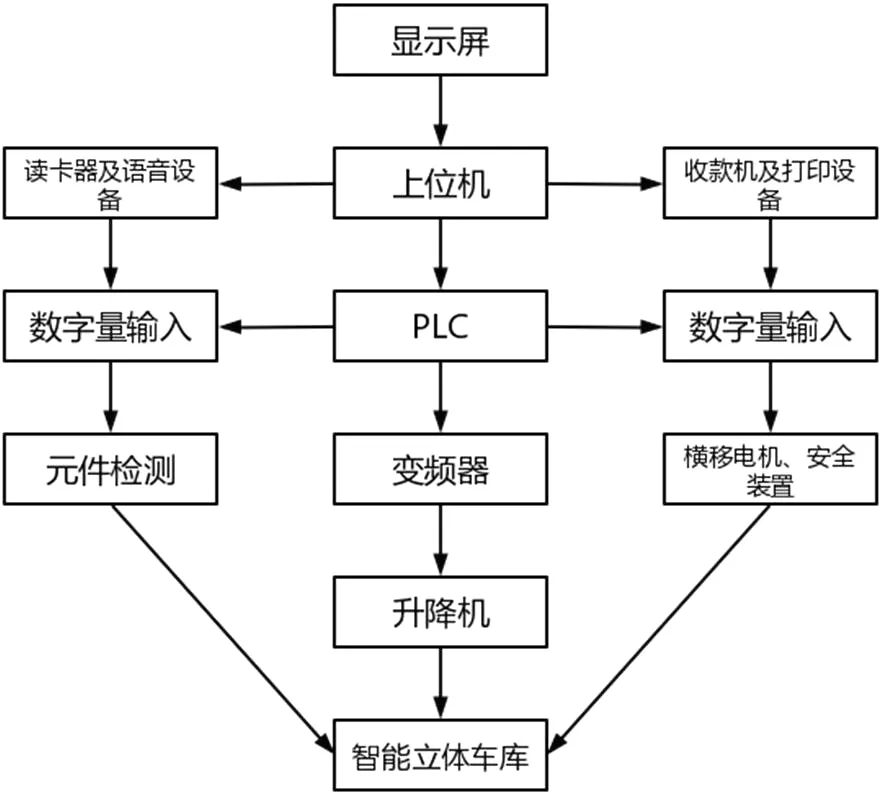
图1: PLC 技术的智能立体车库控制原理
而本文设计的智能立体车库为升降式横移立体车库,该车库的设计主要有机械结构和控制系统等部分共同组成。其车库机械结构则是由钢结构框架、传动装置以及停车板和安全防护装置等4 部分构成。其中立体车库的钢结构框架设计,可以将其换分成支撑和受力两个框架。受力框架实现了对车库车辆满载停车板、传动装置的剪切力等通,而支撑框架主要作用于辅助受力框架受力。传动装置通过利用三合一减速电机以及卷绳简等部分构成,由电机输出定理到卷绳简,使得卷绳简实现正反等方向的转动,从而将停车板上升到指定位置或下降到制指定位置。停车板的设计,通过利用高刚度波浪钢板,实现了对车辆重量的承载,并将其移动到规定的停放位置。最后,安全防护装置,为用户车辆在立体车库中的停放、误操作以及车库运行故障等方面事故发生提供了保证,还避免了载车板突然下坠对车库造成严重的影响。
2 智能立体车库的管控系统设计分析
针对智能立体车库的管控系统设计,可以将其划分为管理信息系统、入库引导系统以及关键控制算法等多个部分。
2.1 管理信息系统
该系统在智能立体车库中,能够实现人机交互、工作状态监视以及对日常数据的维护和工作任务分配等作用。同时,该系统最为核心的部分就是对系统数据库的操作、管理以及维护等。并且,该系统主要由停车卡管理模块、临时停车管理模块以及异常管理模块等多个功能模块构成,具体见图2所示。
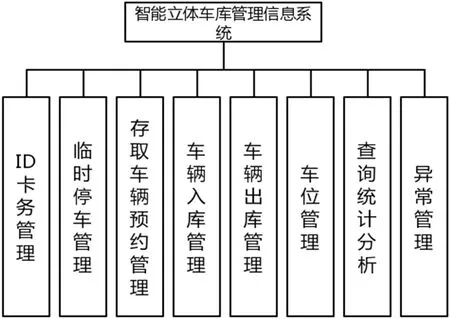
图2: 车库管理信息系统功能分析
2.1.1 停车卡管理
该模块的设计,主要是通过智能立体车库和ID 卡,共同实现对用户以及其车辆信息进行管理。该模块还包含了对ID 卡的发放、收回以及挂失、初始化以及信息查询等相应的功能操作。
2.1.2 临时停车管理
该模块的设计主要是实现了对临时车辆信息,通过人工对用户信息及车辆信息的录入以及存放于数据库当中,还实现了和上位机监控系统的连接。
2.1.3 异常管理
该模块的设计,主要是针对智能立体车库在管理过程当中,可能存在的一些未知问题或情况,如停车卡信息的异常处理、存放时间异常问题、远程预约异常管理、库位异常以及设备故障和车辆异常等相应的问题件管理。
2.2 入库引导系统
2.2.1 车辆超限检测
当拥有车辆想要停放在智能立体车库当中,在车库入口处需要对准备入库的车辆重量、尺寸以等进行超限检测,以此来保证入库的车辆能够符合立体车库的规格限制标准。
2.2.2 提升机下降安全检测当载车台
当车库下方存在人员或者其他杂物时,升降机会停止继续下放,这样能够有效降低事故的发现。在入库车辆或者出库车辆下放时,应当需要对其在载车台下方的区域及周围进行安全检测。
2.2.3 入库引导
当车库下位机接收到传感器所触发的信息之后,车库中相应的设备会结合控制程序所自动发出的信号,对显示提示的车辆分布进行向前、向后移动,定位和好以及车辆是否存在超限信息等提醒,并提示司机将车辆移动到准确的车位上。
2.3 关键控制算法
立体车库的关键控制算法可以将其划分为车位分配、交接调度、行走速度控制以及定位控制等四种算法。首先,车位分配算法,是结合立体车库中的车位分布状况以及入库车辆存放的性质等,通过自学习算法,实现对车辆的自动位置分配,从而保障取车效率达到最优。其次,交接调度算法,是通过根据用户存取车辆的过程当中,进行的一种交接流程。结合当前车库设备工作的状态以及相应的效率,在调度算法的作用下,实现最高效率的车辆交接。再者,行走速度控制算法,是通过利用双闭环的控制模型,以及相应的参数控制调整等,在对速度和位移的控制下,保证车辆平稳的实现停车。最后,定位控制算法,该算法通过结合速度以及所检测到的数据,从而对立体车库当前运行位置的区间进行计算,并结合其结果和目标的位置进行比较,以此来判断是否到位,这样就实现了对车辆的定位控制。
2.4 安全保护子系统设计
该系统的设计,主要借助于检测系统的自诊断功能对传感器信号进行检测,并通过自检算法的应用,实现了对传感器系统是否存在问题进行了实时诊断,以此为用户车辆的存取过程提供了保证。而从电气系统检测方面来说,同样利用算法,实现了对常规电气系统和关键元器件中是否存在故障问题进行实时检测。从而促进车库安全保护装置、供电系统诊断保护装置以及超速保护装置等多个方面的配置和保护。
3 基于PLC技术的智能立体车库控制系统设计
3.1 PLC控制系统框架设计
基于PLC 技术设计的智能立体车库控制系统,集合了横移功能、升降功能以及旋转功能为一体。并且,该控制系统主要由整体支撑框架与载车板、上下升降装置、旋转圆盘装置及横向移动装置、PLC 主控制系统以及PC 机和人机交互操作界面等多个部分共同构成,具体结构见图3 所示。

图3: 智能立体车库控制系统整体框架设计
从该系统框架中可以得知,控制系统以PLC为控制核心,通过该核心向下位机(PC 机和人机界面)实施信息输出,然后和变频器两者之间形成双向通讯。简单来说,就是PLC控制系统作用于变频器,而变频器则发作用与PLC。最后,变频器通过对驱动电机的转动频率,实现对车库装置的上下升降、左右横移以及旋转等工作。
3.2 智能立体车库软件智能控制系统功能设计
针对PLC 的智能立体车库控制系统设计,能够通过智能控制软件,实现停车场在无人值守的情况下,可以借助自动在线支付系统、智能自动车辆存取、远程预算和查询以及自动导航与监控等功能实现车联网的智能化发展。而由该功能共同构成的智能车库管理平台,可以使得用户借助移动客户端软件,很好的实现对客户车辆的停放与存取。
3.2.1 自动支付
该功能的设计,只要通过利用移动软件的在线支付功能,以及移动软件中的会员制与非会员制等划分,提供相应的车辆停放服务。如针对会员来说,可以不利用IC 卡进行费用支付,只通过移动软件的线上支付功能,就能够实现对车辆停放产生的费用进行支付。并且,由于智能立体车库在具备线上预约功能,因此还可以实现线上洗车、修车以及汽车保养等相应的业务预约。而非会员用户简单说就是临时车辆停放的用户,在每次停车后自动对本次车辆停放的费用自动扣除。
3.2.2 智能自动车辆存取
该功能,通过可编程控制器PLC 控制实现对车辆的自动智能存取。利用移动软件用户端,可以实现就近车位的寻找,帮助用户提高找寻车位的存放效率,降低车辆的能耗。同时,软件具备可操作性和方便性,不仅可以实现集中管理,还能够让用户自己进行操作。让用户利用移动软件导航进入到车库当中,居然后而记住自动识别系统,对用户车辆车牌号进行识别,从而通过载车盘将其移动到人车交接的地方。因此,用户在取车操作过程当中,会将车辆停放到安全的位置上,然后当灯亮起停车正常指示灯后,就完成了取车操作,同时立体车库门也会自动关闭。所以,整个车辆存取的过程非常连贯,从一定程度上大大降低了车辆存取的时间。不过,在立体车库当中,车辆载盘在移动过程当中,系统会对其进行严格的检测,如果发生故障,整个智能立体车库的载车盘会停止运行,直到故障问题得到解决车库才会恢复正常工作运行。
3.2.3 远程预约或查询
智能立体车库的远程预约和查询系统,主要通过现场的控制器以及网卡和移动软件等相应的网络设备,与车库控制中心的局域网进行连接。接着利用MODEN 实现对远程访问可管理。这样一来可以实现对车库现场运行情况进行检监测的目的。并且,当控制中心在受到信息之后会及时的将信息反馈到移动软件系统当中,帮助用户对车库的最新数据进行快速的查询,从而为用户的停车问题提供便利。
3.2.4 自动导航
该系统的设计,主要是作用在立体车库的出入口出。在车库出入口上放置费接触式的车牌号码读取器,以及感应线圈和倒闸,可以帮助用户快速的通过移动软件在立体车库入口处,利用系统自动判别用户车辆的停放时间。然后由系统中央处理器,计算出快速的取车方面,然后将车辆运送到最佳的位置当中。
3.2.5 安全监控
该系统的设计,主要作用于智能立体车库无人管理的前提下,可以通过对车库现场监测的数据和运行情况,将车辆运动检测、车牌识别以及网络数据连接等功能实现联动,从而降低车库的人工成本。
3.3 车库控制系统硬件设计
智能立体车库控制系统设计过程当中,针对控制器的选择本文选用了拥有24 个输入口和16 个输出口的无锡沸腾3U40MR 型号控制器,同时该控制兼容(三菱FX3U40MR)。在触摸屏显示器的选择方面,本文设计过程当中采用了We nview TK6071 IP,然后借助系统结构和PLC控制器,使得两者实现了通讯,并作用于车库停车板的运动控制。而继电器的设置主要是利用12VDC 的继电器板,其作用能够实现对智能立体车库的电机电源进行控制,还能够实现对电机的正转、停止以及反转等操作。最后,电源的设计主要利用直流电源变压器,为车库设备电机以及PLC 控制器、继电器提供供电服务。
3.4 车库控制系统软件设计
3.4.1 通信程序
为了能够进一步保障上位机和下位机两者之间的能够实现正常的通讯,在联网的选择过程当中,本文选择利用Profibus--DP 协议,使得智能立体车库的通信功能形成单主站系统,能够让车库在最短时间当中完成总循环。最后,通过I/O 设备,还可以实现PLC 控制器与检测单元、执行机构等多方面之间的连接。
3.4.2 复位程序
首先,由于PLC 技术自身具备优点,在内部继电器和多数寄存器中都具备记忆功能,因此在车库运行过程当中需要实现对PLC 控制器的内部数据进行复位初始化,以此来避免和预防部分事故分为的出现。
3.4.3 车位号输入程序
当用户在智能立体车库前请求存取车辆后,可以通过在上位机的监控界面,利用手动或者自动的方式来输入车辆车位号,以此通过控制系统对车位进行确定,并利用搬运机对车辆进行存取。
3.4.4 电机控制程序
该设计主要针对智能立体车库中所拥有的电机运行,实现对用户车辆的存取。一般立体车库当中会配置4 台电机,分别为搬运起重机大车电机、搬运起重机小车电机以及升降架和提升机等部分。其中,起重机会结合车辆的大小来设计相应的移动路径,并进行水平、垂直的运动。而升降架和提升机两者会分别实现车位的上升或者下降活动。不过该些电机的正反状态运行都是由开关量来实现控制。
3.5 车库主电路设计
针对立体库存控制系统的主电路设计可以将其划分为基于PLC 控制的弱电控制电路和动力回路等两个部分构成。其中,立体车库中的主升降电动机是通过变频闭环速度控制以及高精度编码器组成的交流电动机。在应用过程当中,由于升降机的功率较大、速度快和减速时间短等优点。为了能够有效实现对升降机的控制,可以通过利用动力回路进行制动电路与制动单元配置,以此实现升降机在加减速时,可以所需大电流。同时,为了有效避免弱电回路带来的干扰问题,在设计过程当中,可以通过选用主回路变频器,并在该变频器前后端增添滤波器,实现对编码其信号回路的磁环抑制干扰。而升降电机作为该系统最为核心的部件,为进一步保障其安全运行,可以实施上下双极限保护方式,增添强制减速开关和断绳保护开关,对其进行保护。此外,想要保障轿厢平面与停车位平面两者之间的平层度,符合搬运器运行的条件,在系统设计过程中,可以利用平层定位装置来实现系统设计。弱电控制系统则可以选择远程IO 网络模式实现控制系统构建。
4 上位机监控系统设计和仿真实验
4.1 上位机智能立体车库监控系统设计
整体的智能立体车库控制系统设计过程当中,上位机的监控系统设计主要起到了对智能立体车库的运行状态进行检测和管理等方面的作用。并且,通过MCGS 组态软件还能够实现上位机和下位机PLC 控制两者之间,借助以太网实现通信连接,以及组态软件和PLC 两者之间的数据同步,最后完成上位机对智能立体车库的监控和管理。同时,上位机监控系统的功能主要分位信号的发送存取和设备运行状态的显示。首先,信号发送存取是指用户和工作人员通过上位机的监控画面实施操作,并按下车辆存放和提取等按钮,实现车辆存取信号发送。其次,设备运行状态的显示,就是指利用开关量,将上位机的组态画面中的点和智能立体车库中的设备进行连接,然后通过对数据的采集,让车库现场的状态在组态界面上显示,以此实现对车库现场各个设备的实际情况进行实时反应。
4.2 仿真实验
为了确认基于PLC 技术设计的智能立体车库控制系统的可行性和上位机监控系统的有效性。可以通过设备的窗口内,在设备工具箱中增添以太网模块和通用的TCP/IP 设备。接着在对这两个不同的设备的属性进行分别配置。而本地的IP 地址则为显示触摸屏的IP 地质,并将其远程IP 设置成和PLC 的CPU IP 相对应的地址。然后,利用以太网模块设备中的编辑窗口,对设备通道进行添加。以此实现对MCGS实时数据对象和PLC 控制器中的变量之间的连接配置。当和PLC 实现通讯连接后,其硬件组态配置完成,可以将其下载到配置窗口当中,再通过对组态工程的设计,下载到基于MCGS 搭建的模拟运行环境当中,从而实现对系统的模块和工程下载。当工程提示下载完成之后,系统机会自动打开MCGS 模拟运行环境。并在相应的界面当中,输入所需要存取的车辆车位号。再选择存取车辆按钮的点击。同时,可以通过对下位机PLC 发送车辆存取车的控制指令信号,实现对车辆的存取。
5 结语
综上所述,基于PLC 技术设计的智能立体车库控制系统以及基于MCGS 组态软件设计的立体车库上位机监控系统,有效解决了当前城市和人口密集地方的停车问题。同时,通过仿真模拟环境,对部分车位存取控制过程进行了实验,结果表明了该系统的可行性,实现了车辆的自动化存取操作。
